电机调参
- 一、电机相关
- 0、废话
- 1、电机种类
- 2、电机控制方式
- 二、电机控制器
- 1、PID控制器
- 2、PID 各环节作用
- 3、PID 种类
- 三、电机调参
- 1、Tmotor 调参
- 1.1 控制框图
- 1.2 PID 程序
- 1.3 Tmotor 控制的完整程序
- 1.4 PID 调试技巧
- 2、M2006(M3508)调参
- 2.1 M2006(M3508)控制框图
- 2.2 M2006与M3508 完整的控制程序
- 2.3 调试技巧
- 四、存在的问题
一、电机相关
电机作为一种能将电能转化为机械能的装置,其在制造、医疗、运动控制等等许多地方都起着重要的作用。想学习了解机器人的小伙伴,从电机了解起走也是一条不错(坎坷)的道路。
0、废话
其实电机对于我来说是接触的比较多了的,记得小时候玩四驱车,就特意将“马达”拆开来看过想搞懂原理,也单独将电机拿出来制作了一些小的diy,后来到了高中在学到了电磁学,算是了解了基础的原理了(在不停的刷题后),再后来到大学就是真正的使用了。第一次使用应该是在大一买的单片机,配了一个电机,有程序可以进行调速,但当时由于一些原因,没有再去使用。又到了大三,学习了电机拖动,对电机的认识又深了一点,也做了一些关于电机的实验。但是,令我难以忘记的是研究生开始调试电机的时候,真的是…一言难尽,之前也参考过许多大佬的博客,所以想把自己的这段难忘的经历做个总结,也给有需要的朋友一个参考。
1、电机种类
-
按电源种类分为:直流电机和交流电机。我们常见常用的电机大多是直流电机,相比前者,交流电机不需要换向器和电刷转换电流方向,与直流电机相比它的结构更简单,功率更大,在工业领域被广泛应用
-
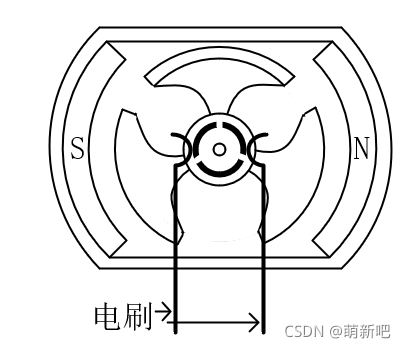
根据有无电刷分为:有刷电机和无刷电机。有刷电机结构简单、开发久技术成熟、响应速度快,起动扭矩大、运行平稳,起制动效果好、控制精度高、使用成本低,维修方便;而无刷电机由于无电刷,具有低干扰、噪音低、运转顺畅、寿命长、低维护成本等优点。于是我接触的以无刷电机为主。
-
根据有无反馈分为:步进电机和伺服电机。前者没有反馈信号,位置精度不够高,且转速远远小于后者。在需要精确的控制,伺服电机更加常用。
|

|
2、电机控制方式
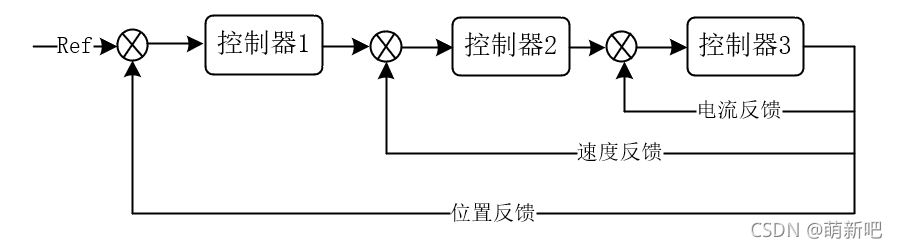
- 力矩控制:指定电机提供设置大小的力矩。(但是由于力矩传感器太贵了,这里的力矩的大小通常是通过电流换算的,其恒电流情况下,转矩=转矩常数*电流)
- 速度控制:指定电机达到设置的速度转动。
- 位置控制:指定电机转动到设置的位置。
由于位置是速度的积分,所以三种控制方式的控制框图是有要求的,下面是一种常见的控制结构图,当然,如果只针对某一两种控制模式,其控制方案将比这个更加简易。
二、电机控制器
为了方便用户的使用,市面上许多电机都是针对上面的控制方式进行了封装的,也就是我们常听说的——控制器。控制器的控制方案有许多,针对不同的控制环也有不同的控制方案,例如:对于电流环,有FOC矢量控制,速度、位置环有PID。当然,也有其他的控制算法,但这里我们就使用常用的就行了。现在我们也可以开始谈谈标题了。
1、PID控制器
PID 是一种传统且经典的控制算法,在工程中应用非常广泛,相比其他高大上甚至只存在于 paper 上的算法, PID 是非常接地气的。
PID ,即:Proportional(比例)、Integral(积分)、Differential(微分)的缩写。顾名思义,PID 控制算法是结合比例、积分和微分的融合怪,其规律可以描述为:
u
(
t
)
=
K
p
(
e
(
t
)
+
1
T
t
∫
0
t
e
(
t
)
d
t
+
T
d
d
e
(
t
)
d
t
u(t)=K_p(e(t)+\frac{1}{T_t}\int_0^t e(t)dt+T_d\frac{de(t)}{dt}
u(t)=Kp(e(t)+Tt1∫0te(t)dt+Tddtde(t)
其中
K
p
K_p
Kp 是比例增益,
T
t
T_t
Tt 是积分时间常数,
T
d
T_d
Td 是微分时间常数,
u
(
t
)
u(t)
u(t) 是输入信号,
e
(
t
)
e(t)
e(t) 是误差。
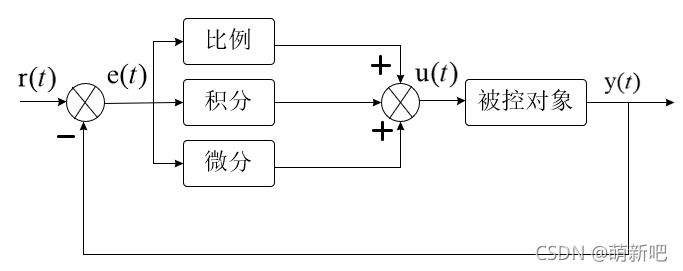
三个环节在控制中也分别起着不同的控制作用。
2、PID 各环节作用
-
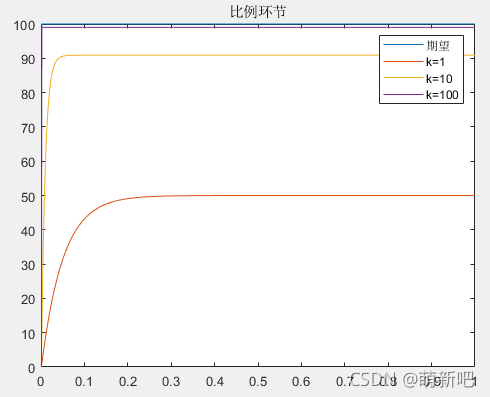
比例环节 P:比例环节与稳态误差相关,比例环节越大,上升速度越快,且稳态误差越小,但无论怎样多大都会存在误差,不能消除误差,而且过大还会导致震荡,反而不稳定
-
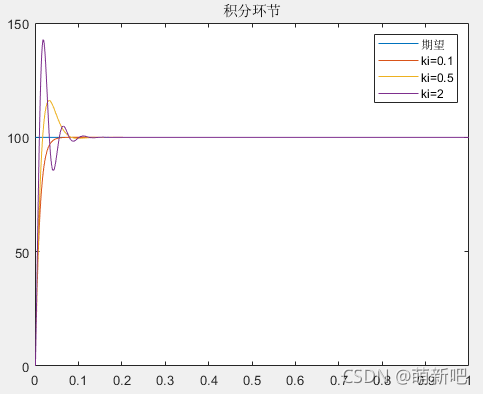
积分环节 I:积分环节则可以消除误差,合适的积分环节可以很快的消除误差,但是设置较大会产生超调,并且过大也会导致震荡,从而不稳定
-
微分环节 D:微分环节具有预测作用,可以预测信号的变化方向,从而可以减小超调,提高响应速度,但过大会导致系统不稳定

matlab PID 的参考代码如下(上面的图是在下面代码基础上修改了一点,但是核心没有变):
%% 说明
% 被控系统: 1/(0.1s+1)
% 控制器: PID
%%
clc,clear
ts=0.001; %采样时间=0.001s
sys=tf(1,[0.1,1]); %建立被控对象传递函数
dsys=c2d(sys,ts,'z') % 离散化
[num,den]=tfdata(dsys,'v'); % 得到差分方程系数 y(k) = -den[2]*y(k-1) + num[2]*u(k-1)
e_last=0; %前一时刻的偏差
E_integ=0; %累积偏差
u_last=0.0; %前一时刻的控制量
y_last=0; %前一时刻的输出
% PID参数
kp=1;
ki=0;
kd=0;
u=zeros(1,10000); %设置仿真长度
time=zeros(1,10000); %时刻点(设定10000个)
for k=1:1:10000
time(k)=k*ts; %时间
r(k)=100; %期望值
y(k)=-1*den(2)*y_last + num(2)*u_last; %系统响应输出序列
e(k)=r(k)-y(k); %误差信号
u(k)=kp*e(k)+ki*E_integ+kd*(e(k)-e_last); %系统PID控制器输出序列
E_integ=E_integ+e(k); %误差的累加和
u_last=u(k); %前一个的控制器输出值
y_last=y(k); %前一个的系统响应输出值
e_last=e(k); %前一个误差信号的值
end
p1=plot(time,r,'-.');xlim([0,1]);hold on; %指令信号的曲线(即期望输入)
p2=plot(time,y,'--');xlim([0,1]); %不含积分分离的PID曲线
hold on;
3、PID 种类
上面的 PID公示 是针对连续情况下的,而在生活中,我们常常使用的是离散型的变量,比如时间,于是我们需要将 PID 的公式进行离散化,根据离散化的方法不同,PID 控制的公式就有两种,即位置式 PID 和增量式 PID,
- 位置式 PID
u ( n ) = K p ∗ e ( n ) + K i ∗ ∑ e ( n ) + K d ∗ [ e ( n ) − e ( n − 1 ) ] / T u(n)=K_p*e(n)+K_i*\sum e(n)+K_d*[e(n)-e(n-1)]/T u(n)=Kp∗e(n)+Ki∗∑e(n)+Kd∗[e(n)−e(n−1)]/T
从公式结构上看,位置式存在积分环节,误差会进行累加,当积分项饱和时,误差仍然会进行累加,当误差反向变化时,系统还需要一定时间从饱和区退出,所以常常需要积分限幅和输出限幅,实际使用位置式 pid 时一般常常使用 PD 进行控制。 - 增量式 PID
Δ u ( n ) = K p ∗ [ e ( n ) − e ( n − 1 ) ] + K i ∗ e ( n ) + K d ∗ [ e ( n ) − 2 ∗ e ( n − 1 ) + e ( n − 2 ) ] / T \Delta u(n)=K_p*[e(n)-e(n-1)]+K_i* e(n)+K_d*[e(n)-2*e(n-1)+e(n-2)]/T Δu(n)=Kp∗[e(n)−e(n−1)]+Ki∗e(n)+Kd∗[e(n)−2∗e(n−1)+e(n−2)]/T
增量式不包含积分环节,控制增量只与前后三次测量值有关,对外界的抗扰性比位置式更好。 - 两者关系
可以看到前者计算得到的是输入量,而后者算得的是输入增量,许多同学可能已经猜到了后者就是前者差分得到的
想更加具体的了解两者关系,可以看这位博主的: 传送门.
三、电机调参
常见的调参方式是比较快乐的,直接在生产商写好的驱动下进行参数的设置以及测试,找到合适的参数,更有的还有调参软件,遍历参数寻找合适的参数,从而省去人工调试的复杂环节。
但这里想要分享的调参方法要多一点步骤,但是大体方向是不变的,这里以 Tmotor 的 AK10-9 与 大疆的 M2006 两款无刷直流电机为例子进行介绍。
1、Tmotor 调参
Tmotor 的电机本来是有调参软件的,但是最开始的时候由于资料不完善,加上他的控制环不符合我们的应用要求,所以我们需要进行简单的修改。
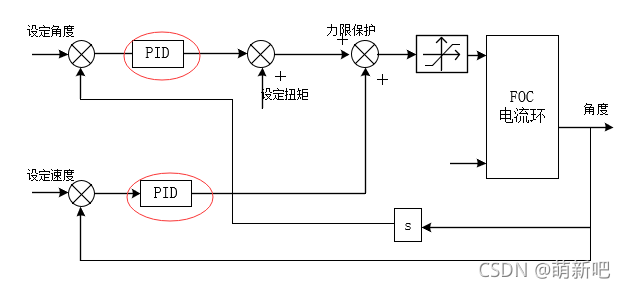
1.1 控制框图
Tmotor 的运动控制框图如下,可以看到他的电流环采用 FOC 矢量控制,我们不能修改,另外两个环,速度环和位置环,只有比例环节,不能达到无误差的目标,所以我们需要在他的电流环上进行编写封装。
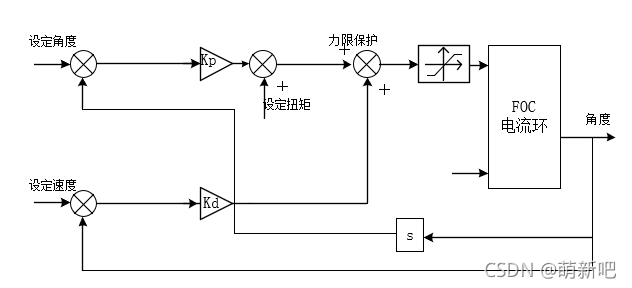
我们需要的控制环应该如下:
下面我们先编写控制程序。
1.2 PID 程序
之前探讨过离散 PID 有位置式 PID 算法和增量式 PID 算法,下面是根据其公式编写的 PID 程序,在使用之前需要稍稍修改一下参数。
位置式 PID
********************位置式 PID**************************
*** 输入参数:电机电流速度位置等反馈值fed ***
********************************************************
typedef struct PID
{
float target; //目标参考值
float deadband; //定义电机死区
float err_now; //定义当前误差
float err_last; //定义上一时刻误差
float kp; //比例环节系数
float ki; //积分环节系数
float kd; //微分环节系数,这里已将时间常数包含进去
float Pout; //比例环节输出
float Iout; //积分环节输出
float Dout; //微分环节输出
float IntegLimt; //设置积分限幅
float output; //输出量
float OutputLimt;//输出限幅
}PID_PARM;
//初始化PID参数的函数
void PID_parm_Init(PID_PARM *PID_parm,float target,float kp,float ki,float kd,float IntegLimt,float OutputLimt)
{
PID_parm->target = target;
PID_parm->err_now = 0;
PID_parm->err_last = 0;
PID_parm->kp = kp;
PID_parm->ki = ki;
PID_parm->kd = kd;
PID_parm->Pout = 0;
PID_parm->Iout = 0;
PID_parm->Dout = 0;
PID_parm->IntegLimt = IntegLimt;
PID_parm->output = 0;
PID_parm->OutputLimt = OutputLimt;
}
//计算PID的函数
float PID_cal(PID_PARM *pid_parm,float feedback)
{
pid_parm->err_now = pid_parm->target - feedback;
pid_parm->Pout = pid_parm->kp*pid_parm->err_now;
pid_parm->Iout += pid_parm->ki*pid_parm->err_now;
pid_parm->Dout = pid_parm->kd*(pid_parm->err_now-pid_parm->err_last);
//积分限幅
if(pid_parm->Iout > pid_parm->IntegLimt) pid_parm->Iout = pid_parm->IntegLimt;
else if(pid_parm->Iout < -pid_parm->IntegLimt) pid_parm->Iout = -pid_parm->IntegLimt;
//输出限幅
pid_parm->output = pid_parm->Pout + pid_parm->Iout + pid_parm->Dout;
if(pid_parm->output > pid_parm->OutputLimt) pid_parm->output = pid_parm->OutputLimt;
else if(pid_parm->output < -pid_parm->OutputLimt) pid_parm->output = -pid_parm->OutputLimt;
//数据更新
pid_parm->err_last = pid_parm->err_now;
return pid_parm->output;
}
float u;
PID_PARM pid_parm;
PID_parm_Init(&pid_parm,10,1,0.1,,0.5,50,100); //这里的参数随机给的,具体参数需要调节
u = PID_cal(&pid_parm,fed); //计算出来的下一次输入
增量式 PID
********************增量式 PID**************************
*** 输入参数:电机电流速度位置等反馈值fed ***
********************************************************
typedef struct PID
{
float target; //目标参考值
float deadband; //定义电机死区
float err_now; //定义当前误差
float err_last; //定义上一时刻误差
float err_llast; //定义上上时刻误差
float kp; //比例环节系数
float ki; //积分环节系数
float kd; //微分环节系数,这里已将时间常数包含进去
float Pout; //比例环节输出
float Iout; //积分环节输出
float Dout; //微分环节输出
float output; //输出增量
float output_last; //上一次输出的增量
float OutputLimt; //输出限幅
}PID_PARM;
//初始化PID参数的函数
void PID_parm_Init(PID_PARM *PID_parm,float target,float kp,float ki,float kd,float OutputLimt)
{
PID_parm->target = target;
PID_parm->err_now = 0;
PID_parm->err_last = 0;
PID_parm->err_llast = 0;
PID_parm->kp = kp;
PID_parm->ki = ki;
PID_parm->kd = kd;
PID_parm->Pout = 0;
fPID_parm->Iout = 0;
PID_parm->Dout = 0;
PID_parm->output = 0;
PID_parm->output_last = 0;
PID_parm->OutputLimt = OutputLimt;
}
//计算PID的函数
float PID_cal(PID_PARM *pid_parm,float feedback)
{
pid_parm->err_now = pid_parm->target - feedback;
pid_parm->Pout = pid_parm->kp*(pid_parm->err_now - pid_parm->err_last);
pid_parm->Iout = pid_parm->ki*pid_parm->err_now;
pid_parm->Dout = pid_parm->kd*(pid_parm->err_now - 2*pid_parm->err_last + pid_parm->err_llast);
//输出限幅
pid_parm->output += pid_parm->Pout + pid_parm->Iout + pid_parm->Dout;
if(pid_parm->output > pid_parm->OutputLimt) pid_parm->output = pid_parm->OutputLimt;
else if(pid_parm->output < -pid_parm->OutputLimt) pid_parm->output = -pid_parm->OutputLimt;
//数据更新
pid_parm->err_llast = pid_parm->err_last;
pid_parm->err_last = pid_parm->err_now;
pid_parm->output_last = pid_parm->output;
return pid_parm->output;
}
float u;
PID_PARM pid_parm;
PID_parm_Init(&pid_parm,10,1,0.1,,0.5,100); //这里的参数随机给的,具体参数需要调节
u = PID_cal(&pid_parm,fed); //计算出来的下一次输入
1.3 Tmotor 控制的完整程序
这里采用的 stm32 进行控制的,工程文件全部在下面:
- 头文件们
key.h
#ifndef __KEY_H
#define __KEY_H
#include "sys.h"
/*下面的方式是通过直接操作库函数方式读取IO*/
#define KEY0 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_4) //PE4
#define KEY1 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_3) //PE3
#define KEY2 GPIO_ReadInputDataBit(GPIOE,GPIO_Pin_2) //PE2
#define WK_UP GPIO_ReadInputDataBit(GPIOA,GPIO_Pin_0) //PA0
#define KEY0_PRES 1
#define KEY1_PRES 2
#define KEY2_PRES 3
#define WKUP_PRES 4
void KEY_Init(void); //IO初始化
u8 KEY_Scan(u8); //按键扫描函数
#endif
can.h
#ifndef __CAN_H
#define __CAN_H
#include "sys.h"
void CAN1_Init(void);//CAN1初始化
u8 CAN1_Send_Msg(u8* msg); //发送数据
u8 CAN1_Receive_Msg(u8 *buf);
#endif
pid.h
#ifndef __PID_H
#define __PID_H
#include "sys.h"
#include "stdlib.h"
typedef struct PID
{
float target; //目标参考值
float deadband; //定义电机死区
float err_now; //定义当前误差
float err_last; //定义上一时刻误差
float err_llast; //定义上上时刻误差
float kp; //比例环节系数
float ki; //积分环节系数
float kd; //微分环节系数,这里已将时间常数包含进去
float Pout; //比例环节输出
float Iout; //积分环节输出
float Dout; //微分环节输出
float IntegLimt; //设置积分限幅
float output; //输出量
float output_last; //上一次输出的增量
float OutputLimt; //输出限幅
}PID_PARM;
void PID_parm_Init(PID_PARM *PID_parm,float target,float deadband,float kp,float ki,float kd,float IntegLimt,float OutputLimt);
float Pos_PID_cal(PID_PARM *pid_parm,float feedback);
float Inc_PID_cal(PID_PARM *pid_parm,float feedback);
void PID_init(PID_PARM *Spd_PID,PID_PARM *Pos_PID);
#endif
motor.h
#ifndef __MOTOR_H
#define __MOTOR_H
#include "sys.h"
#include "pid.h"
#define pi 3.1415926
#define P_MAX 12.5
#define P_MIN -12.5
#define V_MAX 46.57
#define V_MIN -46.57
#define KP_MAX 500
#define KP_MIN 0
#define KD_MAX 5
#define KD_MIN 0
#define T_MAX 54
#define T_MIN -54
extern u8 Tmotor_Mod_Buf[3][8];
typedef enum
{
Tmotor_Open = 0xfc,
Tmotor_Close = 0xfd,
Tmotor_SetZero = 0xfe,
}Tmotor_Mod;
typedef struct{
u8 id; // id
int16_t speed_rps; // rad/s
int16_t real_torque; // 反馈力矩
uint16_t angle; // 绝对角度
}Tmotor_measure_t;
extern Tmotor_measure_t TmotorData; // 保存Tmotor电机的状态
int float_to_uint(float x, float x_min, float x_max, int bits);
float uint_to_float(int x_int, float x_min, float x_max, int bits);
float limitf(float val, float min_val, float max_val);
void Tmotor_mod(u8 mod);
void get_Tmotor_measure(Tmotor_measure_t *ptr, CanRxMsg *Rxmsg);
u8 set_Tmotor_torque(float torque);
void Tmotor_Speed_Control(PID_PARM *PID_spd,float target);
void Tmotor_Position_Control(PID_PARM *PID_spd,PID_PARM *PID_pos,float target);
#endif
- 源文件们
key.c
#include "key.h"
#include "delay.h"
void KEY_Init(void)
{
GPIO_InitTypeDef GPIO_InitStructure;
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA|RCC_AHB1Periph_GPIOE, ENABLE);//使能GPIOE时钟
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_2|GPIO_Pin_3|GPIO_Pin_4; //KEY0 KEY1 KEY2对应引脚
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_IN;//普通输入模式
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100M
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOE, &GPIO_InitStructure);//初始化GPIOE2,3,4
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_0;//WK_UP对应引脚PA0
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_DOWN ;//下拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化GPIOA0
}
//按键处理函数
//返回按键值
//mode:0,不支持连续按;1,支持连续按;
//0,没有任何按键按下
//1,KEY0按下
//2,KEY1按下
//3,KEY2按下
//4,WKUP按下 WK_UP
//注意此函数有响应优先级,KEY0>KEY1>KEY2>WK_UP!!
u8 KEY_Scan(u8 mode)
{
static u8 key_up=1;//按键按松开标志
if(mode)key_up=1; //支持连按
if(key_up&&(KEY0==0||KEY1==0||KEY2==0||WK_UP==1))
{
delay_ms(10);//去抖动
key_up=0;
if(KEY0==0)return 1;
else if(KEY1==0)return 2;
else if(KEY2==0)return 3;
else if(WK_UP==1)return 4;
}else if(KEY0==1&&KEY1==1&&KEY2==1&&WK_UP==0)key_up=1;
return 0;// 无按键按下
}
can.c
#include "can.h"
#include "motor.h"
Tmotor_measure_t TmotorData;
void CAN1_Init()
{
u8 tsjw = CAN_SJW_1tq;
u8 tbs2 = CAN_BS2_4tq;
u8 tbs1 = CAN_BS1_2tq;
u16 brp = 6;
u8 mode = CAN_Mode_Normal; // 提前配置好波特率 这里是1000k
GPIO_InitTypeDef GPIO_InitStructure;
CAN_InitTypeDef CAN_InitStructure;
CAN_FilterInitTypeDef CAN_FilterInitStructure;
NVIC_InitTypeDef NVIC_InitStructure;
//使能相关时钟
RCC_AHB1PeriphClockCmd(RCC_AHB1Periph_GPIOA, ENABLE);//使能PORTA时钟
RCC_APB1PeriphClockCmd(RCC_APB1Periph_CAN1, ENABLE);//使能CAN1时钟
//初始化GPIO
GPIO_InitStructure.GPIO_Pin = GPIO_Pin_11| GPIO_Pin_12;
GPIO_InitStructure.GPIO_Mode = GPIO_Mode_AF;//复用功能
GPIO_InitStructure.GPIO_OType = GPIO_OType_PP;//推挽输出
GPIO_InitStructure.GPIO_Speed = GPIO_Speed_100MHz;//100MHz
GPIO_InitStructure.GPIO_PuPd = GPIO_PuPd_UP;//上拉
GPIO_Init(GPIOA, &GPIO_InitStructure);//初始化PA11,PA12
//引脚复用映射配置
GPIO_PinAFConfig(GPIOA,GPIO_PinSource11,GPIO_AF_CAN1); //GPIOA11复用为CAN1
GPIO_PinAFConfig(GPIOA,GPIO_PinSource12,GPIO_AF_CAN1); //GPIOA12复用为CAN1
//CAN单元设置
CAN_InitStructure.CAN_TTCM=DISABLE; //非时间触发通信模式
CAN_InitStructure.CAN_ABOM=ENABLE; //软件自动离线管理
CAN_InitStructure.CAN_AWUM=DISABLE;//睡眠模式通过软件唤醒(清除CAN->MCR的SLEEP位)
CAN_InitStructure.CAN_NART=ENABLE; //禁止报文自动传送
CAN_InitStructure.CAN_RFLM=DISABLE; //报文不锁定,新的覆盖旧的
CAN_InitStructure.CAN_TXFP=DISABLE; //优先级由报文标识符决定
CAN_InitStructure.CAN_Mode= mode; //模式设置
CAN_InitStructure.CAN_SJW=tsjw; //重新同步跳跃宽度(Tsjw)为tsjw+1个时间单位 CAN_SJW_1tq~CAN_SJW_4tq
CAN_InitStructure.CAN_BS1=tbs1; //Tbs1范围CAN_BS1_1tq ~CAN_BS1_16tq
CAN_InitStructure.CAN_BS2=tbs2;//Tbs2范围CAN_BS2_1tq ~ CAN_BS2_8tq
CAN_InitStructure.CAN_Prescaler=brp; //分频系数(Fdiv)为brp+1
CAN_Init(CAN1, &CAN_InitStructure); // 初始化CAN1
//配置过滤器
CAN_FilterInitStructure.CAN_FilterNumber=0; //过滤器0
CAN_FilterInitStructure.CAN_FilterMode=CAN_FilterMode_IdMask;
CAN_FilterInitStructure.CAN_FilterScale=CAN_FilterScale_32bit; //32位
CAN_FilterInitStructure.CAN_FilterIdHigh=0x0000;32位ID
CAN_FilterInitStructure.CAN_FilterIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterMaskIdHigh=0x0000;//32位MASK
CAN_FilterInitStructure.CAN_FilterMaskIdLow=0x0000;
CAN_FilterInitStructure.CAN_FilterFIFOAssignment=CAN_Filter_FIFO0;//过滤器0关联到FIFO0
CAN_FilterInitStructure.CAN_FilterActivation=ENABLE; //激活过滤器0
CAN_FilterInit(&CAN_FilterInitStructure);//滤波器初始化
CAN_ITConfig(CAN1,CAN_IT_FMP0,ENABLE);//FIFO0消息挂号中断允许.
NVIC_InitStructure.NVIC_IRQChannel = CAN1_RX0_IRQn;
NVIC_InitStructure.NVIC_IRQChannelPreemptionPriority = 0; // 主优先级为1
NVIC_InitStructure.NVIC_IRQChannelSubPriority = 2; // 次优先级为2
NVIC_InitStructure.NVIC_IRQChannelCmd = ENABLE;
NVIC_Init(&NVIC_InitStructure);
}
void CAN1_RX0_IRQHandler(void)
{
CanRxMsg RxMessage;
CAN_Receive(CAN1, 0, &RxMessage);
if(RxMessage.StdId == 0x00)
get_Tmotor_measure(&TmotorData, &RxMessage);
}
u8 CAN1_Send_Msg(u8* msg)
{
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
TxMessage.StdId=0x01;
TxMessage.ExtId=0x00;
TxMessage.IDE=0;
TxMessage.RTR=0;
TxMessage.DLC=8;
for(i=0;i<8;i++)
TxMessage.Data[i]=msg[i];
mbox= CAN_Transmit(CAN1, &TxMessage);
i=0;
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++;
if(i>=0XFFF)return 1;
return 0;
}
u8 CAN1_Receive_Msg(u8 *buf)
{
u8 i;
CanRxMsg RxMessage;
if( CAN_MessagePending(CAN1,CAN_FIFO0)==0)return 0; //没有接收到数据,直接退出
CAN_Receive(CAN1, CAN_FIFO0, &RxMessage);//读取数据
for(i=0;i<RxMessage.DLC;i++)
buf[i]=RxMessage.Data[i];
return RxMessage.DLC;
}
pid.c
#include "pid.h"
//初始化PID参数的函数
void PID_parm_Init(PID_PARM *PID_parm,float target,float deadband,float kp,float ki,float kd,float IntegLimt,float OutputLimt)
{
PID_parm->target = target;
PID_parm->deadband = deadband;
PID_parm->err_now = 0;
PID_parm->err_last = 0;
PID_parm->err_last = 0;
PID_parm->kp = kp;
PID_parm->ki = ki;
PID_parm->kd = kd;
PID_parm->Pout = 0;
PID_parm->Iout = 0;
PID_parm->Dout = 0;
PID_parm->IntegLimt = IntegLimt;
PID_parm->output = 0;
PID_parm->output_last = 0;
PID_parm->OutputLimt = OutputLimt;
}
//计算位置PID的函数
float Pos_PID_cal(PID_PARM *pid_parm,float feedback)
{
pid_parm->err_now = pid_parm->target - feedback;
pid_parm->Pout = pid_parm->kp*pid_parm->err_now;
pid_parm->Iout += pid_parm->ki*pid_parm->err_now;
pid_parm->Dout = pid_parm->kd*(pid_parm->err_now-pid_parm->err_last);
//积分限幅
if(pid_parm->Iout > pid_parm->IntegLimt) pid_parm->Iout = pid_parm->IntegLimt;
else if(pid_parm->Iout < -pid_parm->IntegLimt) pid_parm->Iout = -pid_parm->IntegLimt;
//输出限幅
pid_parm->output = pid_parm->Pout + pid_parm->Iout + pid_parm->Dout;
if(pid_parm->output > pid_parm->OutputLimt) pid_parm->output = pid_parm->OutputLimt;
else if(pid_parm->output < -pid_parm->OutputLimt) pid_parm->output = -pid_parm->OutputLimt;
//数据更新
pid_parm->err_last = pid_parm->err_now;
return pid_parm->output;
}
//计算增量PID的函数
float Inc_PID_cal(PID_PARM *pid_parm,float feedback)
{
pid_parm->err_now = pid_parm->target - feedback;
pid_parm->Pout = pid_parm->kp*(pid_parm->err_now - pid_parm->err_last);
pid_parm->Iout = pid_parm->ki*pid_parm->err_now;
pid_parm->Dout = pid_parm->kd*(pid_parm->err_now - 2*pid_parm->err_last + pid_parm->err_llast);
//输出限幅
pid_parm->output += pid_parm->Pout + pid_parm->Iout + pid_parm->Dout;
if(pid_parm->output > pid_parm->OutputLimt) pid_parm->output = pid_parm->OutputLimt;
else if(pid_parm->output < -pid_parm->OutputLimt) pid_parm->output = -pid_parm->OutputLimt;
//数据更新
pid_parm->err_llast = pid_parm->err_last;
pid_parm->err_last = pid_parm->err_now;
pid_parm->output_last = pid_parm->output;
return pid_parm->output;
}
//初始化PID参数
void PID_init(PID_PARM *Spd_PID,PID_PARM *Pos_PID)
{
PID_parm_Init(Pos_PID,0,0.1,0.6,0,2,180,200);
PID_parm_Init(Spd_PID,0,0.01,0.2,0.001,0,0.5,54);
}
motor.c
#include "delay.h"
#include "motor.h"
#include "usart.h"
#include "can.h"
#include "pid.h"
u8 Tmotor_Mod_Buf[3][8] =
{ //电机模式指令
{0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfc},
{0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfd},
{0xff,0xff,0xff,0xff,0xff,0xff,0xff,0xfe}
};
//数值转换函数/
/* /
float_to_uint: 浮点转整型 /
uint_to_float: 整形变浮点 /
limitf: 限幅函数 /
*/ /
///
int float_to_uint(float x, float x_min, float x_max, int bits)
{
float span = x_max - x_min;
float offset = x_min;
return (int) ( (x - offset) * ( (float) ((1<<bits) - 1)) / span);
}
float uint_to_float(int x_int, float x_min, float x_max, int bits)
{
float span = x_max - x_min;
float offset = x_min;
return ((float) x_int) * span / ((float) ((1<<bits) - 1)) + offset;
}
float limitf(float val, float min_val, float max_val)
{
float val_real = 0.0f;
if (val < min_val){
val_real = min_val;
return val_real;
}
else if (val > max_val){
val_real = max_val;
return val_real;
}
else{
val_real = val;
return val_real;
}
}
/Tmotor电机指令
/* /
Tmotor_mod: 设置电机模式(开、关、设置零点) /
get_Tmotor_measure: 获取电机的反馈数据(16进制的) /
set_Tmotor_torque: 设置电机力矩 /
*/ /
///
void Tmotor_mod(u8 mod)
{
switch(mod)
{
case Tmotor_Open:
CAN1_Send_Msg(Tmotor_Mod_Buf[0]);
break;
case Tmotor_Close:
set_Tmotor_torque(0.0f);
delay_ms(10);
CAN1_Send_Msg(Tmotor_Mod_Buf[1]);
break;
case Tmotor_SetZero:
CAN1_Send_Msg(Tmotor_Mod_Buf[2]);
break;
default:
break;
}
}
void get_Tmotor_measure(Tmotor_measure_t *ptr, CanRxMsg *Rxmsg)
{
ptr->id = Rxmsg->Data[0]; //电机id
ptr->angle = (uint16_t)(Rxmsg->Data[1]<<8 | Rxmsg->Data[2]); //电机位置
ptr->speed_rps = (uint16_t)(Rxmsg->Data[3]<<4 | Rxmsg->Data[4]>>4); //电机速度
ptr->real_torque = ((Rxmsg->Data[4]&0x0f)<<8 | Rxmsg->Data[5]); //电机力矩
}
u8 set_Tmotor_torque(float torque)
{
int p_int,v_int,kp_int,kd_int,t_int;
u8 mbox;
u16 i=0;
CanTxMsg TxMessage;
// 由于采用力矩模式,不使用位置和速度模式
kp_int = float_to_uint(0,KP_MIN,KP_MAX,12);
kd_int = float_to_uint(0,KD_MIN,KD_MAX,12);
p_int = float_to_uint(0,P_MIN,P_MAX,16);
v_int = float_to_uint(0,V_MIN,V_MAX,12);
// 真正需要设置的是力矩
t_int = float_to_uint(torque,T_MIN,T_MAX,12);
TxMessage.StdId=0x01; // 标准标识符为1
TxMessage.ExtId=0x12; // 设置扩展标示符(29位)这里不需要设置
TxMessage.IDE=0; // 使用扩展标识符
TxMessage.RTR=0; // 消息类型为数据帧,一帧8位
TxMessage.DLC=0x08; // 发送两帧信息
TxMessage.Data[0] = p_int>>8; //位置高8位
TxMessage.Data[1] = p_int&0xFF; //位置低8位
TxMessage.Data[2] = v_int>>4; //速度高8位
TxMessage.Data[3] = ((v_int&0xF)<<4)|(kp_int>>8); //速度低4位 KP高4位
TxMessage.Data[4] = kp_int&0xFF; //KP低8位
TxMessage.Data[5] = kd_int>>4; //KD高8位
TxMessage.Data[6] = ((kd_int&0xF)<<4)|(t_int>>8); //KP低4位 扭矩高4位
TxMessage.Data[7] = t_int&0xFF; //扭矩低8位
mbox= CAN_Transmit(CAN1, &TxMessage);
i=0;
while((CAN_TransmitStatus(CAN1, mbox)==CAN_TxStatus_Failed)&&(i<0XFFF))i++; //等待发送结束
if(i>=0XFFF)return 1;
return 0;
}
/Tmotor电机控制模式
/* /
Tmotor_Speed_Control: 速度控制 /
Tmotor_Postion_Control: 位置控制 /
*/ /
///
void Tmotor_Speed_Control(PID_PARM *PID_spd,float target)
{
// 需要先初始化pid参数
// 速度环采用单环即可
// spd单位rpm 所以将反馈的数据 *60/(2*pi)
float set_torque;
PID_spd->target = target;
set_torque = Inc_PID_cal(PID_spd,uint_to_float(TmotorData.speed_rps,V_MIN,V_MAX,12) * 60/(2*pi));
printf("v:%f\n",uint_to_float(TmotorData.speed_rps,V_MIN,V_MAX,12)* 60/(2*pi));
set_Tmotor_torque(set_torque);
}
void Tmotor_Position_Control(PID_PARM *PID_spd,PID_PARM *PID_pos,float target)
{
//位置控制模式需要设置双环
//采用速度内环和位置外环
//电机反馈的角度单位是rad,需要转换为°,所以*180.f/pi
float set_torque;
float set_spd;
PID_pos->target = target;
set_spd = Pos_PID_cal(PID_pos,uint_to_float(TmotorData.angle,P_MIN,P_MAX,16) * 180.f/pi);
printf("p:%f\n",uint_to_float(TmotorData.angle,P_MIN,P_MAX,16) * 180.f/pi);
set_torque = Inc_PID_cal(PID_spd,-set_spd);
set_Tmotor_torque(set_torque);
}
main.c
#include "sys.h"
#include "delay.h"
#include "usart.h"
#include "led.h"
#include "can.h"
#include "key.h"
#include "pid.h"
#include "motor.h"
int main(void)
{
u8 key;
u8 key_flag = 0;
u8 open_flag = 0;
float spd_target = 60;
float pos_target = 0;
PID_PARM PID_pos;
PID_PARM PID_spd;
//初始化相关基础模块
NVIC_PriorityGroupConfig(NVIC_PriorityGroup_2);//设置系统中断优先级分组2
CAN1_Init(); // 设置CAN波特率为1000k
delay_init(168); //初始化延时函数
LED_Init(); //初始化LED端口
KEY_Init();
uart_init(115200);
//初始化pid参数
PID_init(&PID_spd,&PID_pos);
//Tmotor_mod(Tmotor_Open);
LED0 = 0;
//按键控制电机模式
while(1)
{
key = KEY_Scan(0);
//printf("%d",key);
if(key)
{
switch(key)
{
case WKUP_PRES:
Tmotor_mod(Tmotor_Close);
open_flag = 0;
break;
case KEY0_PRES:
key_flag = 1;
pos_target += 10;
spd_target += 10;
break;
case KEY1_PRES:
Tmotor_mod(Tmotor_Open);
open_flag = 1;
break;
case KEY2_PRES:
key_flag = 0;
break;
}
}else delay_ms(10);
//当需要执行时
if(open_flag & key_flag)
{
Tmotor_Speed_Control(&PID_spd,spd_target);
//Tmotor_Position_Control(&PID_spd,&PID_pos,pos_target);
LED0 = ~LED0;
delay_ms(10);
}
//delay_ms(100);
}
return 0;
}
1.4 PID 调试技巧
PID 的调试是比较复杂的一个活,所以一般来说都会有调参软件的,当当当当~
这里当然没有了。。。
所以我们就只有采用手动试!
还有一点,我们现在考虑的是位置速度双闭环的系统,针对这个系统我们来进行调试。
在试之前,我们还需要了解的是,位置式 PID 是输出的位置量(不一定就是位置),常用在位置环(双环时),增量式 PID 是输出的增量,存在稳态误差,常用在内环。同时考虑到位置是速度积分量,所以需要将速度环放在内部,位置环放在外部,先调内环,再调外环,调试的时候,可以先固定微分和积分环节为零,不断的从小到大增大比例环节,在增大到电机抖动就说明不行了,得降低,下降到稳态误差比较小且电机不抖得情况下,尝试增加积分,一点点加,加到电机转动不抖动且稳态误差几乎消除时即可,一般情况下此时稳态误差还会存在,且会伴随着电机在目标值附近来回徘徊,或者出现电机出现超调,即输出值先一下子大于目标值后然后降低到目标值附近(徘徊),这时就需要添加微分环节了,可以消除这个超调哦。调试好内环后,按照同样得方式调试外环参数,最终获得一个比较满意得参数即可。
2、M2006(M3508)调参
做过RoboMaster比赛的同学应该接触的比较多,M2006与M3508是大疆出产的两款直流无刷减速电机,由于体积重量和所能提供的力矩大小各有特色各有不同的作用,之前因为项目原因简单的玩了一下。两款电机配备有各自的电机调速器(控制器),我们需要在其基础上对其进行控制。
2.1 M2006(M3508)控制框图
该电机只有底层的电流环,速度环和位置环均不存在,但其实和 Tmotor 电机的控制类似,我们同样可以在其上编写位置环和速度环控制。

添加了速度环和位置环的控制框图如下,和上面的其实并没有区别。

2.2 M2006与M3508 完整的控制程序
具体的控制程序并没有太大区别,不同的只有给定电流的指令。
具体文件参考 Tmotor 文件进行修改。
2.3 调试技巧
大疆的电机和 Tmotor 控制指令的执行是有区别的,Tmotor 的电机给了电流指令后,它会保存这个指令一直执行,所以只需要给定一次就好了;而 DJI 的它是以矩形波的形式让给定电流维持一小段时间,所以需要不断的给定电流指令。具体的调试技巧和上面大同小异,除了参数的问题,还需要注意指令发送的频率,一般来说100HZ左右都是可以达到比较满意的工况的。
四、存在的问题
在上面的电机控制中,运行程序的朋友们会发现电机依然存在问题,其中最明显的就是启动时的抖动问题,这个问题也是可以解决的,比如变 PID 控制或者对启动电流进行限制,实现软启动,也可以对电流上升的速度或加速度进行一个限制,如果有机会的话将会在后面将解决后的方案与大家分享。