张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 - 第17632页
gpt4人工智能怎么下载-chatgpt哪里下载
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 280次
GPTChat是一种使用基于深度学习的自然语言处理模型(GPT)实现的智能对话系统。GPT模型是一种Transformer模型,由OpenAI实现,可用于生成各种类型的文本,包括对话文本。GPTChat通过对话实现用户与机器之间的交互。用户可以通过输入文本消息与系统进行交互,系统会根据对话历史和当前消息生成适当的响应。GPTChat的训练数据集通常基于人类生成的对话,以保证生成的文本与人类对话类似。使用GPTChat时,您可以选择将其集成到您的应用程序或网站中,也可以在一些在线平台上使用,例如Telegram和Discord。通常,您需要训练GPT模型,采用有意义的对话数据和有意义的提示和激活响应函数,才能获得高质量和自然的响应。以下是几个示例:HappyChat(快乐聊天):
好玩的chatgpt网站
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 307次

总结几个好玩⭐替代ChatGPT网站??查特尼克??工艺?♂️??冯迪??游标(GPT4.0)?♀️??坡(GPT4.0)?♀️?瑞特?♀️✅?免费GPT?♀️?优GPT?♀️?碧玉?ChatGPT镜像网站?♀️✅?白聊?♀️✅?为AI聊天?♀️✅?快速GPT?♀️✅?聊天35?♀️✅?免费GPT?大厂原版✔️OpenAIChatGPT✔️新必应✔️概念✔️百度文心一言?进阶?拥抱的脸?国内前沿AI?写作猫?网址导航✅未来百科?♂️?冯迪?细分领域?AI绘画✅Jrnylist(关键词参考)✅Noonshot(生成Midjourney关键词)?♀️?
vue-数据绑定
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 378次
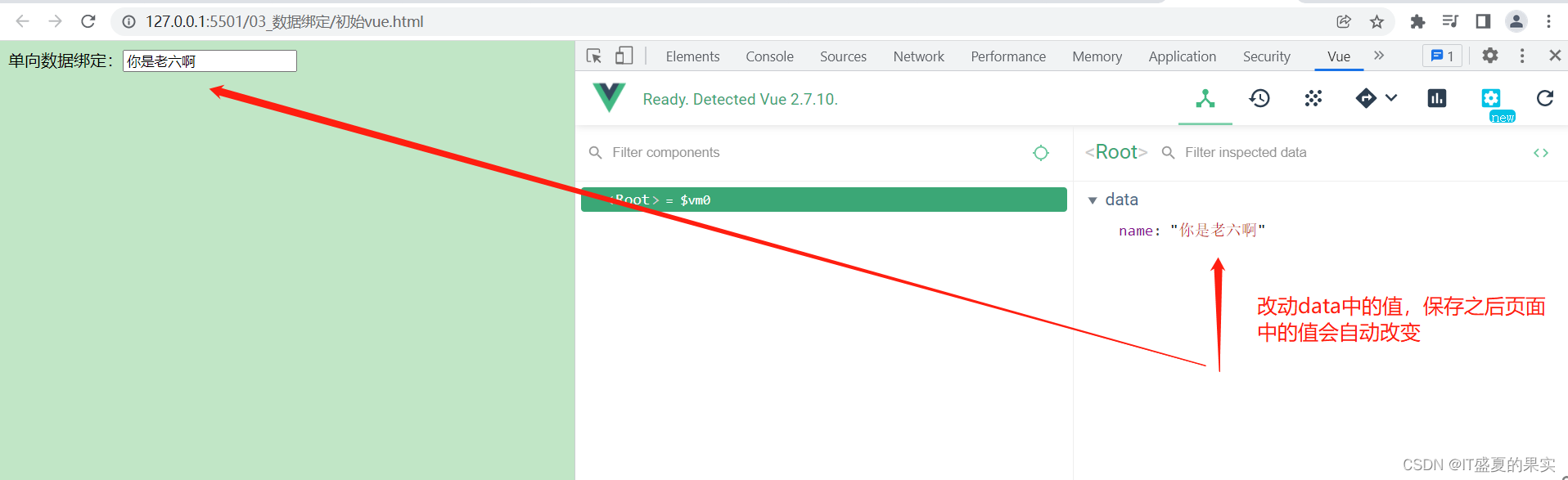
目录1数据绑定2绑定方式2.1单向绑定2.2双向绑定1数据绑定Vue中有两种数据绑定方式: 1单向绑定(v-bind):数据只能从data流向页面。 2双向绑定(v-modle):数据不仅能从data流向页面,还能从页面流向data 注意:1双向绑定一般都应用在表单项元素上(如:input、select)2.v-modle:value可以简写v-modle,因为v-modle默认收集的就是value值2绑定方式2.1单向绑定<body><divid="root">单向数据绑定:<inputtype="text"v-bind:value="name">
C# 获取本机IP地址,IPv4,IPv6(保姆级)
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 286次
每日一遍:今天你学习了吗?前言:在我们使用C#WinForm中,我们有时候是需要或者自己本机的IP地址进行处理,今天我们学习一下如何使用C#Winform获取主机的IP地址。现在博主手把手教你获取,很简单的。操作步骤一,创建文件创建Winform窗体文件,这里我就不多做介绍,你们可以看看我之前的文章,都是保姆级的。二,窗体设计我们从winform工具箱拖动textbox,和一个按钮,对按钮重命名三,代码设计3.1双击按钮进入代码设计窗口,添加命名空间,也可不添加,等下输入代码时使用快捷键也是可以的,Alt+Enter,使用ALT键+回车。usingSystem.Net;usingSystem.Net.Sockets;3.2输入代码IPAdd
Python进行ffmpeg推流和拉流rtsp、rtmp
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 284次
流媒体协议,英文学名StreamingProtocol,用一句人话来解释:流媒体协议是一种用于通过Web传递多媒体的协议。传统视频流协议:RTMP和RTSP,其中RTMP是基于TCP开发的,那么RTSP使用到了UDP。1.RTMP(RealTimeMessagingProtocol,实时消息协议)底层协议:TCP视频编解码器:H.264音频编解码器:AAC延迟:3-30秒RTMP的最大优点是可以在服务器和客户端服务器之间保持稳定的连接,无论用户的互联网连接质量如何,它都可以无缝低延迟进行流媒体传输。这个技术主要通过将数据流分成相等的小部分(音频数据默认为64字节,视频数据默认为128字节)并将它们顺序传输到接收设备,然后将它们重新组合成视频流
C语言链表超详解
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 327次
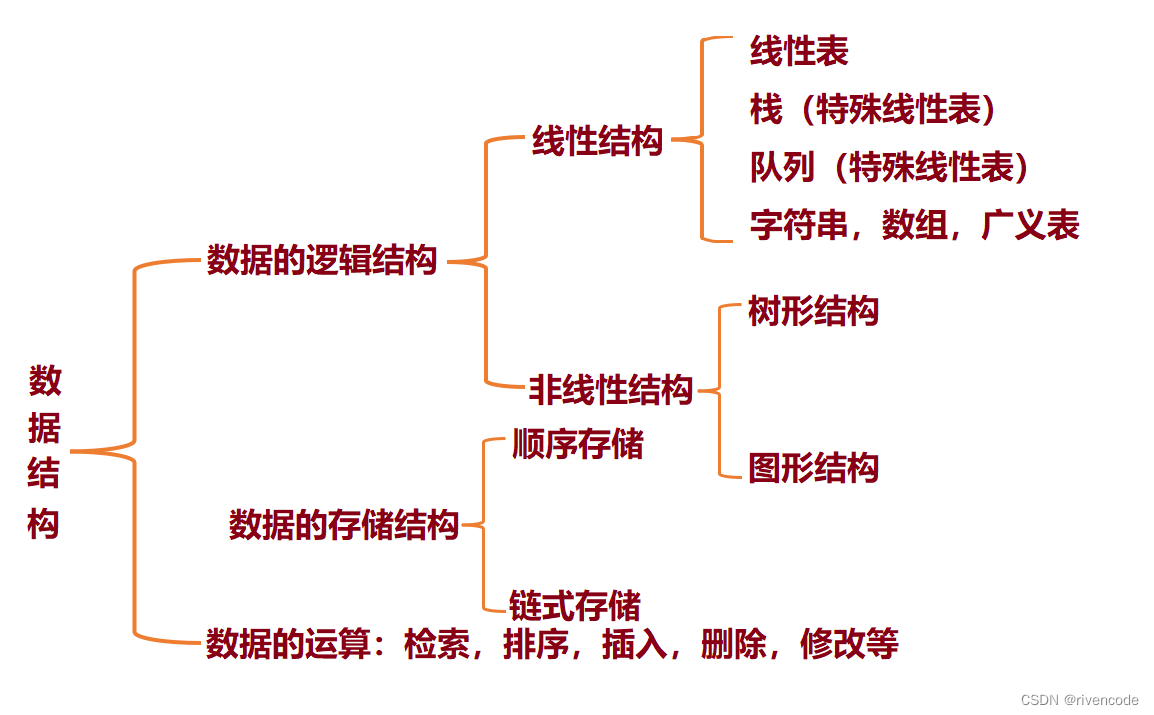
✅作者简介:嵌入式入坑者,与大家一起加油,希望文章能够帮助各位!!!!?个人主页:@rivencode的个人主页?系列专栏:玩转数据结构?推荐一款模拟面试、刷题神器,从基础到大厂面试题?点击跳转刷题网站进行注册学习目录一.顺序表与链表的对比二.单链表的介绍三.单链表的基本操作打印链表清空链表创建节点尾插结点头插结点尾删结点头删结点查找值为x的节点在pos前面插入一个结点删除pos指针指向的结点四.链表结构介绍五.双向带头循环链表创建结点链表初始化销毁链表清空链表打印链表尾插结点头插结点尾删结点头删结点查找节点值为x的结点在pos前面插入一个结点删除pos指针指向的结点链表长度六.总结一.顺序表与链表的对比线性表线性表(linearlist)是n个具有相同特性的数据
CSS中 设置( 单行、多行 )超出显示省略号
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 293次
1.设置超出显示省略号css设置超出显示省略号可分两种情况:单行文本溢出显示省略号…多行文本溢出显示省略号…但使用的核心代码是一样的:需要先使用“overflow:hidden;”来把超出的部分隐藏,然后使用“text-overflow:ellipsis;”当文本超出时显示为省略号。overflow:hidden;不显示超过对象尺寸的内容,就是把超出的部分隐藏了;text-overflow:ellipsis;当文本对象溢出是显示…,当然也可是设置属性为clip不显示点点点;单行文本溢出显示省略号<divclass="wrap"><divclass="content">测试数据:css单行文本超出长度显示省略号--明天也要努力</
惯性导航定位技术
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 286次
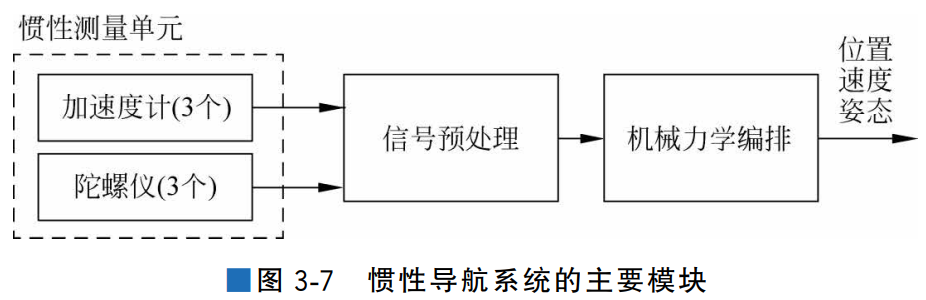
1惯性导航定位技术介绍惯性是所有质量体本身的基本属性。建立在牛顿定律基础上的惯性导航系统不与外界发生任何光电联系,仅靠系统本身就能对汽车进行连续的三维定位和三维定向。由于惯性导航系统这种能自主地、隐蔽地获取汽车完备运动信息的优势是诸如GNSS等其他定位系统无法比拟的,所以惯性导航系统一直是自动驾驶中获取汽车位姿数据的重要手段。惯性导航定位是一门跨多学科的技术,涉及近代数学、物理学、力学、光学、材料学、微电子和计算机等诸多领域,内容较为丰富[14]。本节将从系统简介、工作原理、误差分析等方面对惯性导航定位系统进行介绍。2惯性导航定位系统简介惯性导航系统是一种不依赖于外部信息,也不向外部辐射能量的自主式导航系统[15]。其主要由惯性测量单元、信号预处理和机械力学编排3个模块组成
ROS 教程——从入门到入土
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 286次
文章目录安装ROS设置sources.list安装密钥安装ROS主体程序设置环境参数rosdep初始化运行示例rqt-robot-steering基本信息测试rqt-robot-steering从GitHub下载运行3D示例创建软件包publisher发布者节点C++实现增加消息发送频率控制subscriber订阅者节点C++实现订阅者消息显示增加时间戳多个发布者与多个订阅者实现编写运行launch文件publisher发布者节点python实现subscriber订阅者节点python实现机器人运动控制C++实现创建软件包机器人运动控制python实现使用RViz观测传感器数据激光雷达数据结构
search zhannei
最新文章
-
- 撕毁替身契约,溺列表_撕毁替身契约,溺(陈默,向晴,林国栋)
- 长生医仙我用医美对抗亚洲三大邪术(江如韵凌成云),长生医仙我用医美对抗亚洲三大邪术
- 重生四合院,傻柱不做大冤种_重生四合院,傻柱不做大冤种
- 老婆和36名男子恋爱,我建了个男友群(邱敏赵德福),老婆和36名男子恋爱,我建了个男友群
- 完结文被他白月光抽签选夫后,我闪婚了列表_完结文被他白月光抽签选夫后,我闪婚了(陈熙贺涵洲)
- 舍友请全班买Labubu,结账超10亿后她慌了无广告_赵雪陈锋林瑶番茄热门_小说后续在线阅读_无删减免费完结_
- 《主播她靠脸杀榜,大佬连夜冲千万》小说主角宋般般宋昭昭全文章节免费在线阅读
- 老公青梅让我儿子坐后备箱,儿子中暑昏迷后,我大杀四方傅明轩林清清辰辰小说精彩内容免费试读
- 喻清时莫子余张锐小说全文精彩章节在线阅读(我自毁前程后,对手却急了)
- 《傅亦恒孟歆歆温娆》小说章节列表免费试读_傅总,请收回你的爱小说阅读
- 室友抢我床位后,_我反欠她一辆车小说_赵小雨洛榛榛在线阅读
- 沈千鹤温如念苏浅浅命灯长明,爱却散尽小说全本在线阅读
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1