张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 » 《随便一记》 - 第179页
目标检测数据集之离线数据增强
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 483次

目录1.数据增强概述2.目标检测离线数据增强步骤(一定要先看,便于理解过程)3.数据增强代码 4.代码运行5.完整代码6.结果展示1.数据增强概述海量数据是目标检测的基础,而针对于特定场景的数据往往需要自己获取和标注,往往需要耗费大量的人工成本和时间成本。而数据增强则能很好的解决这问题。与简单的数据增强方法不同,目标检测的数据增强不仅要考虑图片的相应转变,还要实现图片内所标注坐标的转换,即目标检测的数据增强既要生成原图片的衍生图片,同时还需生成相应的xml文件(pascalvoc数据集为例)。因此目标检测的数据增强与图像分类的数据增强有很大的不同。往往目标检测的数据增强又分为在线数据增强和离线数据增强。大多的目标检测模型都默认带有在线数据增强,通过相关配置文件就能实现,优点
matlab eval 函数的使用
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 353次
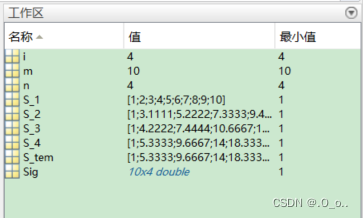
文章目录前言一、eval函数二、代码示例总结前言很多时候在用matlab进行编程的时候,我们需要给多个变量命名和赋值,如果用手一个一个的去敲,多少会感到无聊且枯燥,而且还显得不专业。利用for循环和eval函数即可实现多变量的命名和赋值。一、eval函数在matlab帮助文档中,对eval函数的描述如下:使用语法:eval(expression)[output1,...outputN]=eval(expression)其中expression为要实现的代码。光看matlab的帮助文档可能对eval函数的实际使用的帮助不是很大,实际上,eval函数可以理解为直接在matlab命令行中运行括号里的matlab语句。以下我将结合代码实例来帮助大家理解。二、代码实
手把手教Kaggle账号注册-不翻墙
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 1459次

众所周知,kaggle注册主要问题是人机验证,即报错Captchamustbefilledout.注册前,请先按照如下步骤先配置,以解决人机验证不显示的问题。第一步:下载edge,https://www.microsoft.com/zh-cn/edge/home?form=MA13FJ 第二步:找到下载好的文件,如下图,双击安装。 第三步:在Edge中,点击“扩展”-“管理扩展”。 第四步:点击“获取MicrosoftEdge扩展” 第五步:搜索“HeaderEditor”,选择第二个,点击“获取”,“添加扩展” 第六步:添加后,会在输入框出现下图所示图表,点击图标,再点击跳出来的卡片上的“管理”,即可完成插件安装。 第七步:点击“导入/导出”,再在下载规则
【路径规划】局部路径规划算法——人工势场法(含python实现 | c++实现)
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 430次
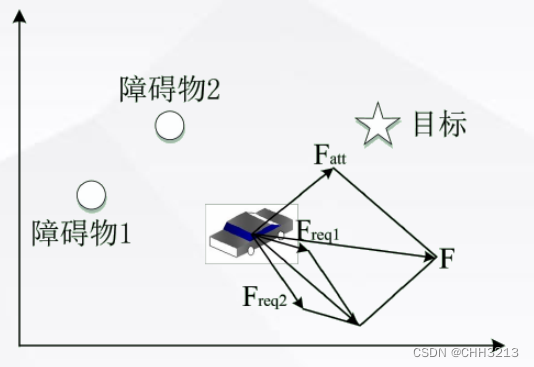
文章目录参考资料1.算法简介2.算法精讲2.1引力势场2.2斥力势场2.3合力势场3.引力斥力推导计算4.算法缺陷与改进4.1目标不可达的问题4.2陷入局部最优的问题4.3解决方案4.3.1改进障碍物斥力势场函数4.3.2道路边界斥力势场5.python实现6.c++实现参考资料路径规划与轨迹跟踪系列算法基于改进型人工势场法的车辆避障路径规划研究基于改进人工势场法的车辆避障路径规划研究1.算法简介1986年Khatib首先提出人工势场法,并将其应用在机器人避障领域,而现代汽车可以看作是一个高速行驶的机器人,所以该方法也可应用于汽车的避障路径规划领域。人工势场法的基本思想是在障碍物周围构建障碍物斥力势场,在目标点周围构建引力势场
【C++】| C/C++内存管理
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 415次

前言:在上期,我们已经对类和对象的全部知识进行了总结和梳理。在类和对象学习完之后,今天我将给大家呈现的是关于——C/C++内存管理的基本知识。 本文目录1.C/C++内存分布2.C语言中动态内存管理方式(1)C语言跟内存分配方式(2)C语言跟内存申请相关的函数(3)面试题3.C++中动态内存管理3.1new/delete操作内置类型3.2new和delete操作自定义类型4.operatornew与operatordelete函数?5.new和delete的实现原理5.1内置类型5.2自定义类型6.定位new表达式(placement-new)7.常见面试题7.1malloc/free和new/delete的区别8.总结
贯穿设计模式第三话--依赖倒转原则
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 353次

???茫茫人海千千万万,感谢这一刻你看到了我的文章,感谢观赏,大家好呀,我是最爱吃鱼罐头,大家可以叫鱼罐头呦~???从今天开始,将开启一个专栏,【贯穿设计模式】,设计模式是对软件设计中普遍存在(反复出现)的各种问题,所提出的解决方案,是一套被反复使用、多数人知晓的、经过分类编目的、代码设计经验的总结。为了能更好的设计出优雅的代码,为了能更好的提升自己的编程水准,为了能够更好的理解诸多技术的底层源码,设计模式就是基石,万丈高楼平地起,一砖一瓦皆根基。✨✨欢迎订阅本专栏✨✨?本人不才,如果文章知识点有缺漏、错误的地方?,也欢迎各位人才们评论批评指正!和大家一起学习,一起进步!?❤️愿自己还有你在未来的日子,保持学习,保持进步,保持热爱,奔赴山海!❤️?
调用一个函数时发生了什么?
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 311次
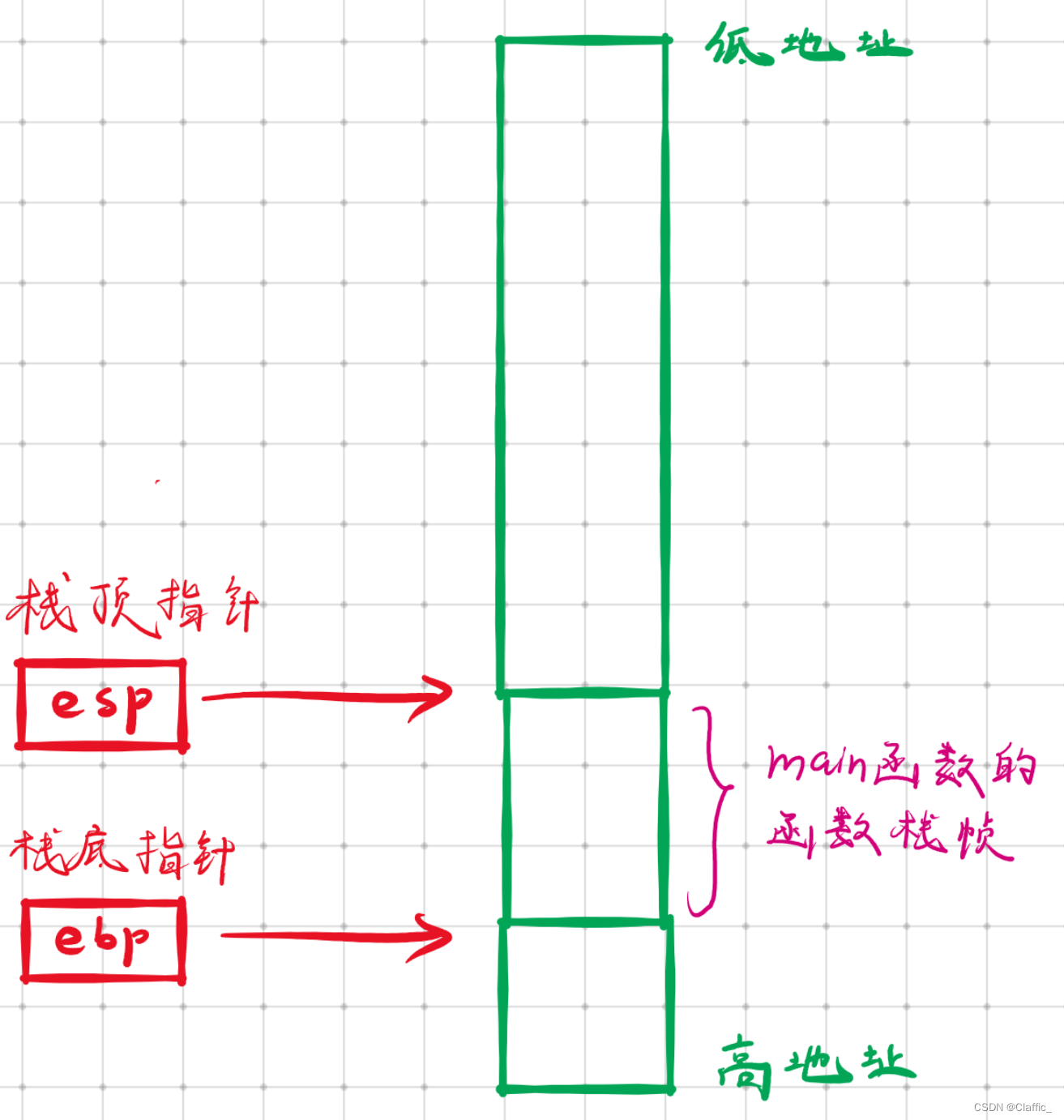
欢迎来到Claffic的博客 ??? 前言:用C语言写代码,如果一个工程相对复杂时,我们往往会采取封装函数的方式。在主函数中调用函数这一看似简单的过程,实际上有很多不宜观察的细节,这篇博客我将带大家深入探究函数调用的每个细节。注:内容偏向底层原理,可能会比较复杂,但我相信看完后你会对函数调用有一个更加深刻的认识。目录?Part1:相关问题及概念铺垫1.几个相关问题2.寄存器3.函数栈帧4.函数调用栈5.相关汇编指令?Part2:函数栈帧的创建销毁具体过程1.前期准备2.main函数预开辟栈帧3.实参的创建和初始化4.Add函数的调用5.栈帧的销毁❤️Part3:问题答案揭晓Part1:相关问题及概念铺垫1.几个相关问题
【软件教程】如何让vscode连接ssh时记住密码
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 384次
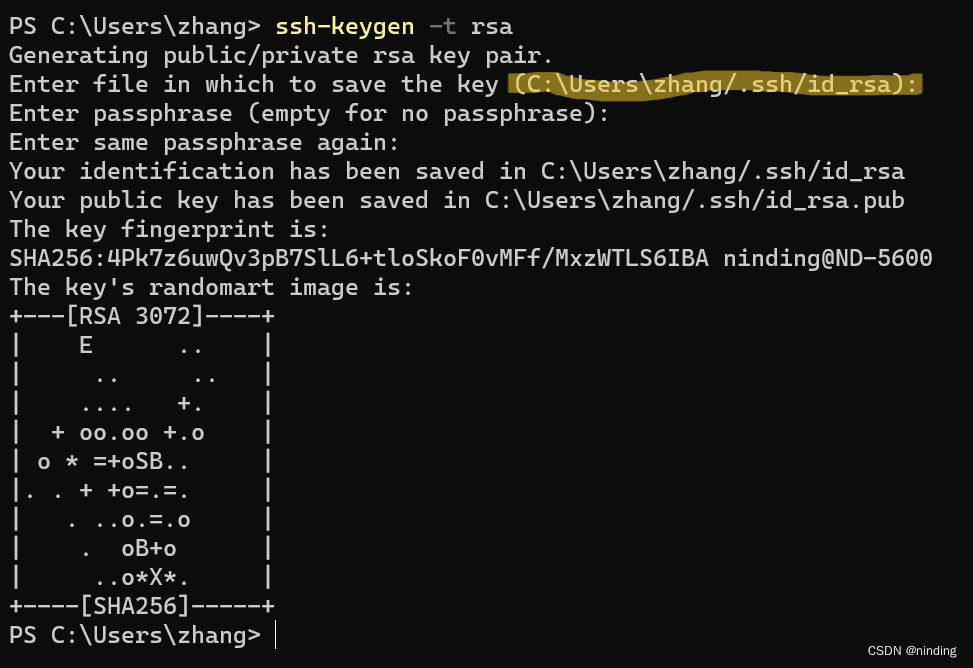
准备软件客户机安装vscode。(vscode官网https://code.visualstudio.com/)客户机和服务器配置ssh,确保能够连接。VSCodessh记住密码教程一、在Client客户机生成ssh密钥对打开客户机的cmd命令行,输入命令ssh-keygen-trsa,然后全部回车。使用vscode打开c:\users[Client用户名]\.ssh\id_rsa.pub。(其中[Client用户名]对应客户机的用户名)然后复制文件内容。二、在Server服务器中添加许可使用命令行cd/home/[Server用户名]/.ssh进入到.ssh文件夹下。(其中[Server用户名]对应服务器的用户名)使用touchauthorized_keys创建许可
【交通数据(1)——加州高速路网PeMS交通数据】
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 534次
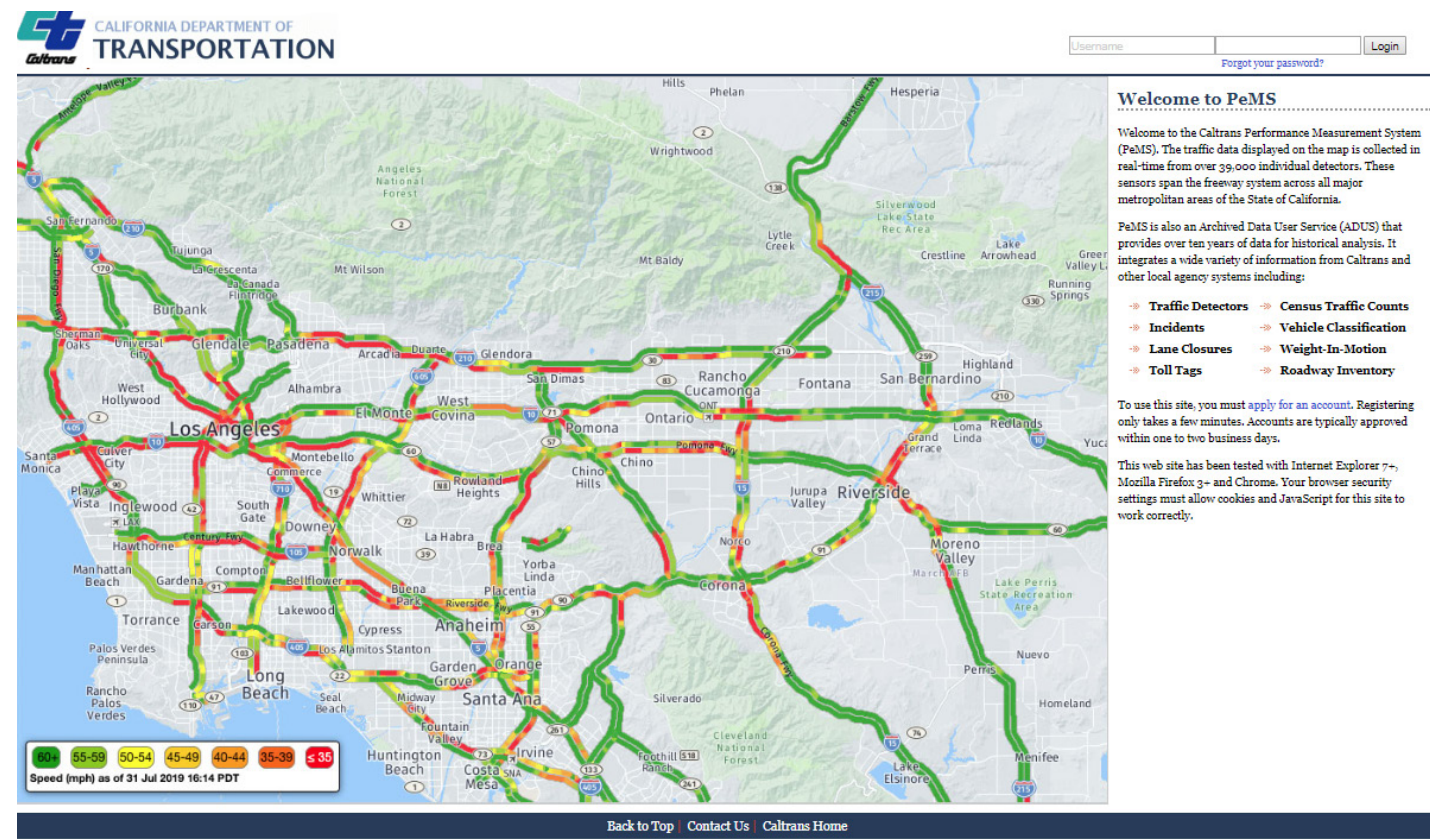
交通数据(1)——加州高速路网PeMS交通数据一、PeMS数据介绍1.数据来源2.数据特点3.数据诊断与处理4.PeMS数据格式二、相关数据下载1.相关数据链接2.数据爬虫下载3.部分路网数据集(持续更新中···)一、PeMS数据介绍1.数据来源 PeMS提供了一个统一的交通数据数据库,该数据库由加州运输公司在加州的高速公路上收集,以及其他加州运输公司和合作机构的数据集。这些数据可以让用户对高速公路性能进行统一、全面的评估,基于对高速公路网络当前状态的了解做出运营决策,分析拥堵瓶颈以确定潜在的补救措施,并做出更好的整体决策。智能交通系统(ITS)车辆检测站(VehicleDetectorStations:VDS);流量统计站:TrafficCe
多模态分析数据集(Multimodal Dataset)整理
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 1352次

这里整理一下平时所用的多模态数据集以备之用,主要分为多模态分类(情感分类,影视分类)多模态问答多模态匹配(检索)多模态生成后面会不断地去添加,也希望能够帮到其他人,欢迎大家补充。【0】.多模态以及其他方向如何入门或者查找数据集?看到评论区有很多小伙伴对多模态方面不知道怎么入门,不知道使用哪些数据集,最简单的方法是找一篇最近最新的相关方向的多模态论文,通过relatedwork可以了解这个方向的发展,通过experiment了解这个方向比较受欢迎的一些数据集。论文可以用google学术或者arxiv查,基本上能查到目前大部分的论文。https://www.aclweb.org/anthology/这个网站有很多会议论文,包括ACL,EMNLP等等htt
search zhannei
最新文章
-
- (凌烬寒戚无筝)她见过他爱过的模样小说最终篇章章节在线无广告高口碑小说
- 小说宋可清(宋可清)已更新+无删减(完蛋!我把反派大佬撩红温了)
- 唐圆圆小说(七十年代养娃后成为对照组)起点章节+全篇阅读热门作品预订
- 沈棠陆凌枭小说(重生拥有死神眼,大义灭亲全家哭)(沈棠陆凌枭)在线畅读阅读连载中
- 热文推荐很快,他们都自由了:全文+番外(叶浅秋陆凌川)书荒必看列表
- (新欢闹上门,明小姐消失后司总悔疯了):+后续+番外司锦修明悦后续全本浏览阅读
- 夕景昨日无心怜冷秋语洛斯言后续(冷秋语洛斯言)全文在线下载在线+纯净版结局
- 落青梅,佛前几度相思泪:+后续***(宋佳音陆景琛)终章阅读无广告
- 很快,他们都自由了:结局+番外新上热文(叶浅秋陆凌川)最近章节列表
- 养妹被豪门认回后做成女体盛,缅北杀神的我杀疯了完结全文_妹妹苏月月宾客优质全文_小说后续在线阅读_无删减免费完结_
- 京圈太子爷扫黄被抓,我改嫁八块腹肌风流俏奶爸列表_京圈太子爷扫黄被抓,我改嫁八块腹肌风流俏奶爸(许知意顾云夕)
- (书荒必看)夏晚歌陆秋震惊!玄学大佬被读心了:+后续热血十足
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1