Content
建立动作和观测的数据结构创建环境根据观测、动作、环境step和reset函数创建环境测试环境是否符合要求 网络创建Critic网络设置Critic网络训练参数Actor网络设置Actor网络训练参数 创建智能体设置训练参数开始训练 MATLAB强化学习step函数文件和reset函数文件编写reset函数文件step函数文件注意 MATLAB 强化学习2(以PPO为例)整体代码测试Agent关于PPO的actor
建立动作和观测的数据结构
动作和观测可以分为两种:rlNumericSpec和rlFiniteSetSpec。
obsInfo = rlNumericSpec([3 1],... % 创建一个3x1的观测矩阵 'LowerLimit',[-inf -inf 0 ]',... 'UpperLimit',[ inf inf inf]');obsInfo.Name = 'observations';obsInfo.Description = 'integrated error, error, and measured height';numObservations = obsInfo.Dimension(1); % 取观测矩阵的维度 这句不要也行actInfo = rlNumericSpec([1 1]);actInfo.Name = 'flow';numActions = actInfo.Dimension(1);% 这句不要也行HRV_guide实例:
numObs = 8;ObservationInfo = rlNumericSpec([8 1]);ObservationInfo.Name = 'States & Delta';ObservationInfo.Description = 'r, V, lon, lat, gamma, psi, delta_lon, delta_lat';numAct = 1;ActionInfo = rlNumericSpec([1 1],... 'LowerLimit',[MIN_action]',... 'UpperLimit',[MAX_action]'); % 连续的输入空间ActionInfo.Name = 'Guidance Action';创建环境
根据观测、动作、环境step和reset函数创建环境
env = rlFunctionEnv(obsInfo,actInfo,stepfcn,resetfcn)
stepfcn为自己写的环境的step函数,resetfcn为环境的重置函数。
HRV_guide实例:
env = rlFunctionEnv(ObservationInfo,ActionInfo,'Hyper_Guidance_StepFunction','Hyper_Guidance_ResetFunction');测试环境是否符合要求
% 测试环境变量rng(0); % 随机数种子InitialObs = reset(env)[NextObs,Reward,IsDone,LoggedSignals] = step(env,simulation_step);NextObsReward如果正常打印说明至少架构层面没有问题。
网络创建
Critic网络
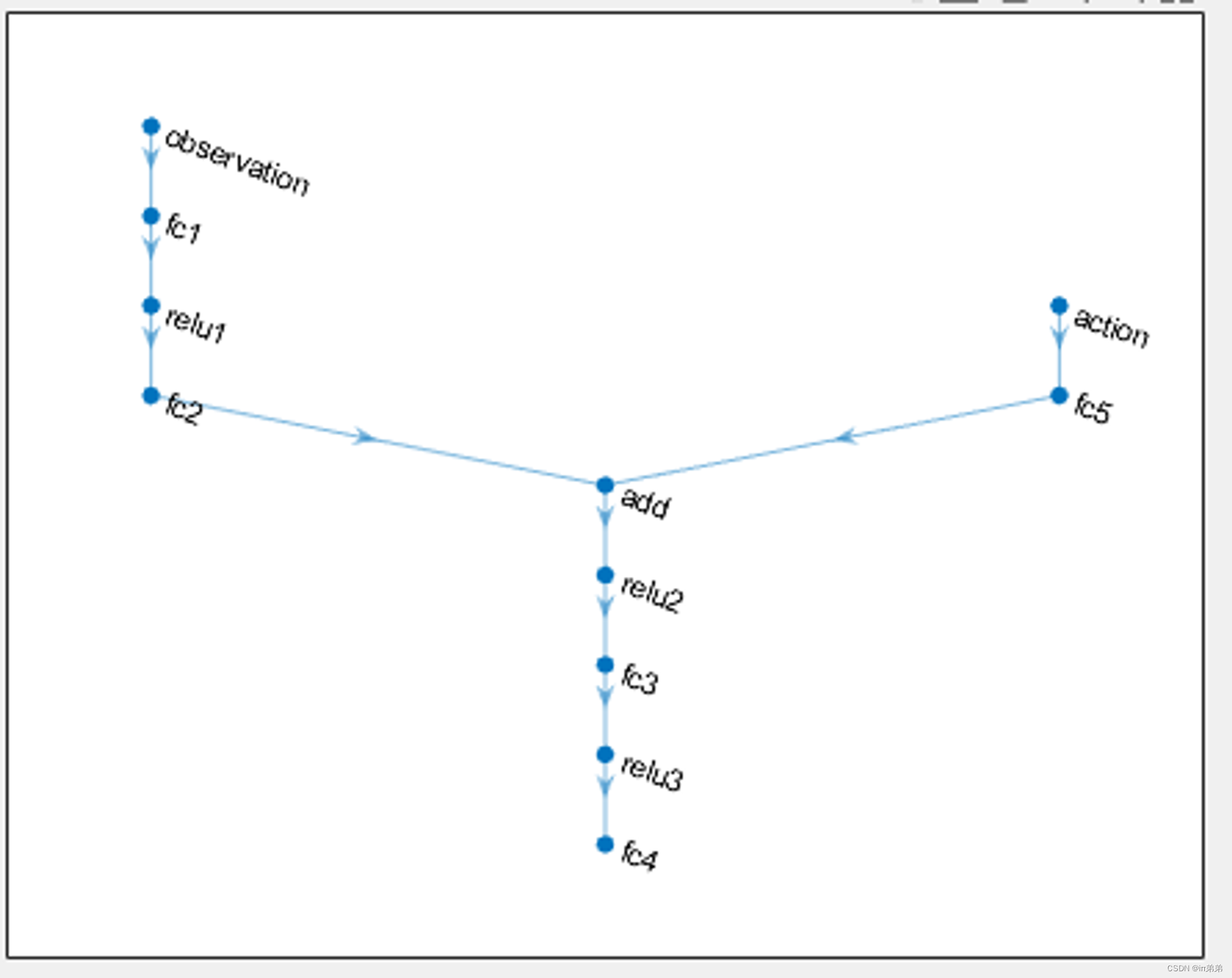
% 网络创建hiddenLayerSize = 128;observationPath = [ imageInputLayer([numObs,1],'Normalization','none','Name','observation') fullyConnectedLayer(hiddenLayerSize,'Name','fc1') reluLayer('Name','relu1') fullyConnectedLayer(hiddenLayerSize,'Name','fc2') additionLayer(2,'Name','add') reluLayer('Name','relu2') fullyConnectedLayer(hiddenLayerSize,'Name','fc3') reluLayer('Name','relu3') fullyConnectedLayer(1,'Name','fc4')];actionPath = [ imageInputLayer([numAct,1],'Normalization','none','Name','action') fullyConnectedLayer(hiddenLayerSize,'Name','fc5')];% Create the layer graph.criticNetwork = layerGraph(observationPath);criticNetwork = addLayers(criticNetwork,actionPath);% Connect actionPath to observationPath.criticNetwork = connectLayers(criticNetwork,'fc5','add/in2');matlab2020a不支持featureInputLayer,换为imageInputLayer。additionLayer在网络中添加了一个连接点(输入number为2),之后先用layerGraph建图,然后将action的输入网络和critic的基础网络(Q网络需要输入s和a,所以这么设)在连接点连上(criticNetwork = connectLayers(criticNetwork,'fc5','add/in2');)。Critic网络图如下:
设置Critic网络训练参数
criticOptions = rlRepresentationOptions('LearnRate',1e-03,'GradientThreshold',1);critic = rlQValueRepresentation(criticNetwork,ObservationInfo,ActionInfo,... 'Observation',{'observation'},'Action',{'action'},criticOptions);Actor网络
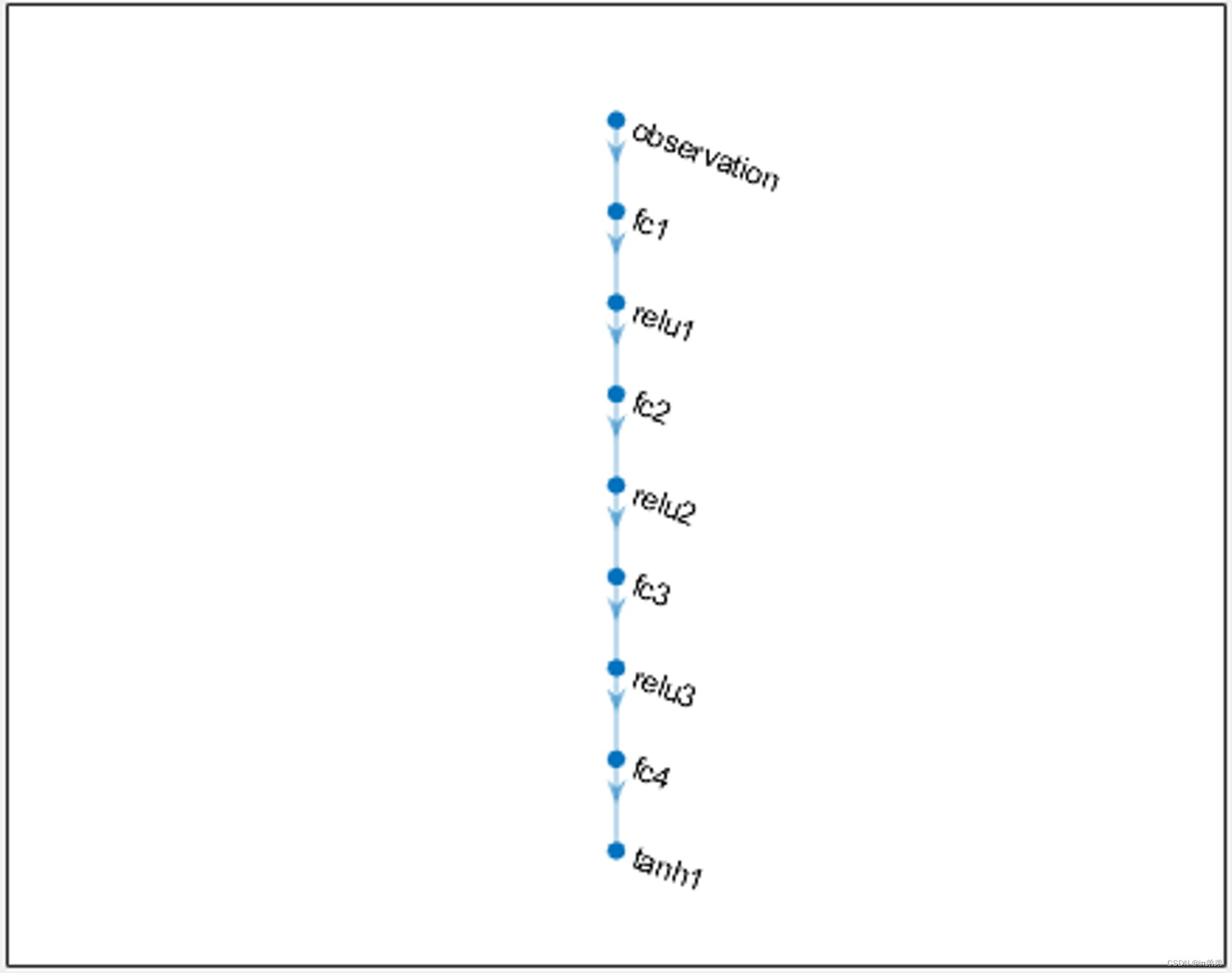
actorNetwork = [ imageInputLayer([numObs,1],'Normalization','none','Name','observation') fullyConnectedLayer(hiddenLayerSize,'Name','fc1') reluLayer('Name','relu1') fullyConnectedLayer(hiddenLayerSize,'Name','fc2') reluLayer('Name','relu2') fullyConnectedLayer(hiddenLayerSize,'Name','fc3') reluLayer('Name','relu3') fullyConnectedLayer(numAct,'Name','fc4') tanhLayer('Name','tanh1')];查看一下Actor a = π(s)网络结构:
plot(layerGraph(actorNetwork))
设置Actor网络训练参数
actorOptions = rlRepresentationOptions('LearnRate',1e-04,'GradientThreshold',1); % use gpu 'UserDevice','gpu'actor = rlDeterministicActorRepresentation(actorNetwork,ObservationInfo,ActionInfo,... 'Observation',{'observation'},'Action',{'tanh1'},actorOptions);这里 rlDeterministicActorRepresentation 中需要说明观测是网络中的那个节点,动作输出是那个节点。
创建智能体
agentOptions = rlDDPGAgentOptions(... 'SampleTime',simulation_step,... 'TargetSmoothFactor',1e-3,... 'ExperienceBufferLength',1e6 ,... 'DiscountFactor',0.99,... 'MiniBatchSize',256);agentOptions.NoiseOptions.Variance = 1e-1;agentOptions.NoiseOptions.VarianceDecayRate = 1e-6;agent = rlDDPGAgent(actor,critic,agentOptions);'SampleTime’默认的就是1,具体含义目前不太清楚。
设置训练参数
maxepisodes = 1500;maxsteps = ceil(Max_simulation_time/simulation_step);trainingOptions = rlTrainingOptions(... 'MaxEpisodes',maxepisodes,... 'MaxStepsPerEpisode',maxsteps,... 'StopOnError',"on",... 'Verbose',false,... 'Plots',"training-progress",... 'StopTrainingCriteria',"AverageReward",... 'StopTrainingValue',415,... 'ScoreAveragingWindowLength',10,... 'SaveAgentCriteria',"EpisodeReward",... 'SaveAgentValue',415);这里面有并行多进程的设置,但是并行的toolbox需要另外下载和配置。Verbose设置为true将在命令端打印训练中的reward。
开始训练
trainingStats = train(agent,env,trainingOptions);MATLAB强化学习step函数文件和reset函数文件编写
reset函数文件
这个函数起始名如下(不需要输入):
function [InitialObservation, LoggedSignal] = Hyper_Guidance_ResetFunction()LoggedSignal在我看来就是一个记录需要的数据(可能是状态)的句柄,InitialObservation就是初始状态的设置(需要和之前定义的状态维度保持一致。下面给出一个在该函数中返回值的例子:
LoggedSignal.State = [INIT_r/r_scale;INIT_V/V_scale;INIT_theta;INIT_phi;INIT_gamma;INIT_psi;];InitialObservation = [State_Obs_norm_1;State_Obs_norm_2;State_Obs_norm_3;State_Obs_norm_4;State_Obs_norm_5;State_Obs_norm_6;State_Obs_norm_7;State_Obs_norm_8];step函数文件
这个函数起始名如下:
function [NextObs,Reward,IsDone,LoggedSignals] = Hyper_Guidance_StepFunction(Action,LoggedSignals)可以看到step函数传入也有句柄 LoggedSignal,可以理解为通信句柄,在step函数内对它进行更新,所以输出也有 LoggedSignal。给出一个案例:高超声速飞行器在每一次step时通过 LoggedSignal拿到其6个状态变量的值,计算出 NextObs即下一时刻的观测值(注意状态变量时针对飞行器动力学模型而言的,观测值是我们定义在强化学习问题中的,可以理解为一个映射 s → obs)
Action就是传入的动作(使用它的时候别忘了其维度是之前设置的维度)。
设置好Reward机制和Done条件后这个文件就算写好了。
注意
在创建环境中:rlFunctionEnv(ObservationInfo,ActionInfo,'Hyper_Guidance_StepFunction','Hyper_Guidance_ResetFunction');
传入的函数名称要与我们写的reset和step文件名称相同。
MATLAB 强化学习2(以PPO为例)
matlab PPO既支持连续动作也支持离散动作。
numObs = 3; numAct = 2;如果是连续动作:
actionInfo = rlNumericSpec([numAct 1],'LowerLimit',-1,'UpperLimit',1); % 连续的动作空间如果是离散动作:
actionInfo = rlFiniteSetSpec(1:8) % 离散动作空间(8g)对于观测,这里假设是连续的:
obsInfo = rlNumericSpec([numObs 1],... % 创建一个3x1的观测矩阵 'LowerLimit',[-inf -inf 0 ]',... 'UpperLimit',[ inf inf inf]');obsInfo.Name = 'observations';创建环境:
env = rlFunctionEnv(obsInfo,actionInfo,'StepFunction','ResetFunction');整体代码
numObs = 3; numAct = 2;obsInfo = rlNumericSpec([numObs 1],... % 创建一个3x1的观测矩阵 'LowerLimit',[-inf -inf 0 ]',... 'UpperLimit',[ inf inf inf]');obsInfo.Name = 'observations';% actionInfo = rlNumericSpec([numAct 1],...% 'LowerLimit',-1,...% 'UpperLimit',1); % 连续的动作空间actionInfo = rlFiniteSetSpec([numAct 1]) % 离散动作空间actionInfo.Name = 'Guidance Action';env = rlFunctionEnv(obsInfo,actionInfo,'StepFunction','ResetFunction');rng(0)criticLayerSizes = [200 100];actorLayerSizes = [200 100];criticNetwork = [imageInputLayer([numObs 1 1],'Normalization','none','Name','observation') fullyConnectedLayer(criticLayerSizes(1),'Name','CriticFC1') reluLayer('Name','CriticRelu1') fullyConnectedLayer(criticLayerSizes(2),'Name','CriticFC2') reluLayer('Name','CriticRelu2') fullyConnectedLayer(1,'Name','CriticOutput')];criticOpts = rlRepresentationOptions('LearnRate',1e-3);critic = rlValueRepresentation(criticNetwork,env.getObservationInfo, ... 'Observation',{'observation'},criticOpts);actorNetwork = [imageInputLayer([numObs 1 1],'Normalization','none','Name','observation') fullyConnectedLayer(actorLayerSizes(1),'Name','ActorFC1') reluLayer('Name','ActorRelu1') fullyConnectedLayer(actorLayerSizes(2),'Name','ActorFC2') reluLayer('Name','ActorRelu2') fullyConnectedLayer(numAct,'Name','Action') tanhLayer('Name','ActorTanh1') ]; % 如为连续动作最后一层fullyConnectedLayer(2*numAct,'Name','Action')actorOptions = rlRepresentationOptions('LearnRate',1e-3);actor = rlStochasticActorRepresentation(actorNetwork,env.getObservationInfo,env.getActionInfo,... 'Observation',{'observation'}, actorOptions);opt = rlPPOAgentOptions('ExperienceHorizon',512,... 'ClipFactor',0.2,... 'EntropyLossWeight',0.02,... 'MiniBatchSize',64,... 'NumEpoch',3,... 'AdvantageEstimateMethod','gae',... 'GAEFactor',0.95,... 'DiscountFactor',0.9995);agent = rlPPOAgent(actor,critic,opt);trainOpts = rlTrainingOptions(... 'MaxEpisodes',20000,... 'MaxStepsPerEpisode',1200,... 'Verbose',false,... 'Plots','training-progress',... 'StopTrainingCriteria','AverageReward',... 'StopTrainingValue',10000,... 'ScoreAveragingWindowLength',100,... 'SaveAgentCriteria',"EpisodeReward",... 'SaveAgentValue',11000);trainingStats = train(agent,env,trainOpts);这里如果动作空间是连续的,那么actor网络的输出维度是numAct即动作维度的两倍(因为对于动作的每一个维度需要生成一个μ和一个σ来产生高斯分布作为策略π)。
step函数和reset函数和ddpg例子中一样,如果是离散的动作,传入的Action为[1, numAct]中某个整数。
测试Agent
只需要load自动保存在savedAgents下的模型即可,名字为saved_agent:
simSteps = 60;simOptions = rlSimulationOptions('MaxSteps',simSteps);experience = sim(env,saved_agent,simOptions);simActionSeries = reshape(experience.Action.GuidanceAction.Data, simSteps+1, 1);上面这段代码可以获得size为61的Action序列。
关于PPO的actor
ppo的actor在连续动作下输出是num of action的两倍,比如两个连续动作,则输出为4*1,其中第一个维度和第二个维度为动作的均值,第三个和第四个维度是标准差,matlab自带的sim是将这个4维输出建立两个高斯分布再去采样,如果要转c自己写前向传播可以直接取两个均值作为输出即可,这样就成为确定性策略了。