简介:通过STK的连接模块(connectors),实现STK与应用程序Matlab的交互。单独一方干不成或难度大,通过互联可充分发挥STK与第三方应用程序各自的优势。STK与Matlab互联是两个强大成熟商业软件的强强联合。STK提供超过200个Matlab格式化过封装好的命令。这些接口函数能够大大提升编程效率。
STK强项:轨道计算功能丰富、 可靠。
STK弱项:STK自身无法通过编程实现对某些复杂航天任务的仿真分析。例如:循环计算、 复杂的嵌套迭代、 复杂的收敛判据。
Matlab强项:使用便捷、 能编程实现复杂逻辑。
Matlab弱项:没有天生的轨道计算能力。
一、本博客的MATLAB与STK互联实例任务:
背景:给定一个四颗卫星组成的星座,计算分析两天时间内该星座对全球每一点的最大重访时间。
任务:计算星座对地面点的最大重访时间。
二、直接上结果图:
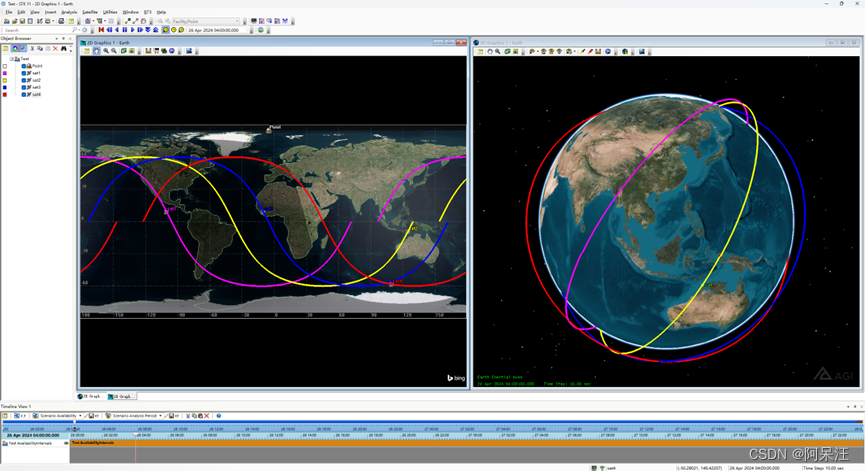
1. 该动图为MATLAB与STK互联的直观显示,MATLAB运行程序后,与STK建立connectors,自动打开STK工程,并自动建立对应场景,通过遍历地球表面地面站,计算重访时间,循环得到两天时间内该星座对全球每一点的最大重访时间。

2. 下图为MATLAB显示的waitbar,可以自动显示循环进度以及预计剩余时间。
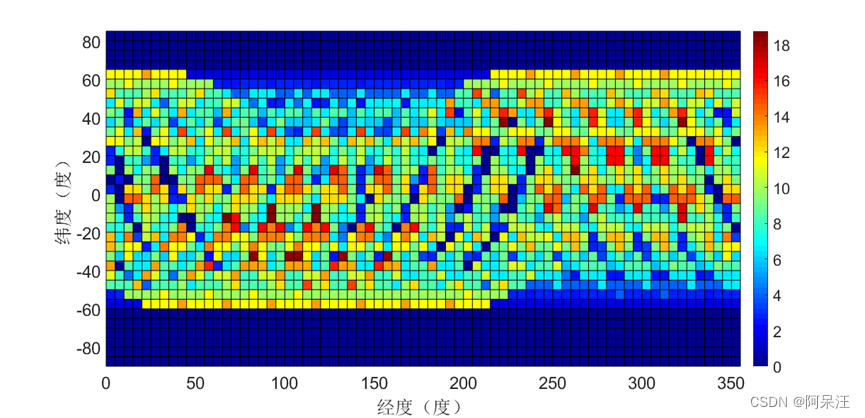
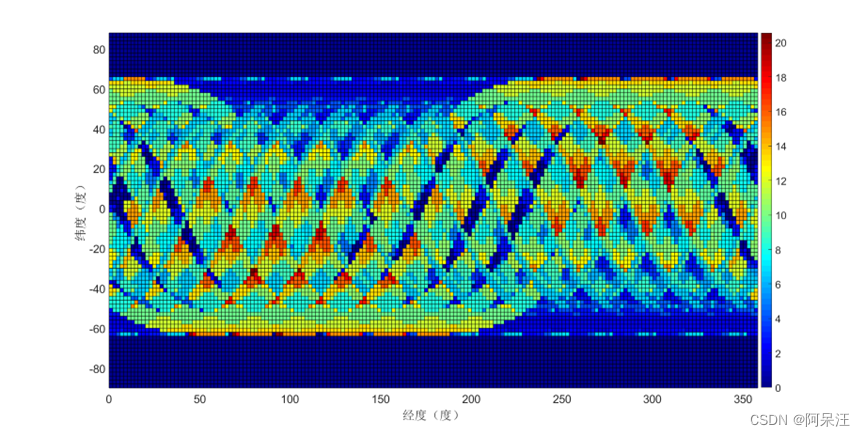
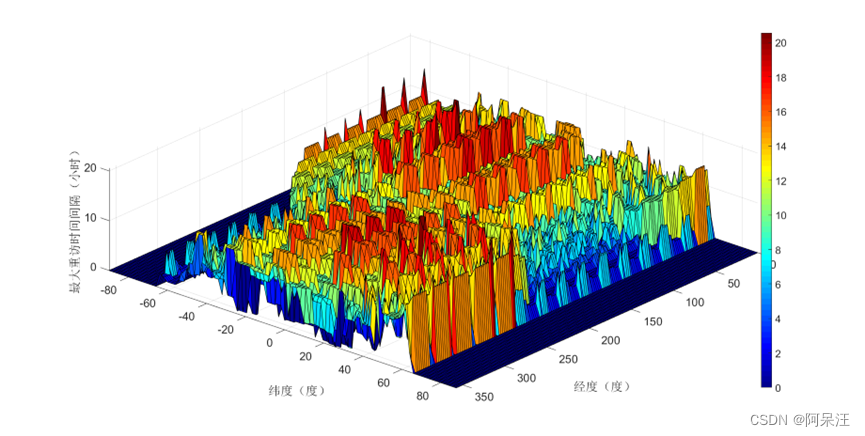
3. 下图为四星星座对全球每一点的最大重访时间二维图以及三维图。纬度变化范围为:-90°~90°;经度的变化范围为:0°~360°。
步进角度为5度的结果:

步进角度为2度的结果:
三、MATLAB与STK互联步骤
MATLAB与STK互联主要可以通过电脑串口COM或者STK的connectors链接器进行互联。本文主要介绍connection链接器方法。该部分已经有很多博主进行分享,本博客进行简要介绍。建议先安装MATLAB2018b,再安装STK11.6。这两个版本的软件能够自动建立connectors,完成软件的互联。
1. 软件版本截图:


2. 链接connection步骤:(注意:前提是已经安装好MATLAB2018b)
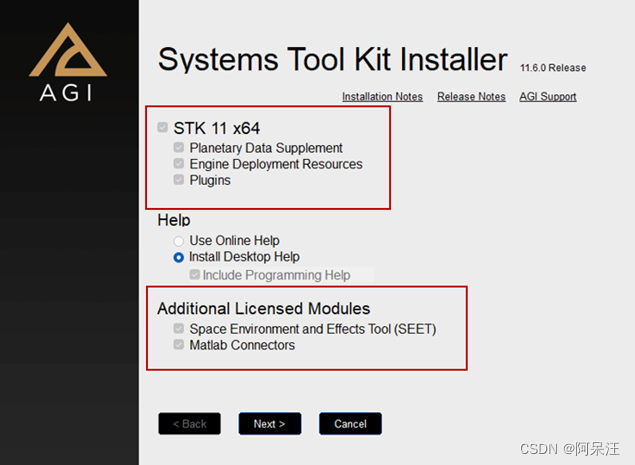
① 以管理员身份打开STK11.6的install.exe。界面如下:
红色框内选项全部勾选,由于我电脑已经安装好了STK11.6,因此我的红色框内选项是灰色的,没有安装STK11.6的电脑是可以勾选的。
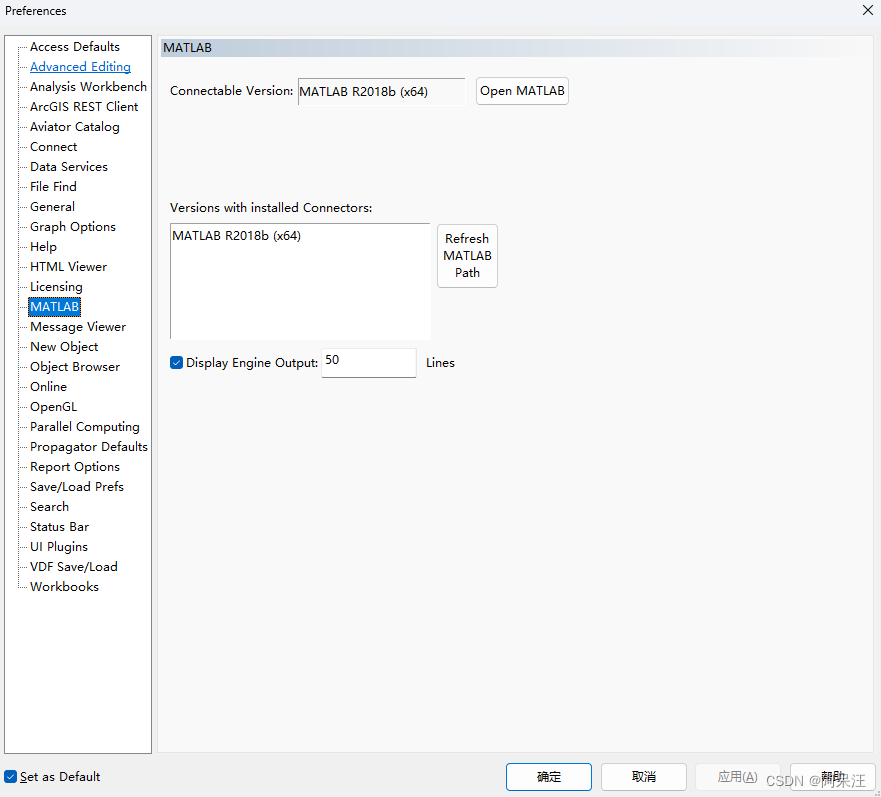
② 安装好STK11.6后,打开STK,查看STK和Matlab互联连接器connectors的状态。点击STK菜单栏的edit选项卡,继续点击Preferences,可以看到与STK连接的MATLAB版本,下图代表STK与MATLAB互联完成。
③ 然后再打开MATLAB,输入stkInit(区分大小写),对STK的连接进行初始化,可以看到如下提示,这就表示MATLAB已经与STK进行连接,此后就可以利用MATLAB对STK进行编程。

3. 航天应用常用接口函数的使用。
① 初始化需要的接口函数
stkInit—— 完成STK和Matlab的互联
conid=stkOpen(stkDefaultHost); —— 返回互联成功的主机端口的连接句柄
② 初始窗口管理
if stkValidScen == 1
stkUnload('/*')
end —— 如果已经有打开的场景,则关闭场景。
③ 建立场景
stkNewObj('/','Scenario','场景名称'); —— 建立给定名称的场景。
stkSetTimePeriod('10 Apr 2024 00:00:00.0','12 Apr 2024 00:00:00.0','GREGUTC');
—— 设置场景的起止时间和采用的时间系统。
stkSetEpoch('10 Apr 2024 00:00:00.0','GREGUTC'); —— 设置场景的历元。
stkSyncEpoch; —— 同步aeroToolbox和STK场景历元。
rtn = stkConnect(conid,'Animate','Scenario/场景名称','SetValues "10 Apr 2024
00:00:00.0" 60 0.1'); —— 设置STK场景动画历元。
rtn = stkConnect(conid,‘Animate’,‘Scenario/场景名称’,‘Reset’); —— 设置动画时
间复位。
④ 建立航天器
stkNewObj('*/','Satellite','航天器名称'); —— 建立卫星。
stkSetPropClassical('objPath', 'propagator', 'coordSystem', tStart, tStop, dt,
orbitEpoch, semimajorAxis, eccentricity,inclination, argOfPerigee, RAAN,
meanAnomaly, coordEpoch)
⑤ 关闭连接
stkClose(conid);
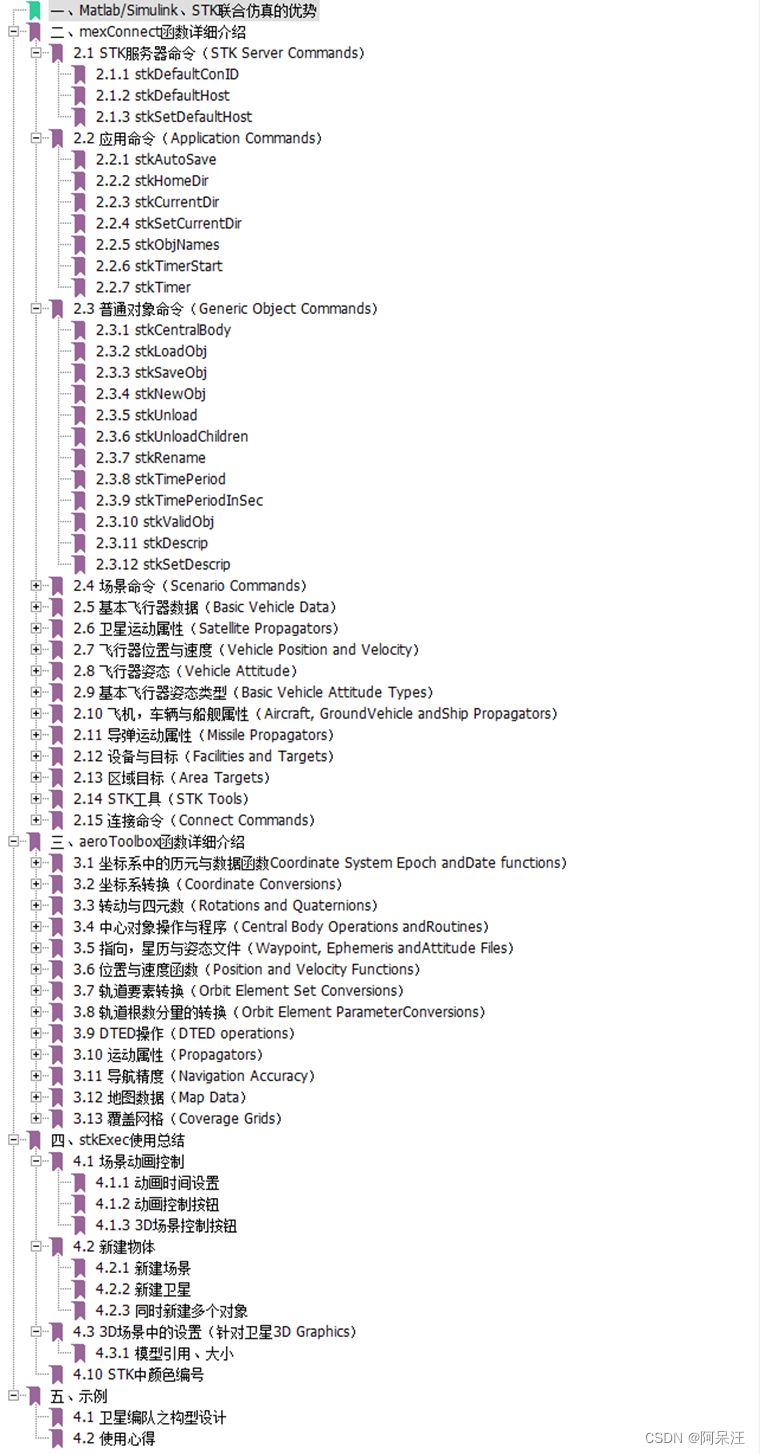
4. 所有STK与MATLAB互联语法如下PDF显示:
四、MATLAB与STK互联主要代码如下,如有代码问题,请加V(Lucky_YQW)交流。
clcclear allclose allstkClose('ALL')%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%计算星座对地面点的最大重访时间%详细背景:给定一个星座,计算分析两天时间内该星座对全球每一点的最大重访时间。%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%%% 互联stkInit; % 建立连接conid=stkOpen; % 得到连接句柄(用于发送指令)delete(get(0,'children')); % 关闭其他绘图窗口scen_open = stkValidScen; % 如果有已打开的场景,则自动关闭if scen_open == 1 stkUnload('/*');end%% 建立场景% 新建场景stkNewObj('/','Scenario','Test');% 设定时间stkSetTimePeriod('26 Apr 2024 00:00:00.00','28 Apr 2024 00:00:00.00','GREGUTC');% 使aeroToolbox中函数的历元时间与场景一致stkSetEpoch('26 Apr 2024 00:00:00.00','GREGUTC');stkSyncEpoch;%% 新建四颗卫星stkNewObj('*/','Satellite','sat1');stkNewObj('*/','Satellite','sat2');stkNewObj('*/','Satellite','sat3');stkNewObj('*/','Satellite','sat4');% 设置起止时间、历元时刻、积分步长t_start=0;t_stop=1*(24*3600); % 两天的时间dt=60;orbitEpoch=t_start;% 基准星轨道根数a_MB=7000*1000;e_MB=0;i_MB=60*pi/180;w_MB=0*pi/180;Raan_MB=0*pi/180;M_MB=0*pi/180;% 输入并积分星座轨道stkSetPropClassical('*/Satellite/sat1','J2Perturbation','J2000',t_start,t_stop,dt,orbitEpoch,a_MB,e_MB,i_MB,w_MB,Raan_MB,M_MB);stkPropagate('*/Satellite/sat1', t_start, t_stop)stkSetPropClassical('*/Satellite/sat2','J2Perturbation','J2000',t_start,t_stop,dt,orbitEpoch,a_MB,e_MB,i_MB,w_MB,Raan_MB+pi/4,M_MB+pi);stkPropagate('*/Satellite/sat2', t_start, t_stop)stkSetPropClassical('*/Satellite/sat3','J2Perturbation','J2000',t_start,t_stop,dt,orbitEpoch,a_MB,e_MB,i_MB,w_MB,Raan_MB+pi/2,M_MB+2*pi);stkPropagate('*/Satellite/sat3', t_start, t_stop)stkSetPropClassical('*/Satellite/sat4','J2Perturbation','J2000',t_start,t_stop,dt,orbitEpoch,a_MB,e_MB,i_MB,w_MB,Raan_MB+3*pi/4,M_MB+pi/2);stkPropagate('*/Satellite/sat4', t_start, t_stop);%% 建立地面站,循环计算不同位置的最大重访时间% 新建地面站stkNewObj('*/','Facility','Point'); % Phi; Lamda 分别是纬度,经度,纬度变化范围是-90到90度,经度0-360度% 地面站参数% 经度参数Lamda_min = 0;delta_Lamda = 5;n_Lamda = 360/delta_Lamda;% 纬度参数Phi_min = -90;delta_Phi = 5;n_Phi = 180/delta_Phi;% 循环计算h=waitbar(0,'开始地面站扫描');for i=1:n_Lamda for j=1:n_Phi tic % 设置地面站经纬度坐标 namda = (Lamda_min+(i-1)*delta_Lamda)/180*pi; X(i,j)=namda/pi*180; phi = (Phi_min+(j-1)*delta_Phi)/180*pi; Y(i,j)=phi/pi*180; stkSetFacPosLLA('Scenario/Test/Facility/Point',[phi; namda; 0]); % 根据对地观测需求设置地面点最低跟踪仰角 stkConnect(conid,'SetConstraint','Scenario/Test/Facility/Point','ElevationAngle Min 50'); %计算各星访问时间 %%%%%%%%%%%%%此处省略%%%%%%%%%%% % 计算最大重访时间,直至循环结束 temp=0; if size(interval1)==[0 0] & size(interval2)==[0 0] & size(interval3)==[0 0] & size(interval4)==[0 0] Z(i,j)=0; else if size(interval1)~=[0 0] temp=[temp,interval1.start,interval1.stop]; end if size(interval2)~=[0 0] temp=[temp,interval2.start,interval2.stop]; end if size(interval3)~=[0 0] temp=[temp,interval3.start,interval3.stop]; end if size(interval4)~=[0 0] temp=[temp,interval4.start,interval4.stop]; end %%%%%%%%%%%%%此处省略%%%%%%%%%%% end toc flag_num = (i-1) * n_Phi + j; if i == 1 && j == 1 per_time = toc; end time_remain = per_time * (n_Lamda*n_Phi - flag_num); str=['扫描进度:',num2str(100*flag_num/n_Lamda/n_Phi),'%',' 预估剩余时间:',num2str(time_remain),'秒']; waitbar(flag_num/n_Lamda/n_Phi,h,str); endenddelete(h); %close(h)save('res_inteval_5.mat','X','Y','Z');figuresurf(X,Y,Z);xlabel('经度(度)');ylabel('纬度(度)');zlabel('最大重访时间间隔(小时)');colorbarxlim([0 355]);ylim([-90 85]);%% 关闭连接stkClose(conid);