张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 » 车道 - 第1页

06月28日
基于安卓手机的辅助驾驶APP开发_cjnewstar111的专栏
发布 : zsy861 | 分类 : 《关注互联网》 | 评论 : 0 | 浏览 : 552次
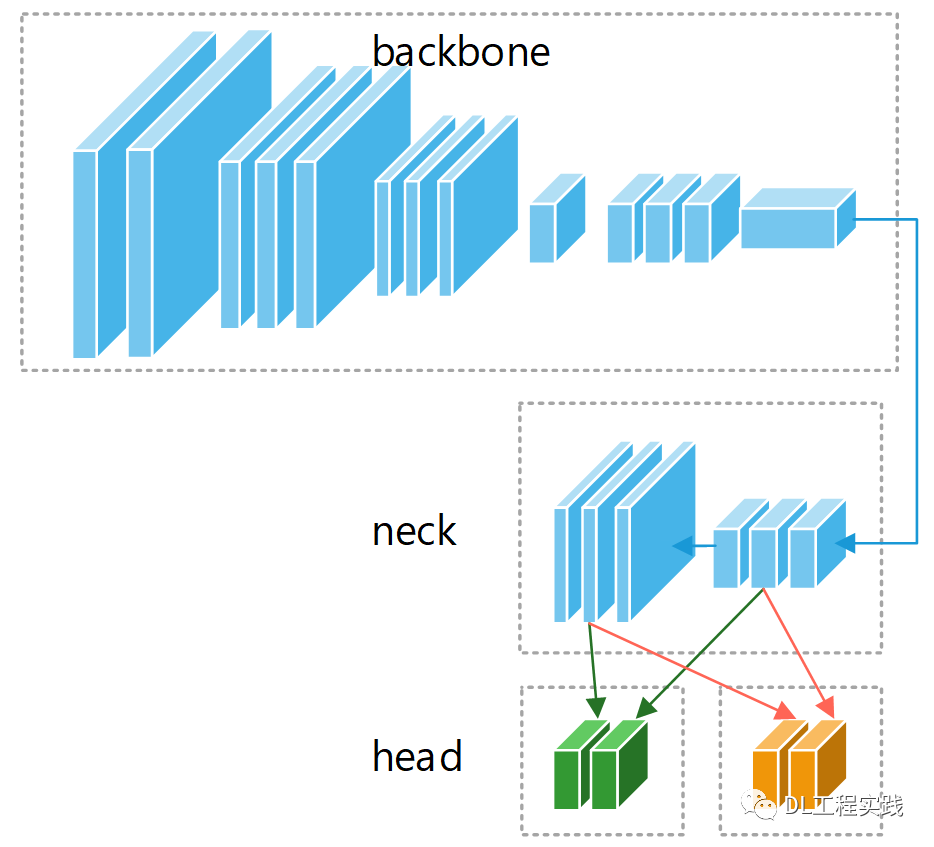
目录结构: 1、项目介绍 2、网络设计 3、数据采集 4、APP开发 5、APP下载 6、效果展示 1、项目介绍:该项目主要在于探索是否能在通用的安卓手机上实现一个辅助驾驶功能的APP。功能与性能:能够检测行人、自行车、电瓶车、汽车、卡车、公交车等常规交通参与者。在行人等数量较多的情况下,可以发出提醒。在前车距离过小的情况下,可以发出提醒。能够检测出车道线(下一版本增加)在偏离车道线的时候能够发出提醒(下一版本增加)能在手机上较为实时的运行(>=10fps)
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1