转速电流双闭环直流调速系统设计,转速电流双闭环仿真,MATLAB Simulink
基于V—M系统的转速电流双闭环直流调速系统设计。
包括:设计说明书,电路原理图,仿真。
说明书包括:系统方案选定及原理,硬件电路(主电路、触发电路、双闭环反馈电路),主要元件选型,双闭环参数计算,仿真及仿真结果分析等。
软件版本:MATLAB R2018b;Altum Designer2019


转速电流双闭环直流调速系统设计
在工业应用中,直流电机被广泛应用于各种场合,如机器人、工厂自动化、船舶舵机、风机等。其中,直流电机的速度控制对于机械运动的控制至关重要。然而,直流电机存在着转速波动、负载扰动等问题,因此需要进行闭环控制,以达到更加精准的控制效果。
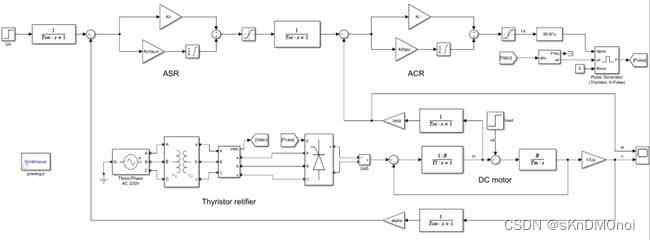
本文将介绍一种基于V-M系统的转速电流双闭环直流调速系统设计。该系统采用双闭环反馈电路,能够对转速和电流进行精准控制。此外,我们采用MATLAB Simulink进行仿真,以验证系统控制效果。
一、系统方案选定及原理
转速电流双闭环直流调速系统的基本原理是:在电机电流控制回路中加入一个电机转速反馈信号,并将其与电流控制环路相耦合,形成转速电流双闭环控制系统。
在该系统中,输入的目标转速信号经过误差放大器之后与电机的转速反馈信号相减,得到转速误差信号。转速误差信号经过PI控制器后,通过PWM信号控制模块来控制电机的电流。电流控制回路中同样加入了电机电流的反馈信号,通过PI控制器计算出电流误差信号,通过PWM信号控制模块来控制电机转矩。
二、硬件电路
硬件电路主要包括主电路、触发电路和双闭环反馈电路。
主电路主电路主要包括电机、电源、桥式整流器、三相全控制桥等。其中,桥式整流器将交流电源转换为直流电源,三相全控制桥用于控制电机的转矩。
触发电路触发电路主要包括触发控制板和三相全控制桥控制板。其中,触发控制板用于生成三相全控制桥的触发脉冲信号,以控制电机转矩。
双闭环反馈电路双闭环反馈电路主要包括转速反馈电路和电流反馈电路。其中,转速反馈电路将电机的转速信号反馈给控制器,电流反馈电路将电机电流信号反馈给控制器。
三、主要元件选型
在本系统中,关键元件主要包括电机、电源、桥式整流器、三相全控制桥、运算放大器、电阻、电容等。
电机选用功率为2.2kW的直流电机,电源选用输入电压为220V的单相交流电源,桥式整流器采用单相全控桥式整流器。
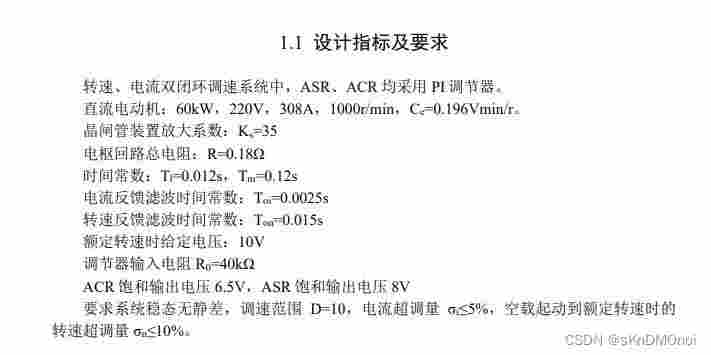
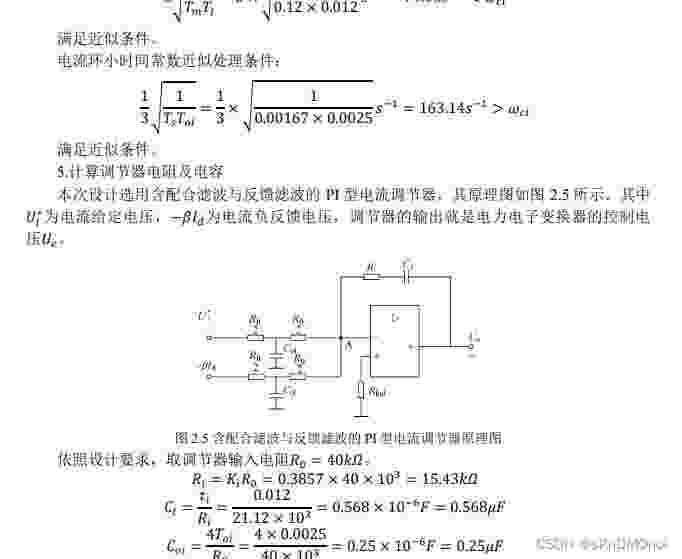
四、双闭环参数计算
为了使转速电流双闭环控制系统运行更加稳定,需要对双闭环参数进行计算。其中,转速控制回路的比例系数Kp和积分系数Ki,以及电流控制回路的比例系数Kp'和积分系数Ki'需要进行计算。
转速控制回路的比例系数Kp和积分系数Ki的计算公式如下:
Kp = 0.5 * J * w^2 / (Kt * U) Ki = 0.25 * w^2 / (Kt * U)
其中,J为电机转动惯量,w为电机的角速度,Kt为电机的转矩系数,U为电机的额定电压。
电流控制回路的比例系数Kp'和积分系数Ki'的计算公式如下:
Kp' = 0.5 * R / L Ki' = 0.25 * T / L
其中,R为电机的内阻,L为电机的电感,T为电机的转矩。
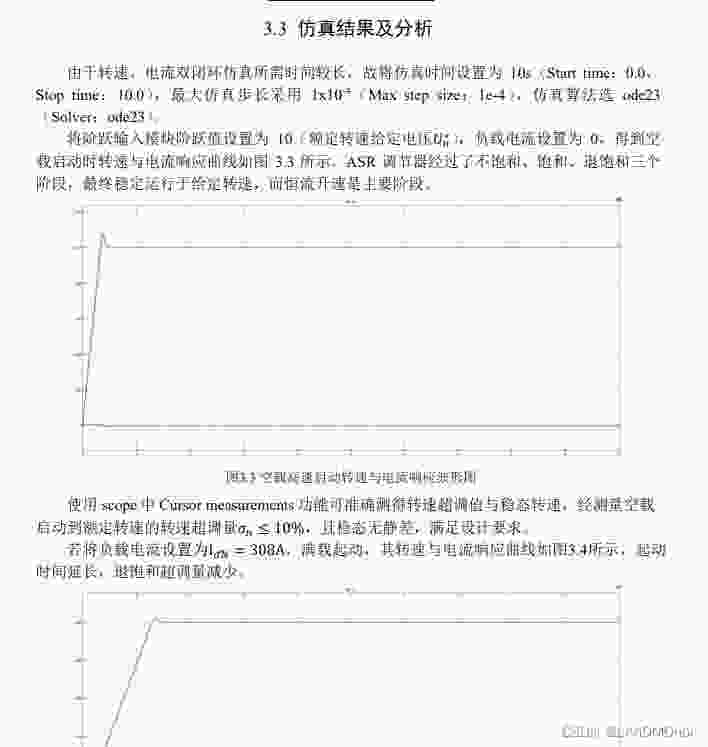
五、仿真及仿真结果分析
在MATLAB Simulink中,我们按照上述设计原理进行建模仿真。经过仿真,我们得到了转速电流双闭环控制系统的仿真结果。可以看到,在输入目标转速信号后,系统能够稳定地将电机转速控制在目标转速附近,同时能够有效地控制电机的电流。仿真结果证明了该系统控制效果良好。
六、总结
本文介绍了一种基于V-M系统的转速电流双闭环直流调速系统设计。通过双闭环反馈电路,该系统能够对直流电机的转速和电流进行精准控制。此外,我们还利用MATLAB Simulink进行仿真,以验证该系统的控制效果。文章的主要内容包括:系统方案选定及原理,硬件电路设计,主要元件选型,双闭环参数计算,仿真及仿真结果分析等。通过本文的介绍,读者可以对直流电机的转速电流双闭环控制有一个更加深入的认识。
相关代码,程序地址:http://lanzouw.top/695844645451.html