OpenCV-Python实战(4)——OpenCV常见图像处理技术(❤️万字长文,含大量示例❤️)
- 0. 前言
- 1. 拆分与合并通道
- 2. 图像的几何变换
- 2.1 缩放图像
- 2.2 平移图像
- 2.3 旋转图像
- 2.4 图像的仿射变换
- 2.5 图像的透视变换
- 2.6 裁剪图像
- 3. 图像滤波
- 3.1 应用滤波器(卷积核或简称为核)
- 3.2 图像平滑
- 3.2.1 均值滤波
- 3.2.2 高斯滤波
- 3.2.3 中值滤波
- 3.2.4 双边滤波
- 3.3 图像锐化
- 3.4 图像处理中的常用滤波器
- 总结
- 相关链接
0. 前言
图像处理技术是计算机视觉项目的核心,通常是计算机视觉项目中的关键工具,可以使用它们来完成各种计算机视觉任务。因此,如果要构建计算机视觉项目,就需要对图像处理有足够的了解。在本文中,将介绍计算机视觉项目中常见的图像处理技术,主要包括图像的几何变换和图像滤波等。
1. 拆分与合并通道
再进行图像处理时,有时我们仅需要使用特定通道。因此,必须首先将多通道图像拆分为多个单通道图像,为了拆分通道,可以使用 cv2.split() 函数,cv2.split() 函数将源多通道图像拆分为多个单通道图像。此外,处理完成后,可能希望将多个的单通道图像合并创建为一个多通道图像,为了合并通道,可以使用 cv2.merge() 函数,cv2.merge() 函数将多个单通道图像合并为一个多通道图像。
使用 cv2.split() 函数,从加载的 BGR 图像中获取三个通道:
# 通道拆分
image = cv2.imread('sigonghuiye.jpeg')
(b, g, r) = cv2.split(image)
使用 cv2.merge() 函数,将三个通道合并构建 BGR 图像:
# 通道合并
image_copy = cv2.merge((b, g, r))
需要注意的是,cv2.split() 是一个耗时的操作,所以应该只在绝对必要的时候使用它。作为替代,可以使用 NumPy 切片语法来处理特定通道。例如,如果要获取图像的蓝色通道:
b = image[:, :, 0]
此外,可以消除多通道图像的某些通道(通过将通道值设置为 0 ),得到的图像具有相同数量的通道,但相应通道中的值为 0;例如,如果要消除 BGR 图像的蓝色通道:
image_without_blue = image.copy()
image_without_blue[:, :, 0] = 0
消除其他通道的方法与上述代码原理相同:
# 红蓝通道
image_without_green = image.copy()
image_without_green[:,:,1] = 0
# 蓝绿通道
image_without_red = image.copy()
image_without_red[:,:,2] = 0
然后将得到的图像的通道拆分:
(b_1, g_1, r_1) = cv2.split(image_without_blue)
(b_2, g_2, r_2) = cv2.split(image_without_green)
(b_3, g_3, r_3) = cv2.split(image_without_red)
显示拆分后的通道:
def show_with_matplotlib(color_img, title, pos):
# Convert BGR image to RGB
img_RGB = color_img[:,:,::-1]
ax = plt.subplot(3, 6, pos)
plt.imshow(img_RGB)
plt.title(title,fontsize=8)
plt.axis('off')
image = cv2.imread('sigonghuiye.jpeg')
plt.figure(figsize=(13,5))
plt.suptitle('splitting and merging channels in OpenCV', fontsize=12, fontweight='bold')
show_with_matplotlib(image, "BGR - image", 1)
show_with_matplotlib(cv2.cvtColor(b, cv2.COLOR_GRAY2BGR), "BGR - (B)", 2)
show_with_matplotlib(cv2.cvtColor(g, cv2.COLOR_GRAY2BGR), "BGR - (G)", 2 + 6)
show_with_matplotlib(cv2.cvtColor(r, cv2.COLOR_GRAY2BGR), "BGR - (R)", 2 + 6 * 2)
show_with_matplotlib(image_merge, "BGR - image (merge)", 1 + 6)
show_with_matplotlib(image_without_blue, "BGR without B", 3)
show_with_matplotlib(image_without_green, "BGR without G", 3 + 6)
show_with_matplotlib(image_without_red, "BGR without R", 3 + 6 * 2)
show_with_matplotlib(cv2.cvtColor(b_1, cv2.COLOR_GRAY2BGR), "BGR without B (B)", 4)
show_with_matplotlib(cv2.cvtColor(g_1, cv2.COLOR_GRAY2BGR), "BGR without B (G)", 4 + 6)
show_with_matplotlib(cv2.cvtColor(r_1, cv2.COLOR_GRAY2BGR), "BGR without B (R)", 4 + 6 * 2)
# 显示其他拆分通道的方法完全相同,只需修改通道名和子图位置
# ...
plt.show()
代码运行结果如下:
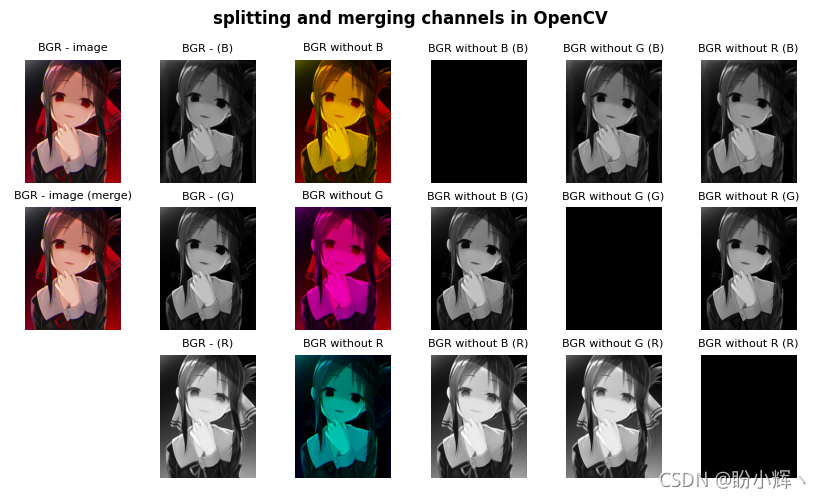
在上图中,也可以更好的看出 RGB 颜色空间的加法属性。例如,没有 B 通道的子图大部分是黄色的,这是因为 绿色+红色 会得到黄色值。
2. 图像的几何变换
几何变换主要包括缩放、平移、旋转、仿射变换、透视变换和图像裁剪等。执行这些几何变换的两个关键函数是 cv2.warpAffine() 和 cv2.warpPerspective()。
cv2.warpAffine() 函数使用以下 2 x 3 变换矩阵来变换源图像:
d
s
t
(
x
,
y
)
=
s
r
c
(
M
11
x
+
M
12
y
+
M
13
,
M
21
x
+
M
22
y
+
M
23
)
dst(x,y)=src(M_{11}x+M_{12}y+M_{13}, M_{21}x+M_{22}y+M_{23})
dst(x,y)=src(M11x+M12y+M13,M21x+M22y+M23)
cv2.warpPerspective() 函数使用以下 3 x 3 变换矩阵变换源图像:
d
s
t
(
x
,
y
)
=
s
r
c
(
M
11
x
+
M
12
y
+
M
13
M
31
x
+
M
32
y
+
M
33
,
M
21
x
+
M
22
y
+
M
23
M
31
x
+
M
32
y
+
M
33
)
dst(x,y)=src(\frac {M_{11}x+M_{12}y+M_{13}} {M_{31}x+M_{32}y+M_{33}}, \frac {M_{21}x+M_{22}y+M_{23}} {M_{31}x+M_{32}y+M_{33}})
dst(x,y)=src(M31x+M32y+M33M11x+M12y+M13,M31x+M32y+M33M21x+M22y+M23)
接下来,我们将了解最常见的几何变换技术。
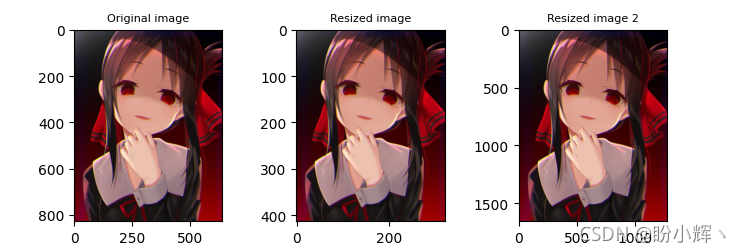
2.1 缩放图像
缩放图像时,可以直接使用缩放后图像尺寸调用 cv2.resize():
# 指定缩放后图像尺寸
resized_image = cv2.resize(image, (width * 2, height * 2), interpolation=cv2.INTER_LINEAR)
除了上述用法外,也可以同时提供缩放因子 fx 和 fy 值。例如,如果要将图像缩小 2 倍:
# 使用缩放因子
dst_image = cv2.resize(image, None, fx=0.5, fy=0.5, interpolation=cv2.INTER_AREA)
如果要放大图像,最好的方法是使用 cv2.INTER_CUBIC 插值方法(较耗时)或 cv2.INTER_LINEAR。如果要缩小图像,一般的方法是使用 cv2.INTER_LINEAR。
OpenCV 提供的五种插值方法如下表所示:
| 插值方法 | 原理 |
|---|---|
| cv2.INTER_NEAREST | 最近邻插值 |
| cv2.INTER_LINEAR | 双线性插值 |
| cv2.INTER_AREA | 使用像素面积关系重采样 |
| cv2.INTER_CUBIC | 基于4x4像素邻域的3次插值 |
| cv2.INTER_LANCZOS4 | 正弦插值 |
显示缩放后的图像:
def show_with_matplotlib(color_img, title, pos):
# Convert BGR image to RGB
img_RGB = color_img[:,:,::-1]
ax = plt.subplot(1, 3, pos)
plt.imshow(img_RGB)
plt.title(title,fontsize=8)
# plt.axis('off')
show_with_matplotlib(image, 'Original image', 1)
show_with_matplotlib(dst_image, 'Resized image', 2)
show_with_matplotlib(dst_image_2, 'Resized image 2', 3)
plt.show()
可以通过坐标系观察图片的缩放情况:
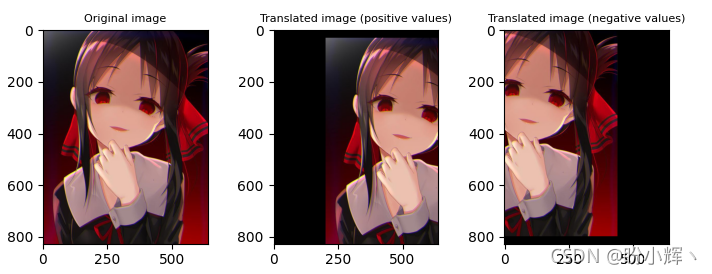
2.2 平移图像
为了平移对象,需要使用 NumPy 数组创建 2 x 3 变换矩阵,其中提供了 x 和 y 方向的平移距离(以像素为单位):
M = np.float32([[1, 0, x], [0, 1, y]])
其对应于以下变换矩阵:
[
1
0
t
x
0
1
t
y
]
\begin{bmatrix} 1 & 0 & t_x \\ 0 & 1 & t_y \end{bmatrix}
[1001txty]
创建此矩阵后,调用 cv2.warpAffine() 函数:
dst_image = cv2.warpAffine(image, M, (width, height))
cv2.warpAffine() 函数使用提供的 M 矩阵转换源图像。第三个参数 (width, height) 用于确定输出图像的大小。
例如,如果图片要在 x 方向平移 200 个像素,在 y 方向移动 30 像素:
height, width = image.shape[:2]
M = np.float32([[1, 0, 200], [0, 1, 30]])
dst_image_1 = cv2.warpAffine(image, M, (width, height))
平移也可以为负值,此时为反方向移动:
M = np.float32([[1, 0, -200], [0, 1, -30]])
dst_image_2 = cv2.warpAffine(image, M, (width, height))
显示图片如下:
2.3 旋转图像
为了旋转图像,需要首先使用 cv.getRotationMatrix2D() 函数来构建 2 x 3 变换矩阵。该矩阵以所需的角度(以度为单位)旋转图像,其中正值表示逆时针旋转。旋转中心 (center) 和比例因子 (scale) 也可以调整,使用这些元素,以下方式计算变换矩阵:
[
α
β
(
1
−
a
)
⋅
c
e
n
t
e
r
.
x
−
β
⋅
c
e
n
t
e
r
.
y
−
β
α
β
⋅
c
e
n
t
e
r
.
x
−
(
1
−
α
)
⋅
c
e
n
t
e
r
.
y
]
\begin{bmatrix} \alpha & \beta & (1-a)\cdot center.x-\beta\cdot center.y \\ -\beta & \alpha & \beta\cdot center.x-(1-\alpha)\cdot center.y \end{bmatrix}
[α−ββα(1−a)⋅center.x−β⋅center.yβ⋅center.x−(1−α)⋅center.y]
其中:
α
=
s
c
a
l
e
⋅
c
o
s
θ
,
β
=
s
c
a
l
e
⋅
s
i
n
θ
\alpha=scale\cdot cos\theta, \beta=scale\cdot sin\theta
α=scale⋅cosθ,β=scale⋅sinθ
以下示例构建 M 变换矩阵以相对于图像中心旋转 180 度,缩放因子为 1(不缩放)。之后,将这个 M 矩阵应用于图像,如下所示:
height, width = image.shape[:2]
M = cv2.getRotationMatrix2D((width / 2.0, height / 2.0), 180, 1)
dst_image = cv2.warpAffine(image, M, (width, height))
接下来使用不同的旋转中心进行旋转:
M = cv2.getRotationMatrix2D((width/1.5, height/1.5), 30, 1)
dst_image_2 = cv2.warpAffine(image, M, (width, height))
显示旋转后的图像:

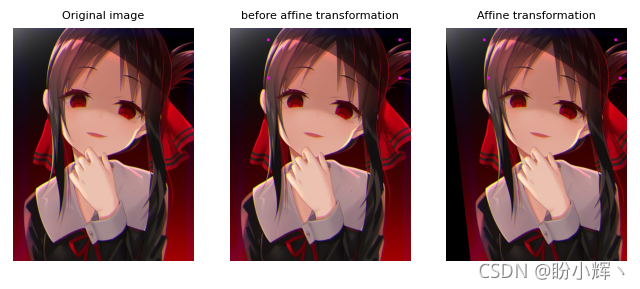
2.4 图像的仿射变换
在仿射变换中,首先需要使用 cv2.getAffineTransform() 函数来构建 2 x 3 变换矩阵,该矩阵将从输入图像和变换图像中的相应坐标中获得。最后,将 M 矩阵传递给 cv2.warpAffine():
pts_1 = np.float32([[135, 45], [385, 45], [135, 230]])
pts_2 = np.float32([[135, 45], [385, 45], [150, 230]])
M = cv2.getAffineTransform(pts_1, pts_2)
dst_image = cv2.warpAffine(image_points, M, (width, height))
仿射变换是保留点、直线和平面的变换。此外,平行线在此变换后将保持平行。但是,仿射变换不会同时保留像素点之间的距离和角度。
可以通过以下图像观察仿射变换的结果:
2.5 图像的透视变换
为了进行透视变换,首先需要使用 cv2.getPerspectiveTransform() 函数创建 3 x 3 变换矩阵。该函数需要四对点(源图像和输出图像中四边形的坐标),函数会根据这些点计算透视变换矩阵。然后,将 M 矩阵传递给 cv2.warpPerspective() :
pts_1 = np.float32([[450, 65], [517, 65], [431, 164], [552, 164]])
pts_2 = np.float32([[0, 0], [300, 0], [0, 300], [300, 300]])
M = cv2.getPerspectiveTransform(pts_1, pts_2)
dst_image = cv2.warpPerspective(image, M, (300, 300)
透视变换效果如下所示:

2.6 裁剪图像
可以使用 NumPy 切片裁剪图像:
dst_image = image[80:200, 230:330]
裁剪结果如下所示:

3. 图像滤波
在本节中,将介绍如何模糊和锐化图像,然后应用自定义核。此外,还将介绍一些用于执行其他图像处理功能的常见核。
3.1 应用滤波器(卷积核或简称为核)
OpenCV 提供了 cv2.filter2D() 函数,以将任意核应用于图像,将图像与提供的核进行卷积操作。为了使用此函数,首先需要构建将使用的核:
# 使用 5 x 5 核
kernel_averaging_5_5 = np.array([[0.04, 0.04, 0.04, 0.04, 0.04], [0.04,
0.04, 0.04, 0.04, 0.04], [0.04, 0.04, 0.04, 0.04, 0.04],[0.04, 0.04, 0.04,
0.04, 0.04], [0.04, 0.04, 0.04, 0.04, 0.04]])
以上示例创建了 5 x 5 平均卷积核,也可以使用以下方式创建卷积核核:
kernel_averaging_5_5 = np.ones((5, 5), np.float32) / 25
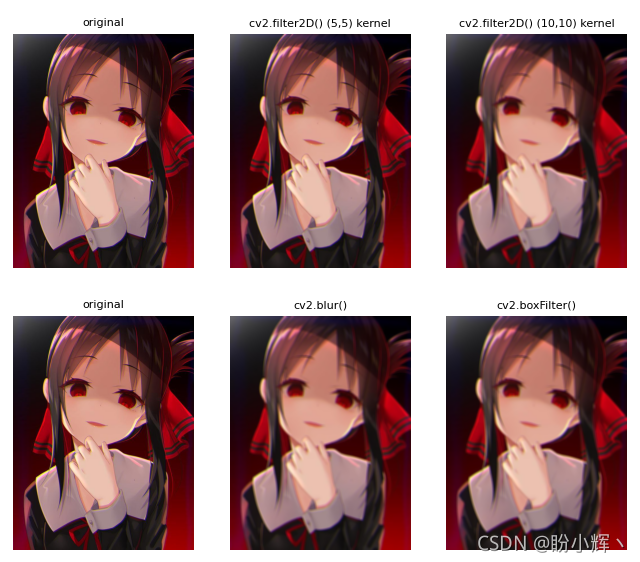
然后将应用 cv2.filter2D() 函数将核应用于源图像:
smooth_image_f2D = cv2.filter2D(image, -1, kernel_averaging_5_5)
上述方法可以将任意核应用于图像。示例中,创建了一个平均卷积核来平滑图像。或者,我们也可以使用 OpenCV 内置的函数,从而在无需创建核的情况下执行图像平滑(也称为图像模糊)。
3.2 图像平滑
平滑技术通常用于减少噪声,此外,这些技术还可用于减少低分辨率图像中的像素化。
3.2.1 均值滤波
可以使用 cv2.blur() 或 cv2.boxFilter() 通过将图像与核卷积来执行均值滤波,在使用 cv2.boxFilter() 时可以不执行规范化,只是取核区域下所有像素的平均值,并用这个平均值替换中心元素,可以控制核大小和锚点位置(默认情况下锚点位于核中心)。当 cv2.boxFilter() 的 normalize 参数等于 True 时,两个函数完全等价。两个函数都使用如下核平滑图像:
K
=
α
[
1
1
⋯
1
1
1
⋯
1
⋮
⋮
⋱
⋮
1
1
⋯
1
]
K=\alpha\begin{bmatrix} 1 & 1 & \cdots & 1 \\ 1 & 1 & \cdots & 1\\ \vdots&\vdots&\ddots&\vdots \\ 1 & 1 & \cdots & 1 \end{bmatrix}
K=α⎣⎢⎢⎢⎡11⋮111⋮1⋯⋯⋱⋯11⋮1⎦⎥⎥⎥⎤
cv2.boxFilter() 函数:
α
=
{
k
s
i
z
e
.
w
i
d
t
h
⋅
k
s
i
z
e
.
h
e
i
g
h
t
,
if normalize=true
1
,
otherwise
\alpha = \begin{cases} ksize.width\cdot ksize.height, & \text{if normalize=true} \\[2ex] 1, & \text{otherwise} \end{cases}
α=⎩⎨⎧ksize.width⋅ksize.height,1,if normalize=trueotherwise
在 cv2.blur() 函数的情况下:
α
=
k
s
i
z
e
.
w
i
d
t
h
⋅
k
s
i
z
e
.
h
e
i
g
h
t
\alpha = ksize.width\cdot ksize.height
α=ksize.width⋅ksize.height
换句话说, cv2.blur() 是使用归一化的 boxFilter():
# 以下两行代码是等价的
smooth_image_b = cv2.blur(image, (10, 10))
smooth_image_bfi = cv2.boxFilter(image, -1, (10, 10), normalize=True)
均值滤波后的图像如下所示:
3.2.2 高斯滤波
OpenCV 提供了 cv2.GaussianBlur() 函数用于高斯滤波,该函数使用高斯核对图像进行模糊处理。可以使用以下参数控制高斯核:ksize (核大小)、sigmaX (高斯核 x 方向的标准差) 和 sigmaY (高斯核 y 方向的标准差)。为了获取所应用的高斯核,可以使用 cv2.getGaussianKernel() 函数构建高斯核:
# (9, 9)表示高斯矩阵的长与宽都是5,标准差取0
smooth_image_gb = cv2.GaussianBlur(image, (9, 9), 0)
# 标准差取0.3
smooth_image_gb_2 = cv2.GaussianBlur(image, (9, 9), 0.3)
# 构建高斯核
print(cv2.getGaussianKernel(9,0))
高斯滤波后的图像如下所示:

3.2.3 中值滤波
OpenCV 提供了 cv2.medianBlur() 函数用于中值滤波,该函数使用中值核对图像进行模糊处理:
smooth_image_mb = cv2.medianBlur(image, 9)
smooth_image_mb_2 = cv2.medianBlur(image, 3)
此滤波器可用于减少图像中的椒盐噪声,效果如下:

3.2.4 双边滤波
cv2.bilateralFilter() 函数应用于输入图像可以执行双边滤波。与上述所有平滑滤波器倾向于全局平滑不同,此函数可用于在保持边缘锐利的同时减少噪声:
smooth_image_bf = cv2.bilateralFilter(image, 5, 10, 10)
双边滤波效果如下图所示:

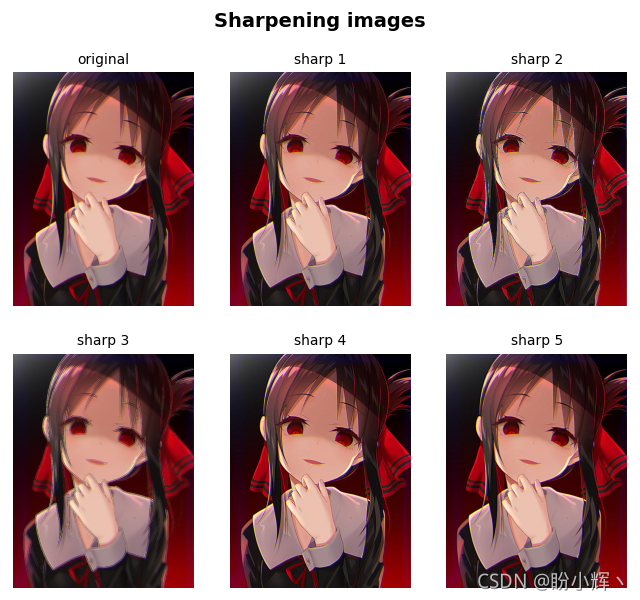
3.3 图像锐化
锐化图像的边缘的一种简单方法是执行非锐化蒙版 (unsharp masking),即从原始图像中减去图像的非锐化或平滑版本。在以下示例中,首先应用了高斯平滑滤波器,然后从原始图像中减去生成的图像:
smoothed = cv2.GaussianBlur(img, (9, 9), 10)
unsharped = cv2.addWeighted(img, 1.5, smoothed, -0.5, 0)
另一种方法是使用特定的核来锐化边缘,然后应用 cv2.filter2D() 函数:
kernel_sharpen_1 = np.array([[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]])
kernel_sharpen_2 = np.array([[-1, -1, -1],
[-1, 9, -1],
[-1, -1, -1]])
kernel_sharpen_3 = np.array([[1, 1, 1],
[1, -7, 1],
[1, 1, 1]])
kernel_sharpen_4 = np.array([[-1, -1, -1, -1, -1],
[-1, 2, 2, 2, -1],
[-1, 2, 8, 2, -1],
[-1, 2, 2, 2, -1],
[-1, -1, -1, -1, -1]]) / 8.0
sharp_image_1 = cv2.filter2D(image, -1, kernel_sharpen_1)
sharp_image_2 = cv2.filter2D(image, -1, kernel_sharpen_2)
sharp_image_3 = cv2.filter2D(image, -1, kernel_sharpen_3)
sharp_image_4 = cv2.filter2D(image, -1, kernel_sharpen_4)
锐化后图像输出如下所示:
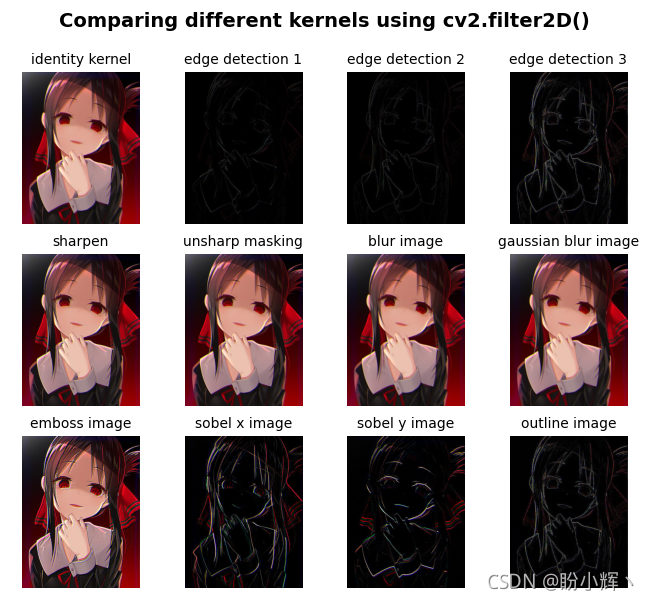
3.4 图像处理中的常用滤波器
还可以定义了一些用于不同目的的通用核,例如:边缘检测、平滑、锐化或浮雕等,定义内核后,可以使用 cv2.filter2D() 函数:
image = cv2.imread('sigonghuiye.jpeg')
kernel_identity = np.array([[0, 0, 0],
[0, 1, 0],
[0, 0, 0]])
# 边缘检测
kernel_edge_detection_1 = np.array([[1, 0, -1],
[0, 0, 0],
[-1, 0, 1]])
kernel_edge_detection_2 = np.array([[0, 1, 0],
[1, -4, 1],
[0, 1, 0]])
kernel_edge_detection_3 = np.array([[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]])
# 锐化
kernel_sharpen = np.array([[0, -1, 0],
[-1, 5, -1],
[0, -1, 0]])
kernel_unsharp_masking = -1 / 256 * np.array([[1, 4, 6, 4, 1],
[4, 16, 24, 16, 4],
[6, 24, -476, 24, 6],
[4, 16, 24, 16, 4],
[1, 4, 6, 4, 1]])
# 模糊
kernel_blur = 1 / 9 * np.array([[1, 1, 1],
[1, 1, 1],
[1, 1, 1]])
gaussian_blur = 1 / 16 * np.array([[1, 2, 1],
[2, 4, 2],
[1, 2, 1]])
# 浮雕
kernel_emboss = np.array([[-2, -1, 0],
[-1, 1, 1],
[0, 1, 2]])
# 边缘检测
sobel_x_kernel = np.array([[1, 0, -1],
[2, 0, -2],
[1, 0, -1]])
sobel_y_kernel = np.array([[1, 2, 1],
[0, 0, 0],
[-1, -2, -1]])
outline_kernel = np.array([[-1, -1, -1],
[-1, 8, -1],
[-1, -1, -1]])
# 应用卷积核
original_image = cv2.filter2D(image, -1, kernel_identity)
edge_image_1 = cv2.filter2D(image, -1, kernel_edge_detection_1)
edge_image_2 = cv2.filter2D(image, -1, kernel_edge_detection_2)
edge_image_3 = cv2.filter2D(image, -1, kernel_edge_detection_3)
sharpen_image = cv2.filter2D(image, -1, kernel_sharpen)
unsharp_masking_image = cv2.filter2D(image, -1, kernel_unsharp_masking)
blur_image = cv2.filter2D(image, -1, kernel_blur)
gaussian_blur_image = cv2.filter2D(image, -1, gaussian_blur)
emboss_image = cv2.filter2D(image, -1, kernel_emboss)
sobel_x_image = cv2.filter2D(image, -1, sobel_x_kernel)
sobel_y_image = cv2.filter2D(image, -1, sobel_y_kernel)
outline_image = cv2.filter2D(image, -1, outline_kernel)
总结
在本文中,介绍了计算机视觉项目中常见的图像处理技术,主要包括图像的几何变换和图像滤波等。
相关链接
OpenCV-Python实战(1)——OpenCV简介与图像处理基础(内含大量示例,📕建议收藏📕)
OpenCV-Python实战(2)——图像与视频文件的处理(两万字详解,️📕建议收藏📕)
OpenCV-Python实战(3)——OpenCV中绘制图形与文本(万字总结,️📕建议收藏📕)