在YoloV7中添加EIoU,SIoU,AlphaIoU,FocalEIoU,Wise-IoU.
yolov7中box_iou其默认用的是CIoU,其中代码还带有GIoU,DIoU, AlphaIoU,文件路径:utils/general.py,函数名为:bbox_iou
重磅!!!!! YOLO模型改进集合指南-CSDN
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, eps=1e-7): # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4 box2 = box2.T # Get the coordinates of bounding boxes if x1y1x2y2: # x1, y1, x2, y2 = box1 b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3] b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3] else: # transform from xywh to xyxy b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2 b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2 b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2 b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2 # Intersection area inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0) # Union Area w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps union = w1 * h1 + w2 * h2 - inter + eps iou = inter / union if GIoU or DIoU or CIoU: cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height if CIoU or DIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1 c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared if DIoU: return iou - rho2 / c2 # DIoU elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47 v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / (h2 + eps)) - torch.atan(w1 / (h1 + eps)), 2) with torch.no_grad(): alpha = v / (v - iou + (1 + eps)) return iou - (rho2 / c2 + v * alpha) # CIoU else: # GIoU https://arxiv.org/pdf/1902.09630.pdf c_area = cw * ch + eps # convex area return iou - (c_area - union) / c_area # GIoU else: return iou # IoU我们可以看到函数顶部,有GIoU,DIoU,CIoU的bool参数可以选择,如果全部为False的时候,其会返回最普通的Iou,如果其中一个为True的时候,即返回设定为True的那个Iou。
那么重点来了,我们怎么在这个函数里面添加EIoU,SIoU,AlphaIoU,FocalEIoU呢?
我们只需要把上面提及到的这个函数替换成以下,代码出自:github链接,这个github上还有一些yolov5的改进源码和一些常用的脚本,有兴趣可以去看看,请各位也帮忙点个star支持下,谢谢!
def bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, SIoU=False, EIoU=False, Focal=False, alpha=1, gamma=0.5, eps=1e-7): # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4 box2 = box2.T # Get the coordinates of bounding boxes if x1y1x2y2: # x1, y1, x2, y2 = box1 b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3] b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3] else: # transform from xywh to xyxy b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2 b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2 b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2 b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2 # Intersection area inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0) # Union Area w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps union = w1 * h1 + w2 * h2 - inter + eps # IoU # iou = inter / union # ori iou iou = torch.pow(inter/(union + eps), alpha) # alpha iou if CIoU or DIoU or GIoU or EIoU or SIoU: cw = b1_x2.maximum(b2_x2) - b1_x1.minimum(b2_x1) # convex (smallest enclosing box) width ch = b1_y2.maximum(b2_y2) - b1_y1.minimum(b2_y1) # convex height if CIoU or DIoU or EIoU or SIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1 c2 = (cw ** 2 + ch ** 2) ** alpha + eps # convex diagonal squared rho2 = (((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4) ** alpha # center dist ** 2 if CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47 v = (4 / math.pi ** 2) * (torch.atan(w2 / h2) - torch.atan(w1 / h1)).pow(2) with torch.no_grad(): alpha_ciou = v / (v - iou + (1 + eps)) if Focal: return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)), torch.pow(inter/(union + eps), gamma) # Focal_CIoU else: return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU elif EIoU: rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2 rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2 cw2 = torch.pow(cw ** 2 + eps, alpha) ch2 = torch.pow(ch ** 2 + eps, alpha) if Focal: return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2), torch.pow(inter/(union + eps), gamma) # Focal_EIou else: return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # EIou elif SIoU: # SIoU Loss https://arxiv.org/pdf/2205.12740.pdf s_cw = (b2_x1 + b2_x2 - b1_x1 - b1_x2) * 0.5 + eps s_ch = (b2_y1 + b2_y2 - b1_y1 - b1_y2) * 0.5 + eps sigma = torch.pow(s_cw ** 2 + s_ch ** 2, 0.5) sin_alpha_1 = torch.abs(s_cw) / sigma sin_alpha_2 = torch.abs(s_ch) / sigma threshold = pow(2, 0.5) / 2 sin_alpha = torch.where(sin_alpha_1 > threshold, sin_alpha_2, sin_alpha_1) angle_cost = torch.cos(torch.arcsin(sin_alpha) * 2 - math.pi / 2) rho_x = (s_cw / cw) ** 2 rho_y = (s_ch / ch) ** 2 gamma = angle_cost - 2 distance_cost = 2 - torch.exp(gamma * rho_x) - torch.exp(gamma * rho_y) omiga_w = torch.abs(w1 - w2) / torch.max(w1, w2) omiga_h = torch.abs(h1 - h2) / torch.max(h1, h2) shape_cost = torch.pow(1 - torch.exp(-1 * omiga_w), 4) + torch.pow(1 - torch.exp(-1 * omiga_h), 4) if Focal: return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_SIou else: return iou - torch.pow(0.5 * (distance_cost + shape_cost) + eps, alpha) # SIou if Focal: return iou - rho2 / c2, torch.pow(inter/(union + eps), gamma) # Focal_DIoU else: return iou - rho2 / c2 # DIoU c_area = cw * ch + eps # convex area if Focal: return iou - torch.pow((c_area - union) / c_area + eps, alpha), torch.pow(inter/(union + eps), gamma) # Focal_GIoU https://arxiv.org/pdf/1902.09630.pdf else: return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU https://arxiv.org/pdf/1902.09630.pdf if Focal: return iou, torch.pow(inter/(union + eps), gamma) # Focal_IoU else: return iou # IoU注意事项
我认为Focal_EIoU的思想是可以用作与其他IoU的变种,因此我对里面所有的IoU都支持Focal_EIoU的思想,只需要设定Focal参数为True即可,我自己测试的过程中,除了Focal_SIoU出现loss为inf之外,其他的都正常,不过这个不同的数据集可能出现不一样,具体可以自行测试下。gamma参数是Focal_EIoU中的gamma参数,一般就是为0.5,有需要可以自行更改。alpha参数为AlphaIoU中的alpha参数,默认为1,1的意思就是跟正常的IoU一样,如果想采用AlphaIoU的话,论文alpha默认值为3。(比如我不想使用AlphaIoU的特性,我就把alpha设置为1就可以,如果我想使用AlphaIoU的特性,我可以设置alpha为3)。跟Focal_EIoU一样,我认为AlphaIoU的思想同样可以用在其他的IoU变种上,简单来说就是如果你设置了alpha为3,其他IoU设定的参数(GIoU,DIoU,CIoU,EIoU,SIoU)为False的时候,那就是AlphaIoU,如果你设置了alpha为3,CIoU为True的时候,那就是AlphaCIoU,效果的话就因数据集和模型而已,具体可以自行测试下。想用那个IoU变种,就直接设置参数为True即可。AlphaIoU理论上与Focal_EIoU没有直接的冲突,但是作者这边没有详细测试过,这两者一起用会是什么效果,有兴趣可以自行测试下。除了以上这个函数替换,还需要在utils/loss.py中ComputeLoss Class中的__call__和ComputeLossOTA Class中的__call__函数中修改一下:
原本的__call__函数如下: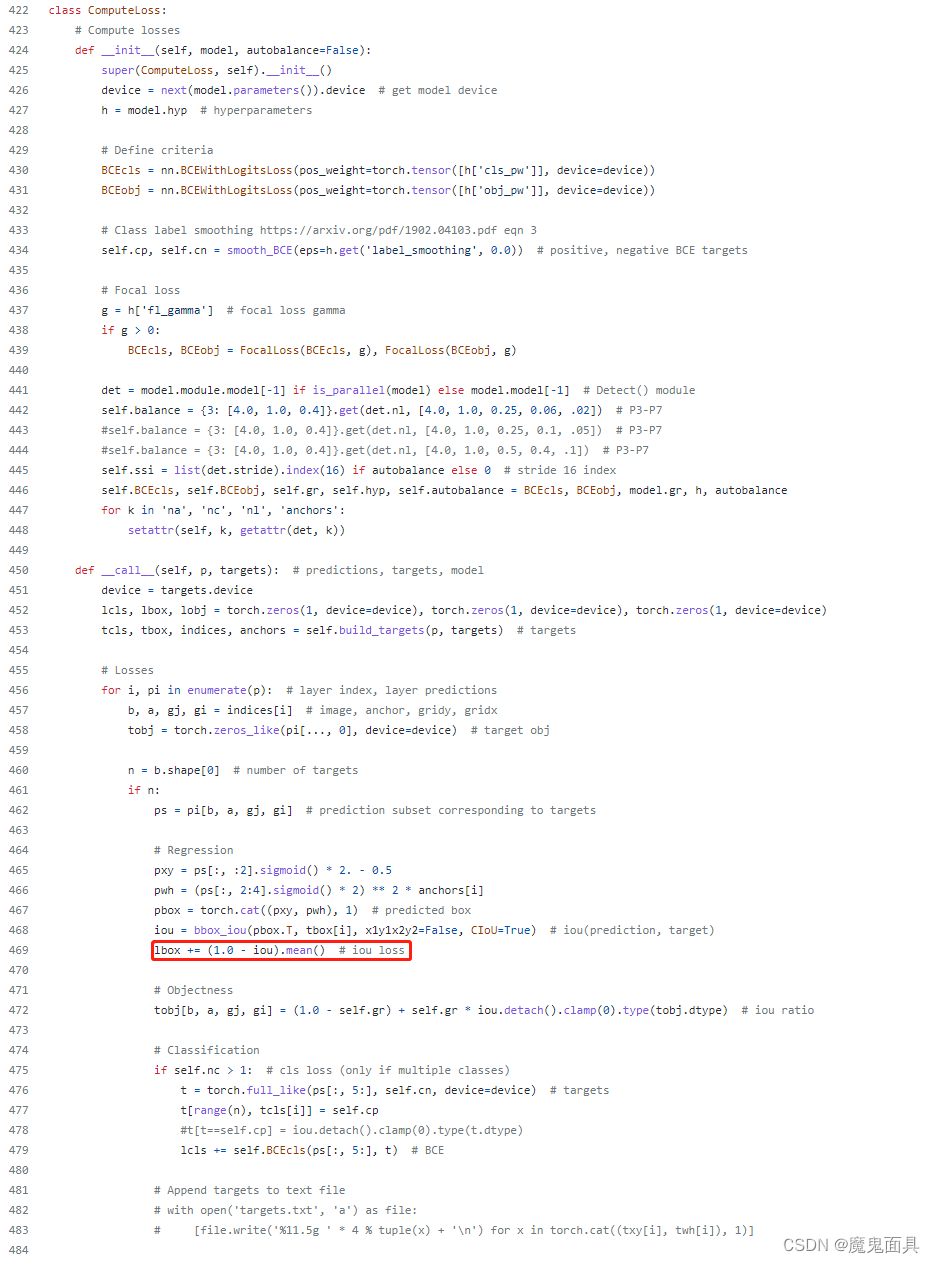
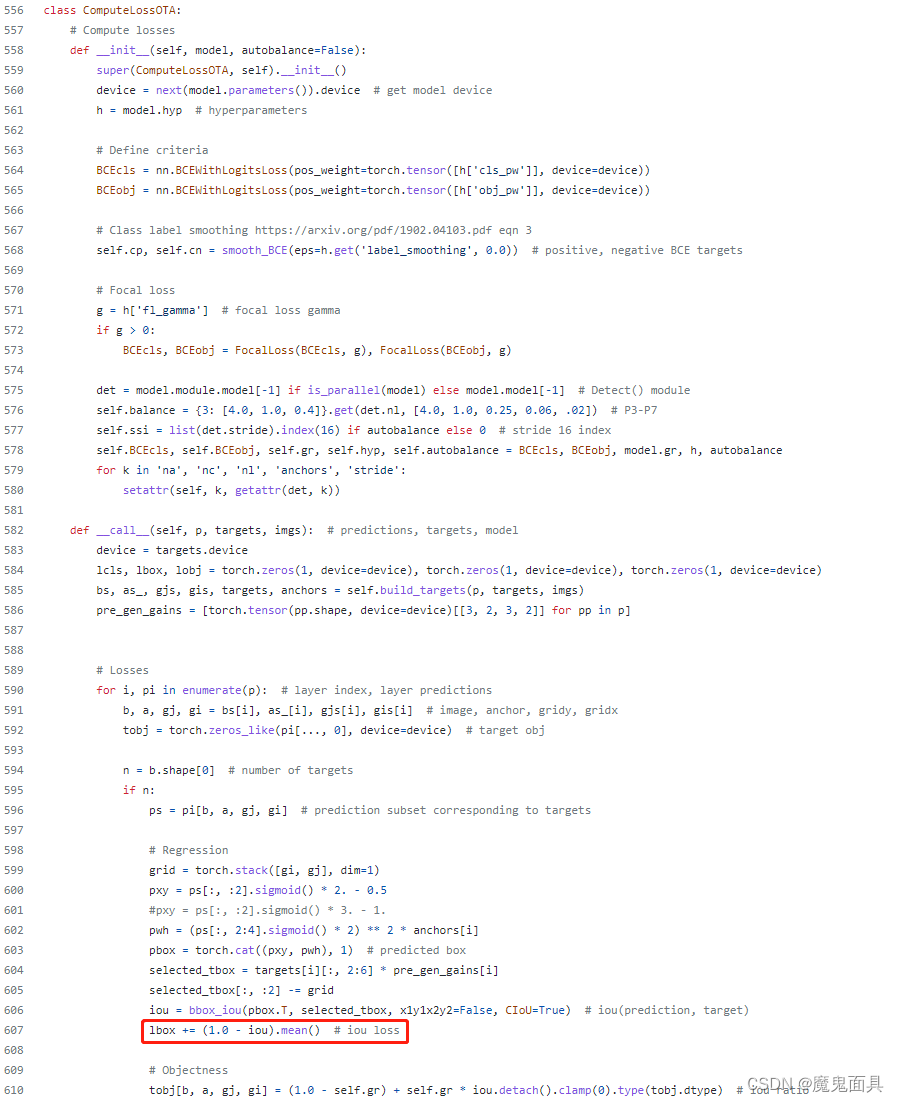
主要对上述两个红框部分替换为以下代码:
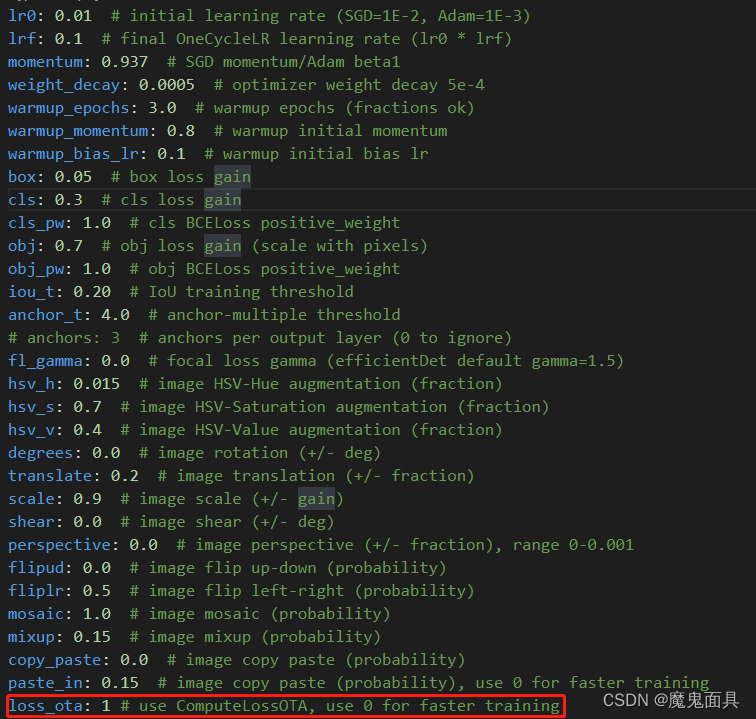
if type(iou) is tuple: lbox += (iou[1].detach() * (1 - iou[0])).mean() iou = iou[0]else: lbox += (1.0 - iou).mean() # iou loss原因是因为yolov7中的yaml配置文件有一个loss_ota的参数会选择采用哪一个Loss(ComputeLoss,ComputeLossOTA),为了避免有一个不记得修改,就两个都一起修改即可。
最后修改参数就在调用bbox_iou中进行修改即可,比如上面的代码就是使用了CIoU,如果你想使用Focal_EIoU那么你可以修改为下:
iou = bbox_iou(pbox.T, selected_tbox, x1y1x2y2=False, EIoU=True, Focal=True)