一、噪声
我们将常会听到平滑(去噪),锐化(和平滑是相反的),那我们就会有疑惑?什么是噪声呢?图像噪声是指存在于图像数据中不必要的或多余的干扰信息,噪声的存在严重影响了图像的质量。噪声在理论上是”不可预测“的,所以我们只能用概率论方法认识“随机误差”。
二、噪声的分类
光电管的噪声、摄像管噪声、摄像机噪声、椒盐噪声(数字图像常见的噪声,椒盐噪声就是在图像上随机出现黑色白色的像素)等等。
三、图像中添加椒盐噪声
椒盐噪声又被称作脉冲噪声,它会随机改变图像中的像素值,是由相机成像、图像传输、解码处理等过程产生的黑白相间的亮暗点噪声,其样子就像在图像上随机的撒上一些盐粒和黑椒粒,因此被称为椒盐噪声。
代码如下:
import numpy as npimport cv2def cv_show(name,img): cv2.imshow(name,img) cv2.waitKey(0) cv2.destroyAllWindows()def add_sp_noise(img,sp_number): new_image=img row,col,channel=img.shape#获取行列,通道信息 s=int(sp_number*img.size/channel)#根据sp_number确定椒盐噪声 #确定要扫椒盐的像素值 change=np.concatenate((np.random.randint(0,row,size=(s,1)),np.random.randint(0,col,size=(s,1))),axis=1) for i in range(s): r=np.random.randint(0,2)#确定撒椒(0)还是盐(1) for j in range(channel): new_image[change[i,0],change[i,1],j]=r return new_image注意:在进行实验的时候,我们需要注意要进行拷贝不然原图会被破坏。
测试:
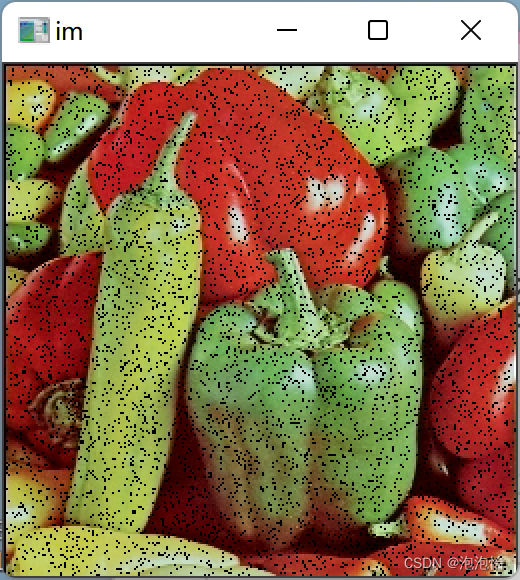
img=cv2.imread("C:/Users/bwy/Desktop/peppers.JPG")im=img.copy()im2=img.copy()im3=img.copy()im=add_sp_noise(im,0.05)im2=add_sp_noise(im2,0.1)im3=add_sp_noise(im3,0.3)r=np.hstack((img,im,im2,im3))cv_show('r',r)结果如图所示:
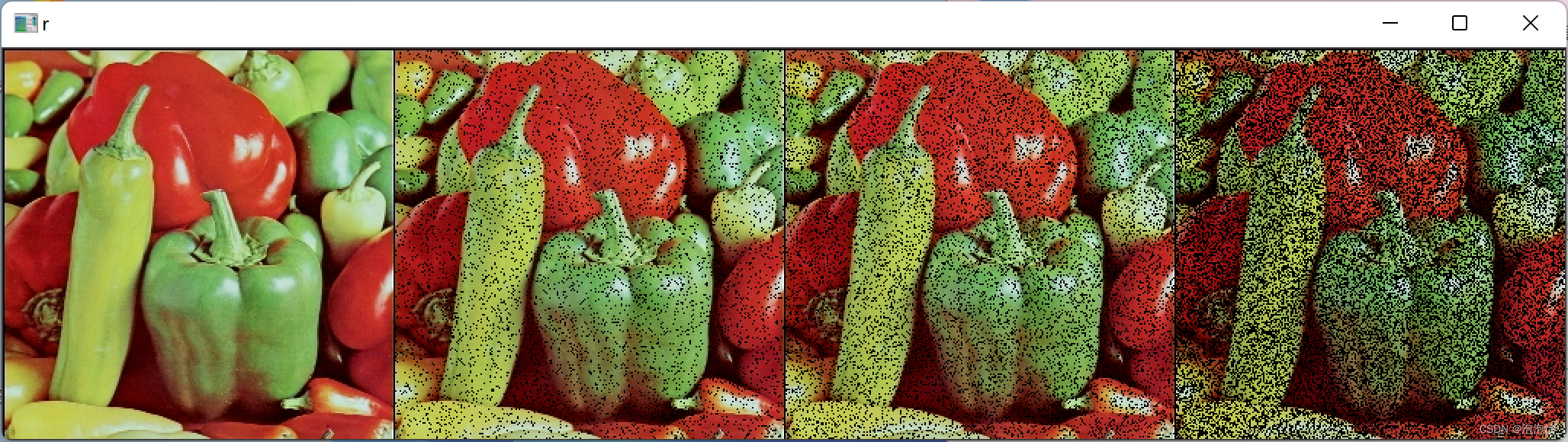
从图上看出,sp_number越大,噪声点越多。
四、基于滤波器方法去噪
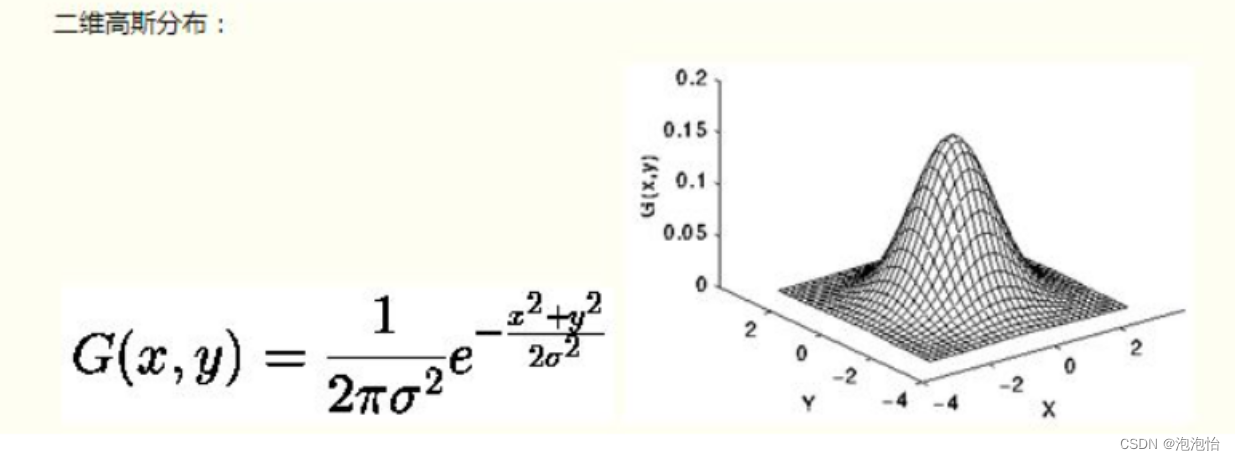
高斯滤波(手写代码):滤掉噪声的代价就是图像会有所模糊。
计算过程:
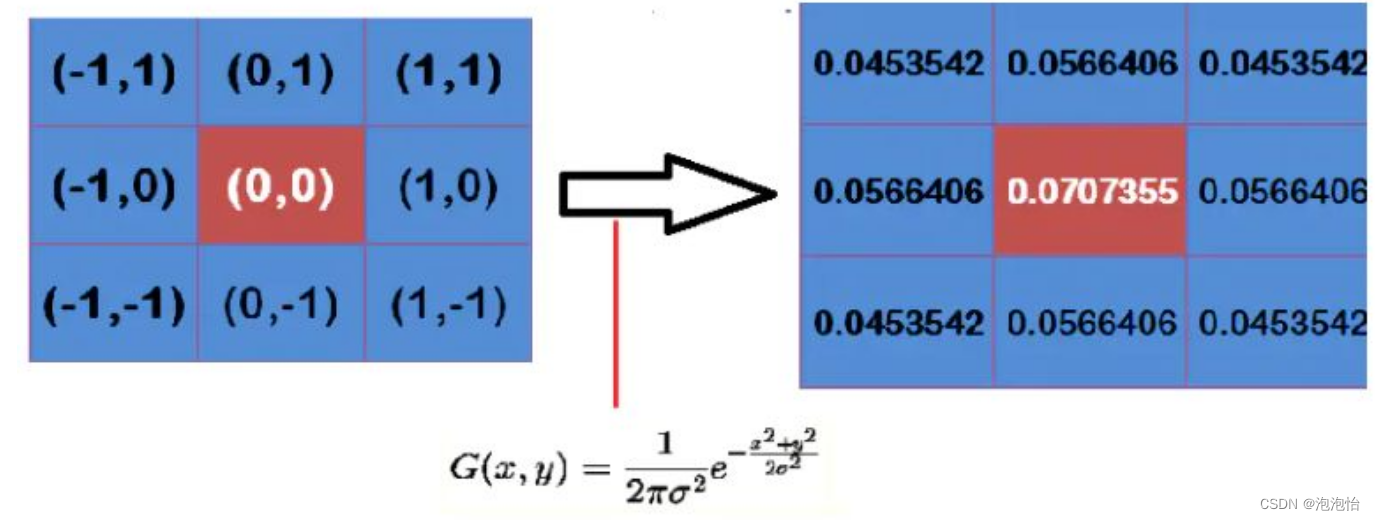
此时还要确保这九个点加起来为1(高斯模板的特性),这9个点的权重为0.4787147,因此将9个值都除以0.4787147,得到最终的高斯模板。
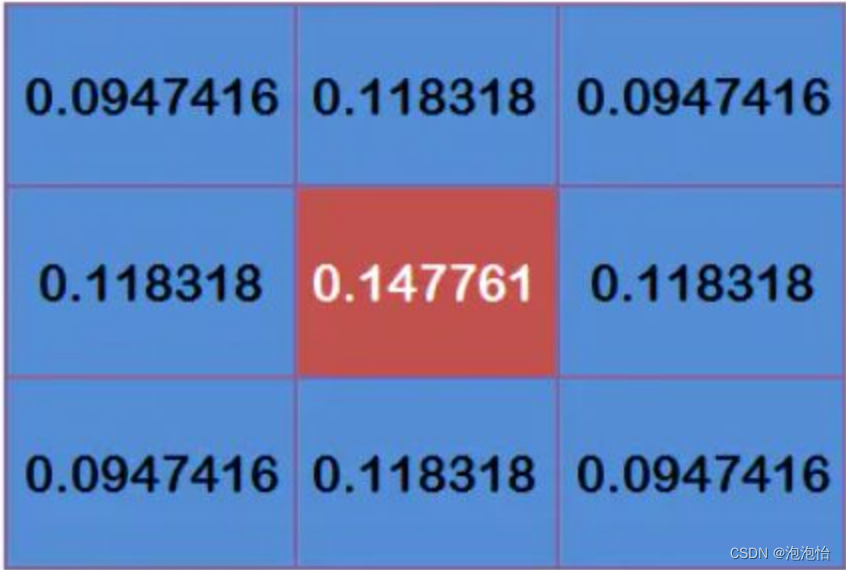 再与图像像素进行乘积,四周加和代替中间的。
再与图像像素进行乘积,四周加和代替中间的。
(1)灰度图像高斯滤波:
def gaosi_f(img,k_size,sigma): ##滤波图片的尺寸 h=img.shape[0] w=img.shape[1] ##用0填充边缘 pad=k_size//2 transform_img=np.zeros((h+2*pad,w+2*pad)) transform_img[pad:h+pad,pad:w+pad]=img new_img=np.zeros((h,w)) ##先计算高斯滤波核 gaosi_filter=np.zeros((k_size,k_size)) for x in range(-pad,-pad+k_size): for y in range(-pad,-pad+k_size): gaosi_filter[y+pad,x+pad]=np.exp(-(x**2+y**2)/(2*sigma**2))/(2*np.pi*sigma**2) gaosi_filter=gaosi_filter/np.sum(gaosi_filter) ##计算滤波后的图片 for i in range(pad,h+pad): for j in range(pad,w+pad): ##取图像k_size x k_size的像素值 p_img=transform_img[i-pad:i+pad+1,j-pad:j+pad+1] ##进行高斯滤波 value=np.sum(np.multiply(p_img,gaosi_filter)) new_img[i-pad,j-pad]=value ##对滤波后的图片中的像素值取整 new_img=np.round(new_img).astype(np.uint8) return new_img彩色图像高斯滤波:
def gaosi_fS(img,k_size,sigma): h=img.shape[0] w=img.shape[1] imShape=img.shape dim=len(imShape) if dim==2: eim=gaosi_f(img,k_size,sigma) else: imR=img[:,:,0] imG=img[:,:,1] imB=img[:,:,2] eim=np.zeros((h,w,3)) eimr=gaosi_f(imR,k_size,sigma) eimg=gaosi_f(imG,k_size,sigma) eimb=gaosi_f(imB,k_size,sigma) eim[:,:,0]=eimr eim[:,:,1]=eimg eim[:,:,2]=eimb return eim测试:
new_img=gaosi_fS(im,3,0.5)cv_show("new_img",new_img)cv_show("im",im)结果如图所示:

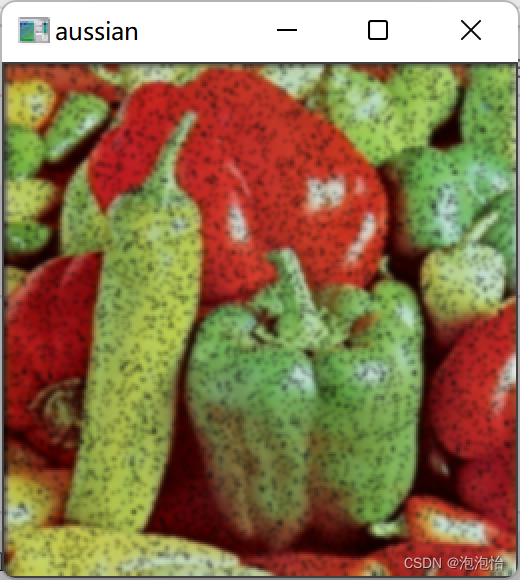
五、opencv高斯滤波调包
aussian = cv2.GaussianBlur(im, (5,5), 1)cv_show("aussian",aussian)结果如图所示: