其实这些内容都是一年前开发完成的……不信,那看如下博客:
-
ROS2Foxy和ArduinoESP32消息和速度指令发布调试笔记
 https://zhangrelay.blog.csdn.net/article/details/109566819
https://zhangrelay.blog.csdn.net/article/details/109566819
^_^ -分割线- ^_^
ros2博客点击量比ros1低多了,于是就专心开发并没有更新全部内容。
啥子?ROS2的教程太少,这里已经有六套啦,如果还不够?学习了十几套源码开发课程,慢慢更新。
-
ROS2机器人个人教程博客汇总(2021共6套)
https://blog.csdn.net/ZhangRelay/article/details/120062413?spm=1001.2014.3001.5502
将std_msgs::String更换为geometry_msgs::Twist。
当然代码需要修改的地方也不少,直接上源码:
#include <ros2arduino.h>
#include <WiFi.h>
#include <WiFiUdp.h>
#define SSID "ESP32LoveROS2"
#define SSID_PW "66666666"
#define AGENT_IP "172.20.10.2"
#define AGENT_PORT 2021 //AGENT port number
#define PUBLISH_FREQUENCY 10 //hz
void publishString(geometry_msgs::Twist* msg, void* arg)
{
(void)(arg);
static int cnt = 0;
// msg->linear.x = ((double)rand()/(RAND_MAX)); //随机线速度
// msg->angular.z = ((double)rand()/(RAND_MAX)); //随机角速度
msg->linear.x = 0.2; //固定线速度
msg->angular.z = 1.0 - 0.001*cnt; //变化角速度
cnt++;
}
class StringPub : public ros2::Node
{
public:
StringPub()
: Node("esp32_cmdvel")
{
ros2::Publisher<geometry_msgs::Twist>* publisher_ = this->createPublisher<geometry_msgs::Twist>("turtle1/cmd_vel");
this->createWallFreq(PUBLISH_FREQUENCY, (ros2::CallbackFunc)publishString, nullptr, publisher_);
}
};
WiFiUDP udp;
void setup()
{
WiFi.begin(SSID, SSID_PW);
while(WiFi.status() != WL_CONNECTED);
ros2::init(&udp, AGENT_IP, AGENT_PORT);
}
void loop()
{
static StringPub StringNode;
ros2::spin(&StringNode);
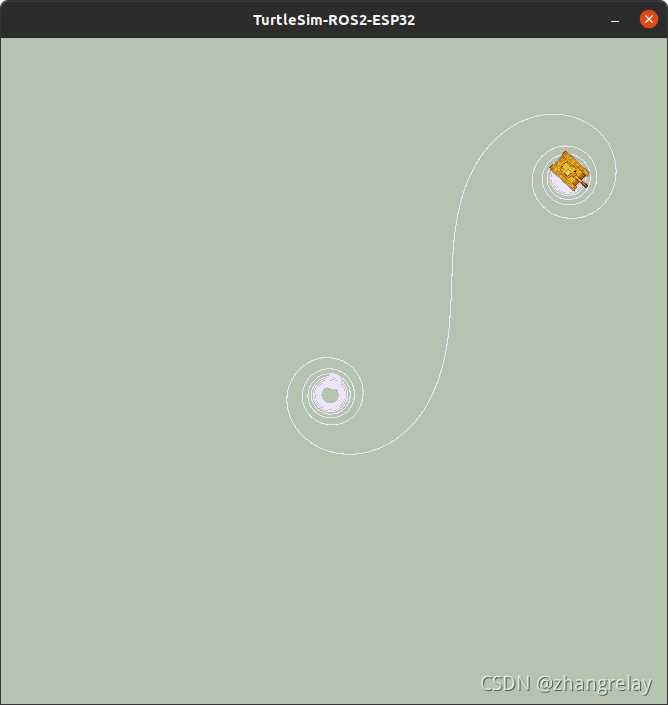
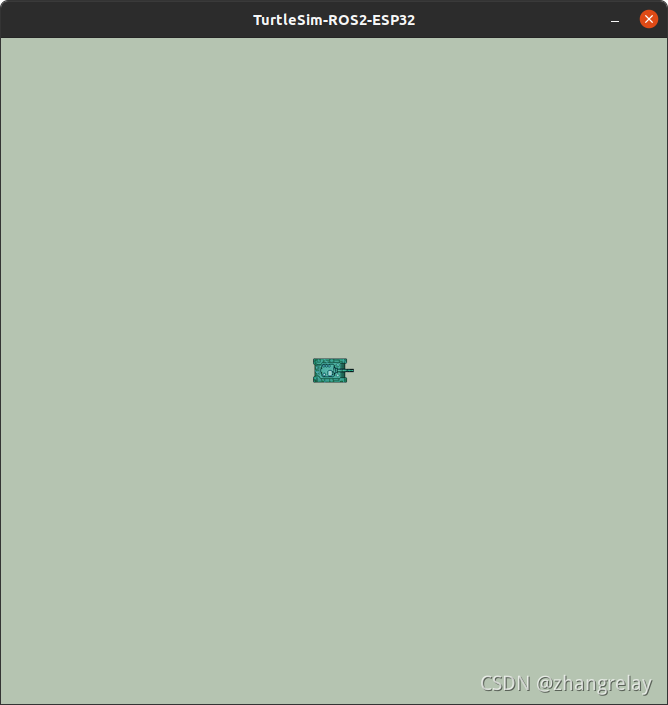
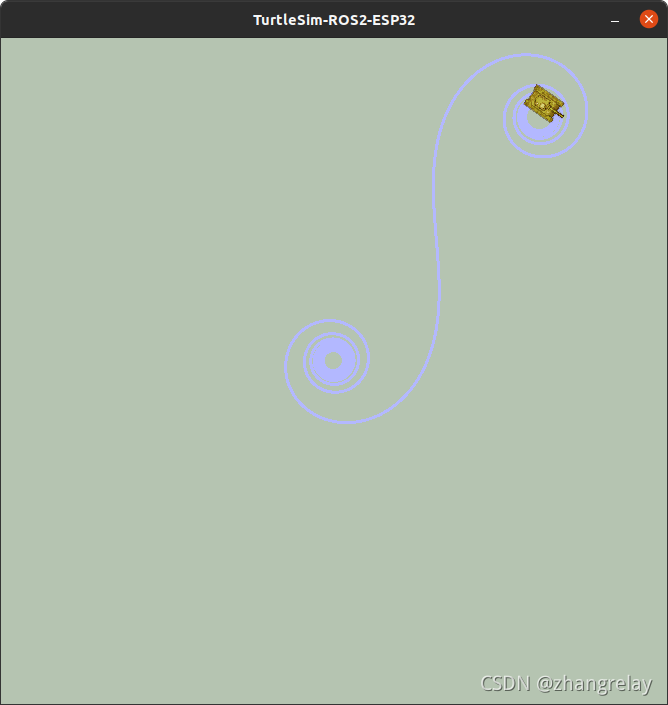
}小乌龟看腻了,换了小坦克,背景色不喜欢,换莫兰迪色,舞台太小换大!
小坦克:
![]()
![]()
![]()
![]()
![]()
![]()
莫兰迪色(部分):

选b5c4b1。
#define DEFAULT_BG_R 0xb5
#define DEFAULT_BG_G 0xc4
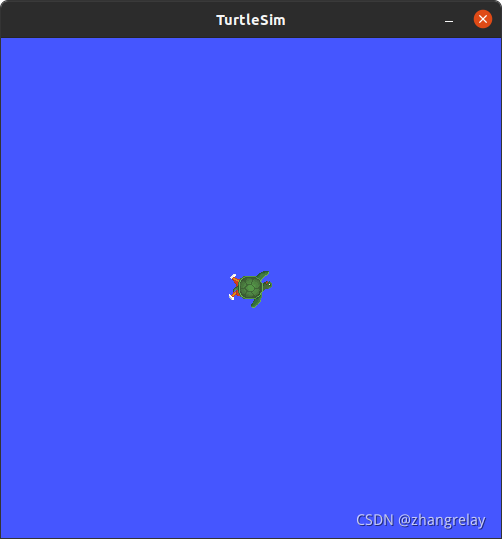
#define DEFAULT_BG_B 0xb1舞台原来才500---换---666。
原来是这样的:
现在是这样的:
走两步?那不行,一定要走满整个舞台!!!
一开始:
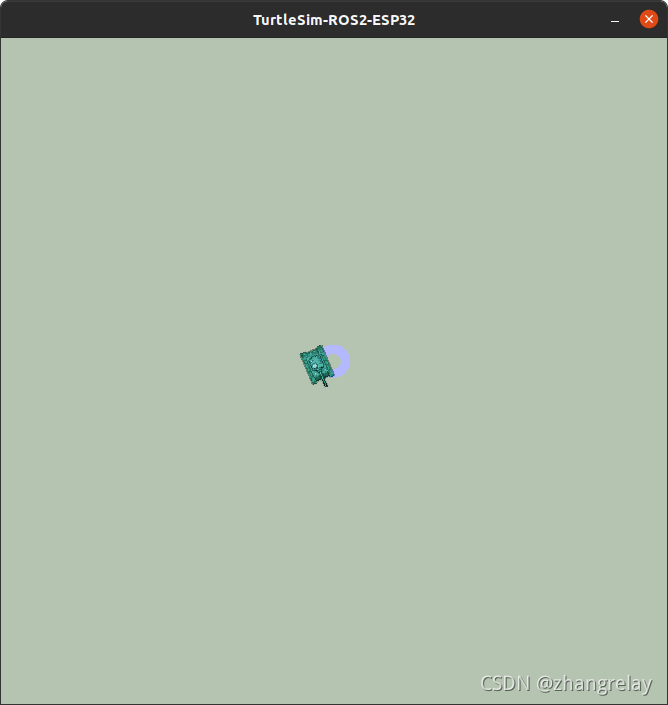
然后:
当然也可以换个颜色,再走个魔鬼步伐。下一节细说。