文章目录
前言EIoU论文简介加入YOLOv5 Alpha-IoU论文简介加入YOLOv5 References
前言
本文使用的YOLOv5版本为v6.1,对YOLOv5-6.x网络结构还不熟悉的同学,可以移步至:【YOLOv5-6.x】网络模型&源码解析
想要尝试改进YOLOv5-6.1的同学,可以参考以下几篇博客:
【魔改YOLOv5-6.x(上)】结合轻量化网络Shufflenetv2、Mobilenetv3和Ghostnet
【魔改YOLOv5-6.x(中)】加入ACON激活函数、CBAM和CA注意力机制、加权双向特征金字塔BiFPN
【魔改YOLOv5-6.x(下)】YOLOv5s+Ghostconv+BiFPN+CA
EIoU
Zhang, Yi-Fan, et al. “Focal and efficient IOU loss for accurate bounding box regression.” arXiv preprint arXiv:2101.08158 (2021).
论文地址
论文简介
我们知道,CIoU损失是在DIoU损失的基础上添加了衡量预测框和GT框纵横比 v v v,在一定程度上可以加快预测框的回归速度,但是仍然存在着很大的问题:
在预测框回归过程中,一旦预测框和GT框的宽高纵横比呈现线性比例时,CIoU中添加的相对比例的惩罚项便不再起作用根据预测框w和h的梯度公式可以推知,w和h在其中一个值增大时,另外一个值必须减小,它俩不能保持同增同减为了解决这个问题,EIoU提出了直接对w和h的预测结果进行惩罚的损失函数:
L E I o U = L I o U + L dis + L asp = 1 − I o U + ρ 2 ( b , b g t ) c 2 + ρ 2 ( w , w g t ) C w 2 + ρ 2 ( h , h g t ) C h 2 \begin{aligned} \mathcal{L}_\mathrm{E I o U} &=\mathcal{L}_\mathrm{I o U}+\mathcal{L}_{\text {dis }}+\mathcal{L}_{\text {asp }} \\ &=1-I o U+\frac{\rho^{2}\left(\mathbf{b}, \mathbf{b}^\mathrm{g t}\right)}{c^{2}}+\frac{\rho^{2}\left(w, w^\mathrm{g t}\right)}{C_\mathrm{w}^{2}}+\frac{\rho^{2}\left(h, h^\mathrm{g t}\right)}{C_\mathrm{h}^{2}} \end{aligned} LEIoU=LIoU+Ldis +Lasp =1−IoU+c2ρ2(b,bgt)+Cw2ρ2(w,wgt)+Ch2ρ2(h,hgt)
下图是GIoU、CIoU和EIoU损失预测框的迭代过程对比图,红色框和绿色框就是预测框的回归过程,蓝色框是真实框,黑色框是预先设定的锚框:
GIoU的问题是使用最小外接矩形的面积减去并集的面积作为惩罚项,这导致了GIoU存在先扩大并集面积,再优化IoU的走弯路的问题CIoU的问题是宽和高不能同时增大或者减小,而EIoU则可以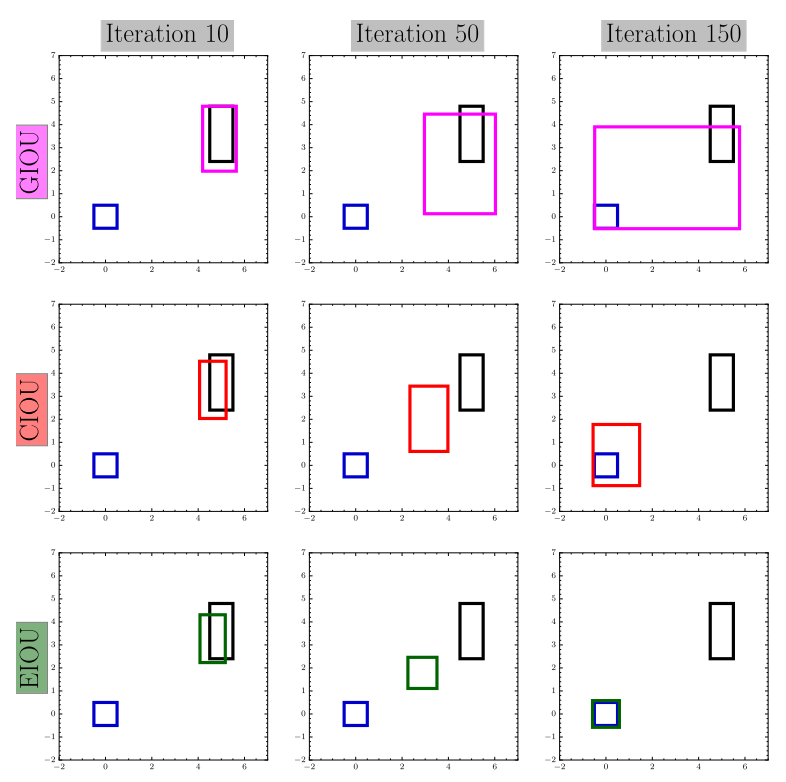
除此之外,论文中还提到了利用Focal Loss对EIOU进行加权处理:
L F o c a l − E I o U = I o U γ ∗ L E I o U L_\mathrm{Focal-EIoU}=IoU^{\gamma}*L_\mathrm{EIoU} LFocal−EIoU=IoUγ∗LEIoU
加入YOLOv5
在utils/metrics.py中,找到bbox_iou函数,可以把原有的注释掉,换成下面的代码: # 计算两个框的特定IOUdef bbox_iou(box1, box2, x1y1x2y2=True, GIoU=False, DIoU=False, CIoU=False, EIoU=False, eps=1e-7): # Returns the IoU of box1 to box2. box1 is 4, box2 is nx4 # 这里取转置,为了后续方便每个维度(坐标)之间的计算 box2 = box2.T # Get the coordinates of bounding boxes if x1y1x2y2: # x1, y1, x2, y2 = box1 b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3] b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3] else: # transform from xywh to xyxy 默认执行这里 b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2 b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2 b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2 b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2 # Intersection area inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0) # Union Area w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps union = w1 * h1 + w2 * h2 - inter + eps iou = inter / union # 目标框IOU损失函数的计算 if CIoU or DIoU or GIoU or EIoU: # 两个框的最小闭包区域的width cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width # 两个框的最小闭包区域的height ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height if CIoU or DIoU or EIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1 # 最小外接矩形 对角线的长度平方 c2 = cw ** 2 + ch ** 2 + eps # convex diagonal squared # 两个框中心点之间距离的平方 rho2 = ((b2_x1 + b2_x2 - b1_x1 - b1_x2) ** 2 + (b2_y1 + b2_y2 - b1_y1 - b1_y2) ** 2) / 4 # center distance squared if DIoU: return iou - rho2 / c2 # DIoU # CIoU 比DIoU多了限制长宽比的因素:v * alpha elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47 v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2) with torch.no_grad(): alpha = v / (v - iou + (1 + eps)) return iou - (rho2 / c2 + v * alpha) # EIoU 在CIoU的基础上将纵横比的损失项拆分成预测的宽高分别与最小外接框宽高的差值 加速了收敛提高了回归精度 elif EIoU: rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** 2 rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** 2 cw2 = cw ** 2 + eps ch2 = ch ** 2 + eps return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # GIoU https://arxiv.org/pdf/1902.09630.pdf c_area = cw * ch + eps # convex area return iou - (c_area - union) / c_area return iou # IoUutils/loss.py中,找到ComputeLoss类中的__call__()函数,把Regression loss中计算iou的代码,换成下面这句: iou = bbox_iou(pbox.T, tbox[i], x1y1x2y2=False, CIoU=False, EIoU=True) # iou(prediction, target)
Alpha-IoU
He, Jiabo, et al. “$\alpha $-IoU: A Family of Power Intersection over Union Losses for Bounding Box Regression.” Advances in Neural Information Processing Systems 34 (2021).
论文地址
论文简介
由于IoU Loss对于bbox尺度不变,可以训练出更好的检测器,因此在目标检测中常采用IOU Loss对预测框计算定位回归损失(在YOLOv5中采用CIoU Loss)
而本文提出的Alpha-IoU Loss是基于现有IoU Loss的统一幂化,即对所有的IoU Loss,增加 α \alpha α幂,当 α \alpha α等于1时,则回归到原始各个Loss中:
L I o U = 1 − I o U ⟹ L α − I o U = 1 − I o U α L G I o U = 1 − I o U + ∣ C − ( B ∪ B g t ) ∣ ∣ C ∣ ⟹ L α − G I o U = 1 − I o U α + ( ∣ C − ( B ∪ B g t ) ∣ ∣ C ∣ ) α L D I o U = 1 − I o U + ρ 2 ( b , b g t ) c 2 ⟹ L α − D I o U = 1 − I o U α + ρ 2 α ( b , b g t ) c 2 α L C I o U = 1 − I o U + ρ 2 ( b , b g t ) c 2 + β v ⟹ L α − C I o U = 1 − I o U α + ρ 2 α ( b , b g t ) c 2 α + ( β v ) α \begin{aligned} \mathcal{L}_{\mathrm{IoU}}=1-I o U & \Longrightarrow \mathcal{L}_{\alpha-\mathrm{IoU}}=1-I o U^{\alpha} \\ \mathcal{L}_{\mathrm{GIoU}}=1-I o U+\frac{\left|C-\left(B \cup B^\mathrm{g t}\right)\right|}{|C|} & \Longrightarrow \mathcal{L}_{\alpha-\mathrm{GIoU}}=1-I o U^{\alpha}+\left(\frac{\left|C-\left(B \cup B^\mathrm{g t}\right)\right|}{|C|}\right)^{\alpha} \\ \mathcal{L}_{\mathrm{DIoU}}=1-I o U+\frac{\rho^{2}\left(\boldsymbol{b}, \boldsymbol{b}^\mathrm{g t}\right)}{c^{2}} & \Longrightarrow \mathcal{L}_{\alpha-\mathrm{DIoU}}=1-I o U^{\alpha}+\frac{\rho^{2 \alpha}\left(\boldsymbol{b}, \boldsymbol{b}^\mathrm{g t}\right)}{c^{2 \alpha}} \\ \mathcal{L}_{\mathrm{CIoU}}=1-I o U+\frac{\rho^{2}\left(\boldsymbol{b}, \boldsymbol{b}^\mathrm{g t}\right)}{c^{2}}+\beta v & \Longrightarrow \mathcal{L}_{\alpha-\mathrm{CIoU}}=1-I o U^{\alpha}+\frac{\rho^{2 \alpha}\left(\boldsymbol{b}, \boldsymbol{b}^\mathrm{g t}\right)}{c^{2 \alpha}}+(\beta v)^{\alpha} \end{aligned} LIoU=1−IoULGIoU=1−IoU+∣C∣∣C−(B∪Bgt)∣LDIoU=1−IoU+c2ρ2(b,bgt)LCIoU=1−IoU+c2ρ2(b,bgt)+βv⟹Lα−IoU=1−IoUα⟹Lα−GIoU=1−IoUα+(∣C∣∣C−(B∪Bgt)∣)α⟹Lα−DIoU=1−IoUα+c2αρ2α(b,bgt)⟹Lα−CIoU=1−IoUα+c2αρ2α(b,bgt)+(βv)α
加入YOLOv5
# Alpha-IOU:https://arxiv.org/abs/2110.13675# 参考:https://mp.weixin.qq.com/s/l22GJtA7Vd11dpY9QG4k2Adef bbox_alpha_iou(box1, box2, x1y1x2y2=False, GIoU=False, DIoU=False, CIoU=False, EIoU=False, alpha=3, eps=1e-9): # Returns tsqrt_he IoU of box1 to box2. box1 is 4, box2 is nx4 box2 = box2.T # Get the coordinates of bounding boxes if x1y1x2y2: # x1, y1, x2, y2 = box1 b1_x1, b1_y1, b1_x2, b1_y2 = box1[0], box1[1], box1[2], box1[3] b2_x1, b2_y1, b2_x2, b2_y2 = box2[0], box2[1], box2[2], box2[3] else: # transform from xywh to xyxy b1_x1, b1_x2 = box1[0] - box1[2] / 2, box1[0] + box1[2] / 2 b1_y1, b1_y2 = box1[1] - box1[3] / 2, box1[1] + box1[3] / 2 b2_x1, b2_x2 = box2[0] - box2[2] / 2, box2[0] + box2[2] / 2 b2_y1, b2_y2 = box2[1] - box2[3] / 2, box2[1] + box2[3] / 2 # Intersection area inter = (torch.min(b1_x2, b2_x2) - torch.max(b1_x1, b2_x1)).clamp(0) * \ (torch.min(b1_y2, b2_y2) - torch.max(b1_y1, b2_y1)).clamp(0) # Union Area w1, h1 = b1_x2 - b1_x1, b1_y2 - b1_y1 + eps w2, h2 = b2_x2 - b2_x1, b2_y2 - b2_y1 + eps union = w1 * h1 + w2 * h2 - inter + eps # change iou into pow(iou+eps) 加入α次幂 # alpha iou iou = torch.pow(inter / union + eps, alpha) beta = 2 * alpha if GIoU or DIoU or CIoU or EIoU: # 两个框的最小闭包区域的width和height cw = torch.max(b1_x2, b2_x2) - torch.min(b1_x1, b2_x1) # convex (smallest enclosing box) width ch = torch.max(b1_y2, b2_y2) - torch.min(b1_y1, b2_y1) # convex height if CIoU or DIoU or EIoU: # Distance or Complete IoU https://arxiv.org/abs/1911.08287v1 # 最小外接矩形 对角线的长度平方 c2 = cw ** beta + ch ** beta + eps # convex diagonal rho_x = torch.abs(b2_x1 + b2_x2 - b1_x1 - b1_x2) rho_y = torch.abs(b2_y1 + b2_y2 - b1_y1 - b1_y2) # 两个框中心点之间距离的平方 rho2 = (rho_x ** beta + rho_y ** beta) / (2 ** beta) # center distance if DIoU: return iou - rho2 / c2 # DIoU elif CIoU: # https://github.com/Zzh-tju/DIoU-SSD-pytorch/blob/master/utils/box/box_utils.py#L47 v = (4 / math.pi ** 2) * torch.pow(torch.atan(w2 / h2) - torch.atan(w1 / h1), 2) with torch.no_grad(): alpha_ciou = v / ((1 + eps) - inter / union + v) # return iou - (rho2 / c2 + v * alpha_ciou) # CIoU return iou - (rho2 / c2 + torch.pow(v * alpha_ciou + eps, alpha)) # CIoU # EIoU 在CIoU的基础上 # 将预测框宽高的纵横比损失项 拆分成预测框的宽高分别与最小外接框宽高的差值 # 加速了收敛提高了回归精度 elif EIoU: rho_w2 = ((b2_x2 - b2_x1) - (b1_x2 - b1_x1)) ** beta rho_h2 = ((b2_y2 - b2_y1) - (b1_y2 - b1_y1)) ** beta cw2 = cw ** beta + eps ch2 = ch ** beta + eps return iou - (rho2 / c2 + rho_w2 / cw2 + rho_h2 / ch2) # GIoU https://arxiv.org/pdf/1902.09630.pdf c_area = torch.max(cw * ch + eps, union) # convex area return iou - torch.pow((c_area - union) / c_area + eps, alpha) # GIoU else: return iou # torch.log(iou+eps) or iou
References
即插即用| Alpha_IOU loss助力yolov5优化
损失函数之Focal-EIoU Loss
目标检测中的预测框回归优化之IOU、GIOU、DIOU、CIOU和EIOU
深度学习笔记(十三):IOU、GIOU、DIOU、CIOU、EIOU、Focal EIOU、alpha IOU损失函数分析及Pytorch实现