第一次在网上写博客类的东西,记录下之前使用信捷的一款PLC驱动台达脉冲伺服电机的接线方法,写在这里方便以后查看。
目的:使用信捷PLC通过台达的脉冲伺服驱动器实现闭环的伺服控制
设备:
1、信捷PLC,型号:XDM-60T10-E

图1
2、台达脉冲型伺服驱动器(以下简称驱动器)及伺服电机,驱动器型号:ASDA-AB (220V 系列)
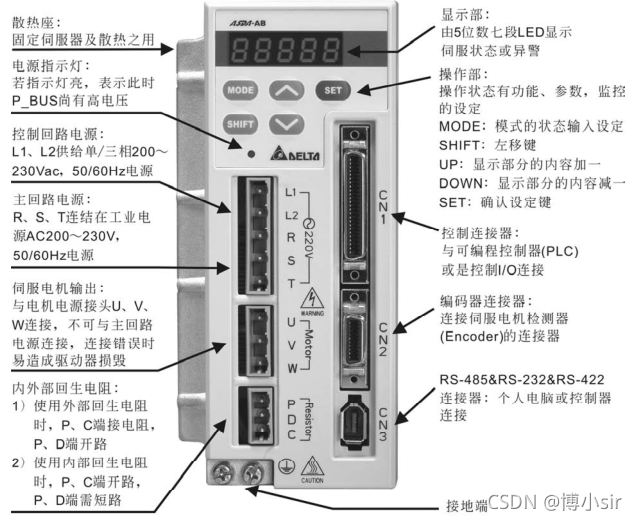
图2
步骤:
如图3所示,根据台达驱动器手册中的接线说明,我们可以知道PLC与驱动器是通过CN1端子连接的,但是这种旧式的脉冲型伺服驱动器都没有配备与PLC等上位控制器连接的标准规格线缆。需要通过50-pin SCSI线缆以及图中的ADD-DM-50A端子模块将管脚引出,自己接线到PLC。
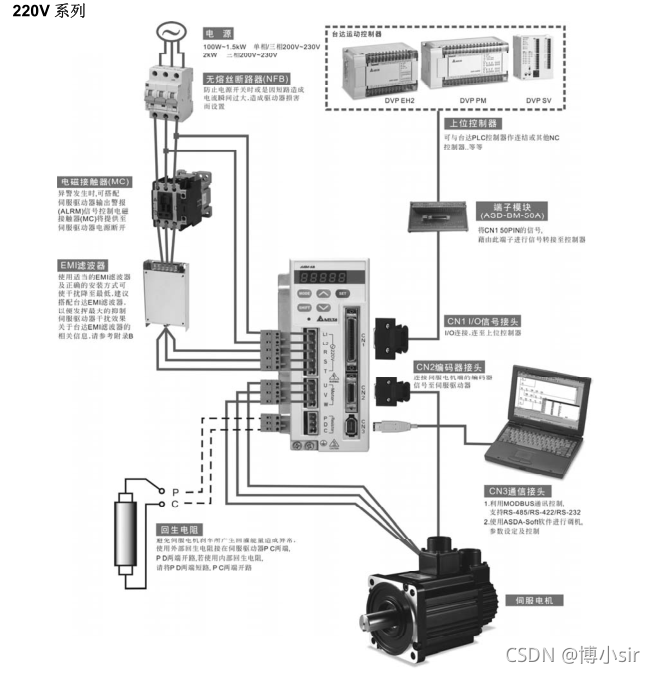
图3
端子引出模块可以在淘宝上买到,搜索建议:SCSI 50P。在这里贴一张端子模块的实物图。
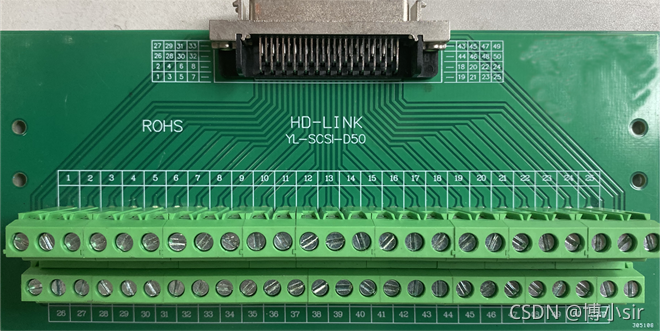
图4
台达驱动器的用户手册提供了CN1端子的管脚定义,如图5、图6所示。
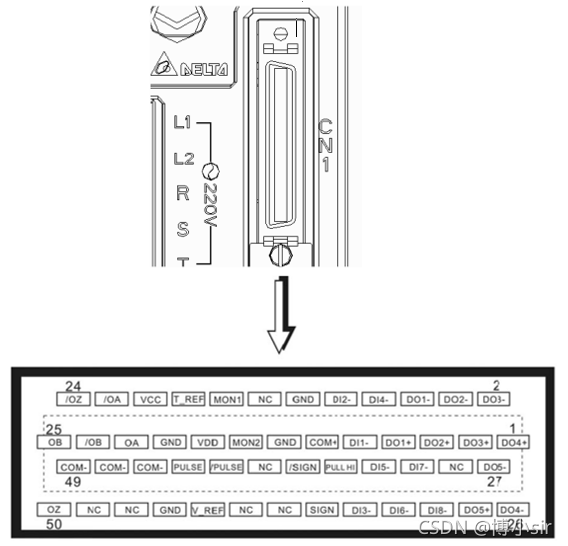
图5
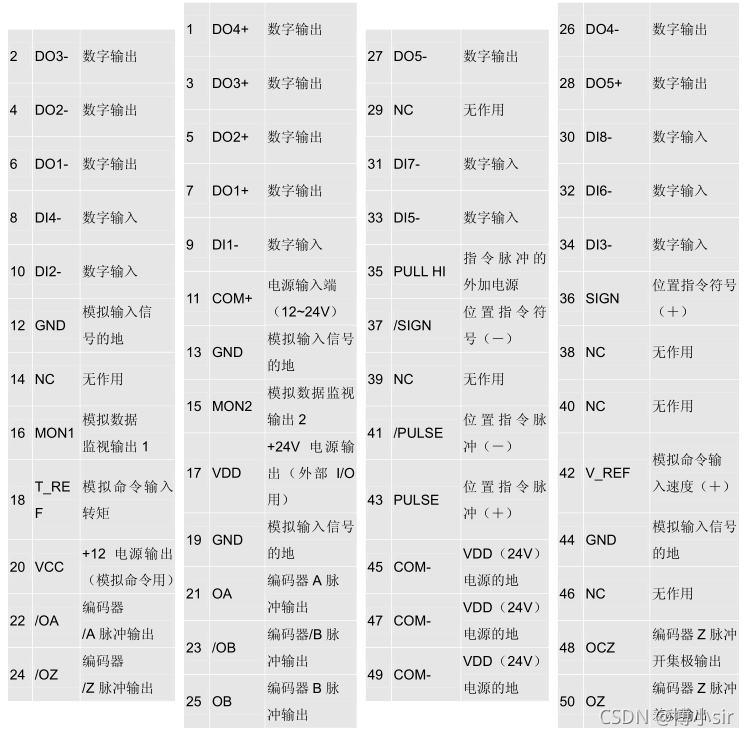
图6
脉冲型伺服电机的控制信号有三种脉冲形式,分别是正反转脉冲、脉冲+方向、AB相脉冲,具体定义如图7所示。
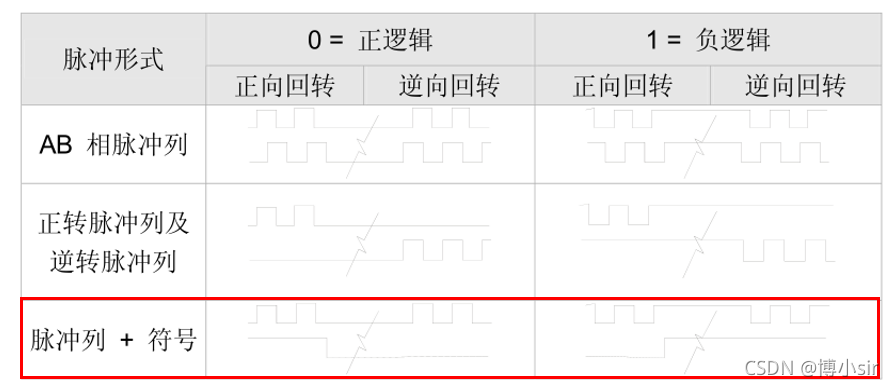
图7
查看信捷的PLC手册,可以找到XDM-60T10这款PLC的脉冲输出端口定义及脉冲输出形式,如图8所示。其输出形式只能支持脉冲+方向,即上图中的第3种脉冲形式,输出方式为集电极开路。因此下文只针对这一种脉冲输出形式的接线进行说明。当然,其余形式的脉冲控制也能够实现,前提是需要在PLC和伺服驱动器之间增加脉冲信号的转换模块,篇幅有限,之后再介绍。
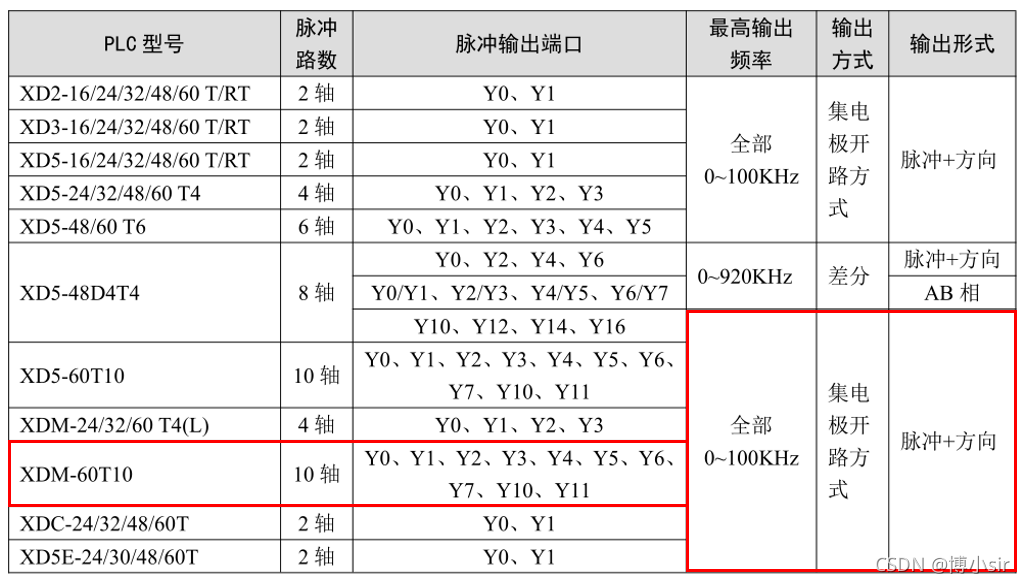
图8
去驱动器的手册查找集电极开路输入信号的接线图,如图9所示。
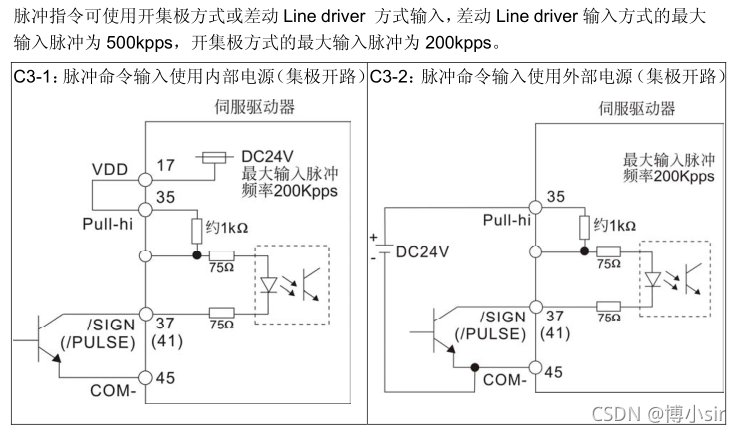
图9
为了尽可能的简化接线,选择使用内部电源输入作为脉冲命令的参考高电平,即采用图9左所示的接线方式,伺服驱动器侧只需要1根内部电源线和3根外部接线即可实现控制。信捷XDM-60T10-E这款PLC和台达ASDA-AB伺服驱动器之间的最简单控制接线如图10所示。图中的9号管脚SON定义为伺服使能信号,SON接24V为伺服失能,SON接地为伺服失能。实测不接线默认为伺服使能状态,可以选择不接。本案例中PLC输出端口的功能定义如下:Y0为脉冲序列的输出端口,Y1为脉冲方向的输出端口,Y2为使能信号的输出端口。
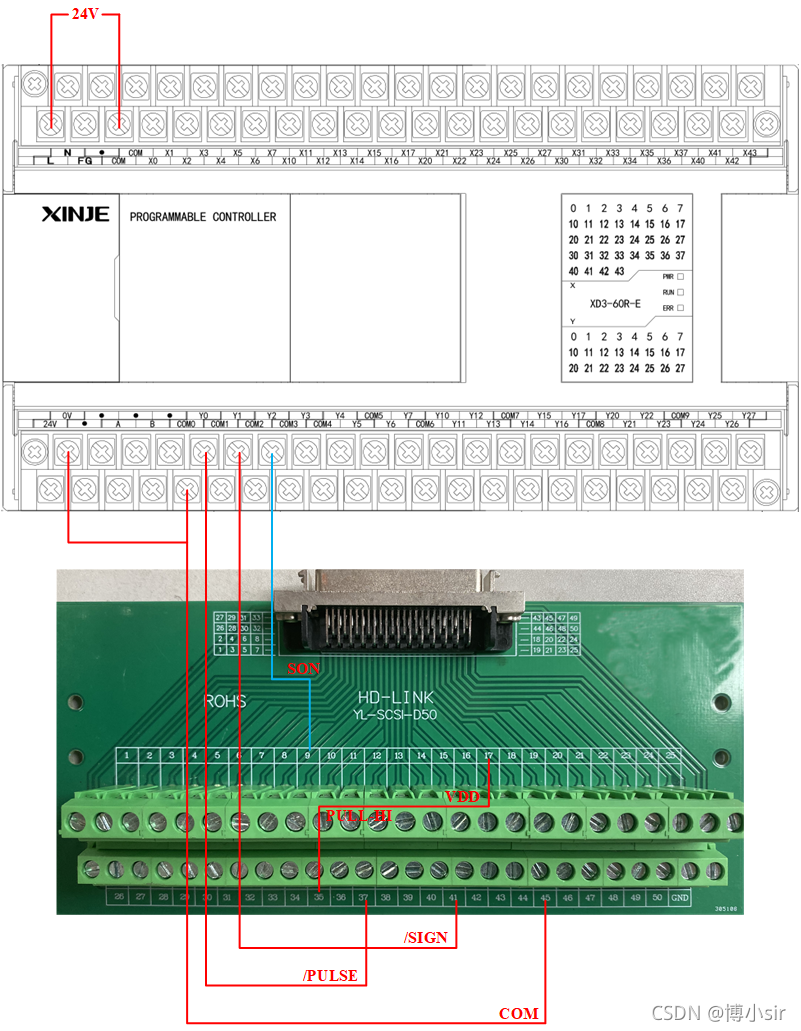
图10
上述接线仅能够实现对伺服电机的开环控制,但是对伺服电机的控制策略更多情况下会采用闭环控制,上位控制器还需要得到伺服电机的位置信息。本案例我们可利用PLC的高速计数输入端子来接收伺服驱动器反馈的脉冲信号进而得到位置信息,不过这里则存在一些棘手的问题,下面慢慢展开。
查找PLC用户手册,我们可以得到PLC的高速计数端口定义,如图11所示,本案例中,将PLC的X0和X1作为A、B两相集电极信号的输入端口,在一些精度要求很高的场合才会用到Z相信号,一般的使用场景下可以忽略。由图12可知信捷这款PLC的高速计数端口只能接受DC24V集电极开路的编码器输入。而根据图6的CN1端子的管脚定义可知台达的这款伺服驱动器只能输出A、B、Z三相差分的信号,而且经过测量,信号电压只有5V,因此不能直接作为PLC的输入信号,所以这里我们需要一个伺服差分转集电极的信号转换模块。
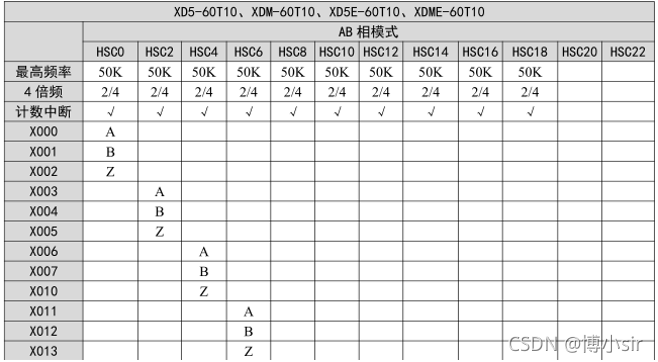
图11(此处为简洁篇幅,省略部分端口)
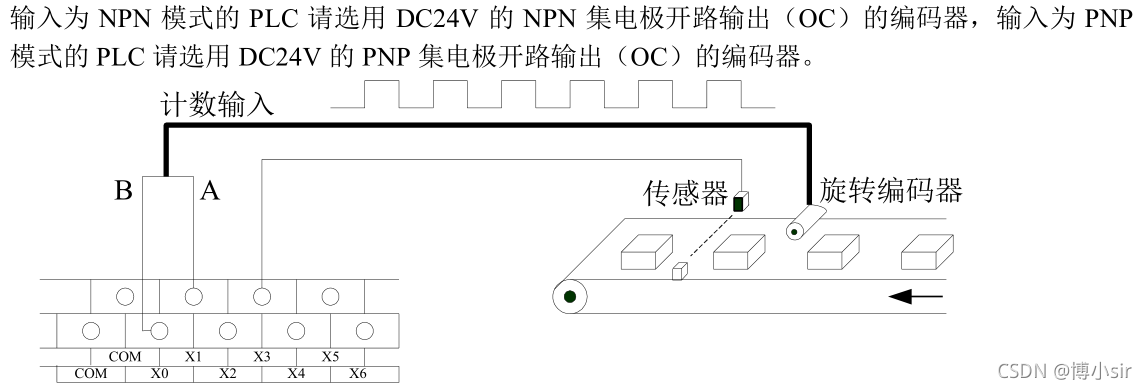
图12
信号转换模块的作用是将5V的差分信号转换为24V的集电极开路信号,主要是通过高速光耦的电平转换来实现的。该模块同样可以在淘宝上买到,搜索建议:差分转集电极。在这里贴一张信号转换模块的实物图,附有管脚定义。

图13
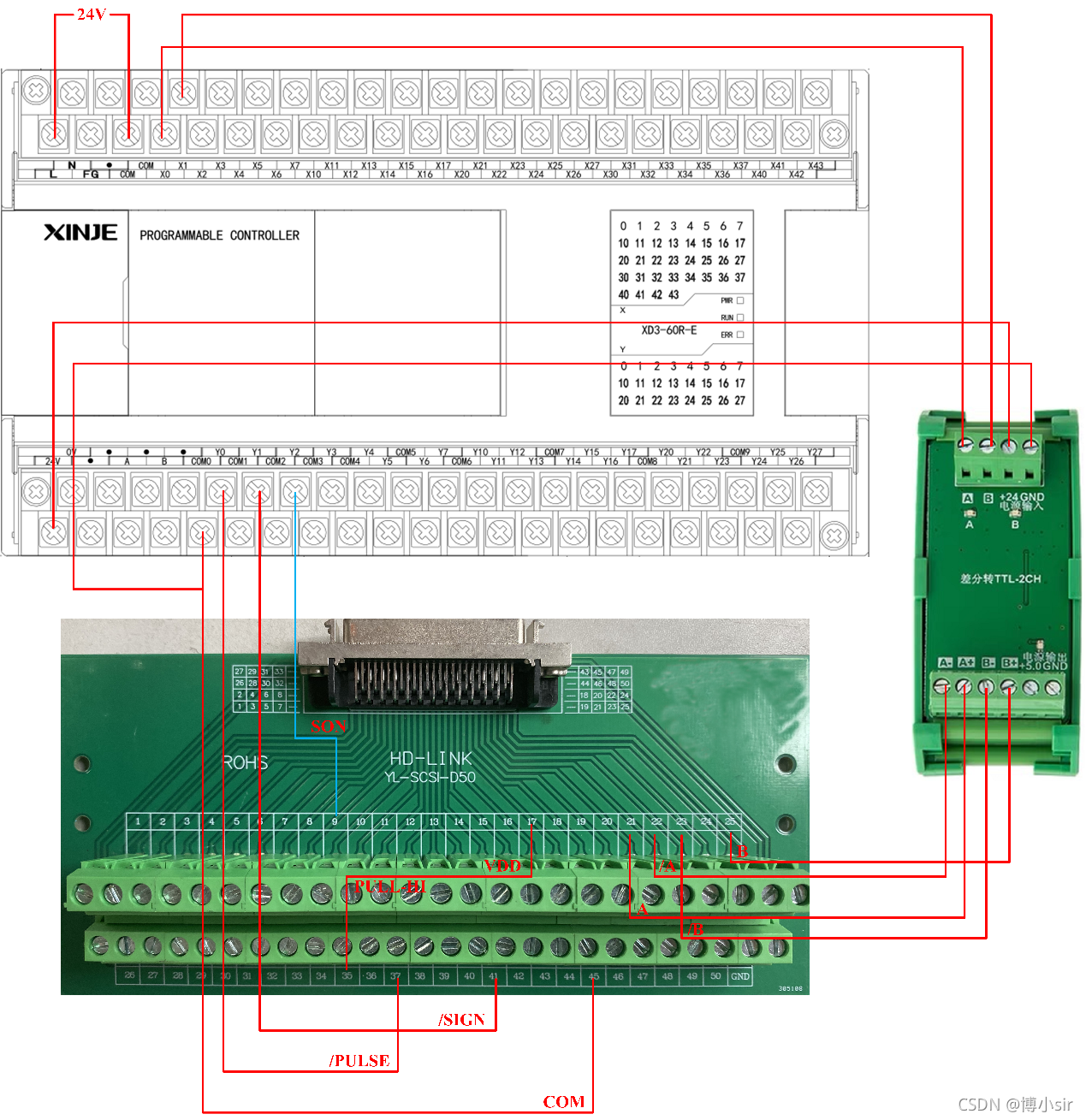
这样,伺服驱动器的编码器输出信号经过差分转集电极的信号转换模块后再接入PLC,即可成功实现编码器反馈数据的读取。实测该模块效果十分稳定,基本没有丢脉冲的情况。综上接线,信捷XDM-60T10-E这款PLC便能够对台达ASDA-AB伺服驱动器进行闭环控制,完整接线图如图14所示。
本帖完结,后面有时间会补充使用信捷的同款PLC输出AB相脉冲控制脉冲型伺服驱动器的接线方法,敬请期待。
参考手册:
[1] 台达ASDA-AB系列进阶泛用型伺服驱动器应用技术手册 -2010.05.11
[2] XD、XL系列可编程序控制器用户手册(硬件篇)-2021.8.10
[3] XD、XL系列可编程控制器用户手册(基本指令篇)-2021.8.6
[4] XD、XL系列可编程控制器用户手册(定位控制篇)-2021.8.9