张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 » 《随便一记》 - 第233页
去除马赛克,有办法了 附运行教程
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 1 | 浏览 : 1252次

文章目录第一步:下载代码第二步:搭建环境第三步:运行模型消除马赛克秒变高清人像,将模糊的照片秒变清晰。ai技术是越来越强悍了。但现在的ai技术,真的可以完全消除马赛克,百分百还原照片吗?其实,消除马赛克的算法PULSE,在2年前就已经发布了。通过算法脑补出打码的地方,帮助我们还原照片。甚至脸上的毛孔、头发都能复原。发展到现在,消除马赛克的技术已经趋于成熟了,这不前两周,又开源了一个新的算法MAE。这个更厉害,即使画面遮挡超过90%,ai也会想办法帮我们复原。我运行试了一下,用的是下面这张图片。遮挡后,我们能大体看出这是什么,但是眼睛长什么样子还不知道。运行了一下,算法模拟出来的效果是下面这样的:而原图是这样的:基本上是还原了。我们来看看这些算法的
@Async失效情况
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 397次

1、注解@Async的方法不是public方法2、注解@Async的返回值只能为void或者Future3、注解@Async方法使用static修饰也会失效4、spring无法扫描到异步类,没加注解@Async 或@EnableAsync注解5、调用方与被调方不能在同一个类Spring在扫描bean的时候会扫描方法上是否包含@Async注解,动态地生成一个子类(即proxy代理类),当这个有注解的方法被调用的时候,实际上是由代理类来调用的,代理类在调用时增加异步作用。如果这个有注解的方法是被同一个类中的其他方法调用的,那么该方法的调用并没有通过代理类,而是直接通过原来的那个bean,所以就失效了。所以调用方与被调方不能在同一个类,主要是使用了动态代理,同一个类的时候直接
StrongSORT(deepsort强化版)浅实战+代码解析
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 710次

1.实战部分1.1具体操作其实和之前的deepsort没差到github上下载Yolov5_StrongSORT_OSNet下载对应的yolov5去替代原文件中yolov5下载yolov5权重(可以自动下载)和ReID权重(可能要科学上网)放到weight里面ReID权重有点神秘,给的是需要科学上网才能下载的,下载之后发现是pth,好像是会格式不对应默认的osnet_x0_25_msmt17.pt也给到你们:链接:https://pan.baidu.com/s/1RlB1oeiOQ7Le3XFd_QhmAg?pwd=nlsh提取码:nlsh或者是到csdn这里去下载把一些没法自动下载的疯狂报错2.代码详解在代码详解之前我认为了解整个代码的类和函数之间关系是非常
使用uniapp在打包微信小程序时主包和vendor.js过大(uniCloud的插件分包)
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 784次
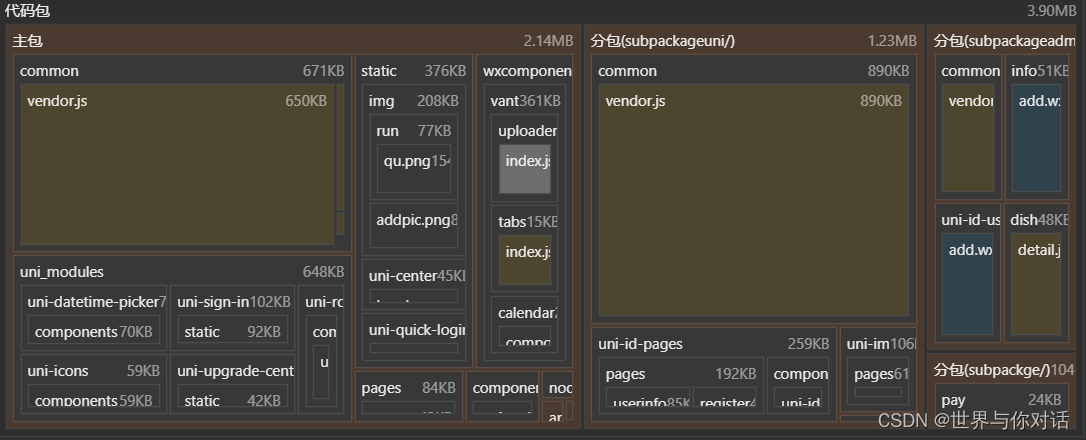
1.问题描述正常的的微信小程序在编译后,主包应保持在2MB左右(限制最大2MB),其余的文件通过分包来进行加载 但是有的情况下,微信小程序的主包能达到3MB,vendor.js会达到1.5MB 2.问题解决当你发现的你的微信vendor.js只有1个文件夹,且这个文件非常大时,首先需要检查manifest.json在这个文件夹下的源码视图中,在这个文件下的mp-weixin节点有个optimization optimization下的subPackages节点时用来控制微信分包的,需要将此节点设为true"optimization":{"subPackages":true}一般的微信小程序设置这个节点就能够解决但是如果你的微信小程序在uni_modle
MATLAB图像处理学习——图像增强技术(附图像增强方法代码)
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 387次
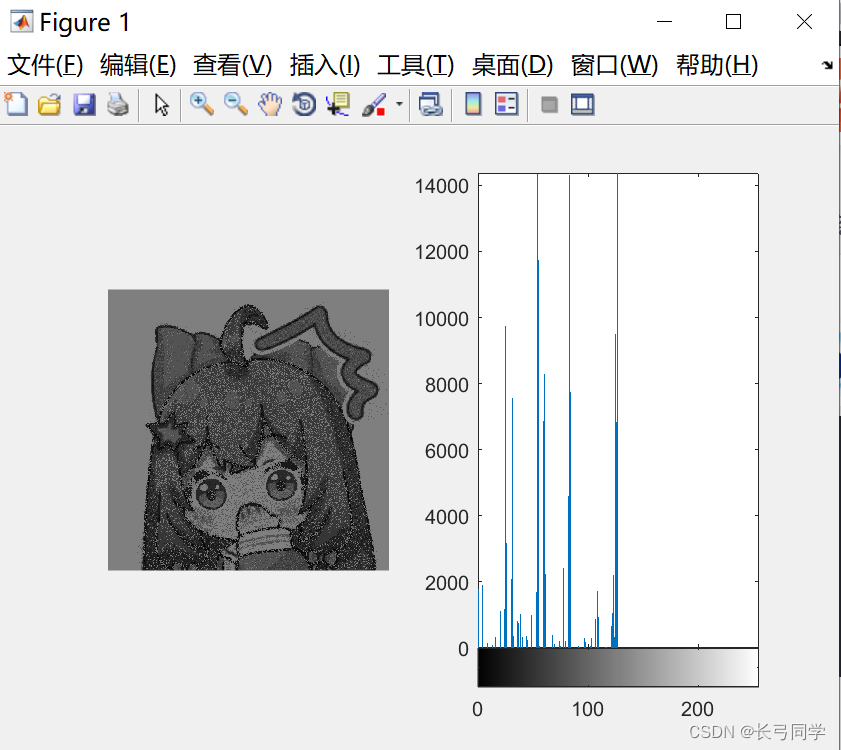
目录1.概论(1)图像增强技术简介(2)图像质量评估2.空间域内的图像增强 (1)显示灰度直方图 (2)图像灰度值调整 (3)图像亮度调节 (4)灰度图像的反转变换 3.直方图增强 (1)RGB彩色图像的颜色直方图 (2)直方图均衡化 (3)直方图规定化1.概论(1)图像增强技术简介 图像增强技术一般通过对图像的某些特征,例如边缘信息、轮廓信息和对比度等进行突出或增强,从而更好地显示图像的有用信息,提高图像的使用价值。 传统的图像增强技术大多是基在空间域中对图像进行处理。(空间域的图像增强技术主要有灰度变换和直方图方法等) 通过傅里叶变换可以将图像从空间域转换到频域,在频域进行滤波,然后在使用傅里叶反变换转换到空间域。(2)图像质量评
C/C++面试题分享
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 366次

目录1、C++面向对象的三大特性是什么?谈谈你对这三大特性的认识2、#include和#include“filename.h”有什么区别?3、C++程序内存的五大分区是哪五个?每个分区用来存放什么样的内容?4、指针与引用的区别?5、struct结构体和class类的区别是什么?6、C++中const的使用场景有哪些?7、inline内联函数与宏的异同点有哪些? 8、STL模板库的相关问题8.1、常用的STL容器有哪些?容器中有哪三个重要的概念?8.2、算法函数你知道吗?如何提高stl容器的遍历效率?8.3、哪两种容器中的数据是有序存放数据的?有什么好处?8.4、vector和数组有什么区别?8.5、vector和list有什么区别?9、了解C++11标准中的内
Learning C++ No.13【STL No.3】
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 463次

引言:北京时间:2023/3/7/15:33,还有27分钟就要去上课啦!刚刚把最近因为考试原因欠的课给还干净了,已经准备好今天晚上接受航哥的毒打了,毒打就毒打,咱不怕,只要不欠钱,咱就光明磊落;所以这篇博客今天肯定是发不了,不过明天肯定可以,哈哈!对,最重要的一点就是,我的新键盘到了,开心!不过没有按照预期码字到40w,不过也大差不差有37w了,上述的内容以及接下来的内容,我就将会使用我的新键盘,哈哈哈!所以今天我们的学习内容大致还是紧接着上篇有关C++的内容,继续深入学习vector,并且自我实现vector和解决vector中会引出的一些重要问题【如:迭代器失效】上篇博客,我们已经大致的了解了STL库中的vector类,和vector类的基本使用原理,所以此时我们就带着vector
Visual C++实现黑白棋游戏实战三:核心算法设计与实现(附源码和资源 可用于大作业)
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 357次
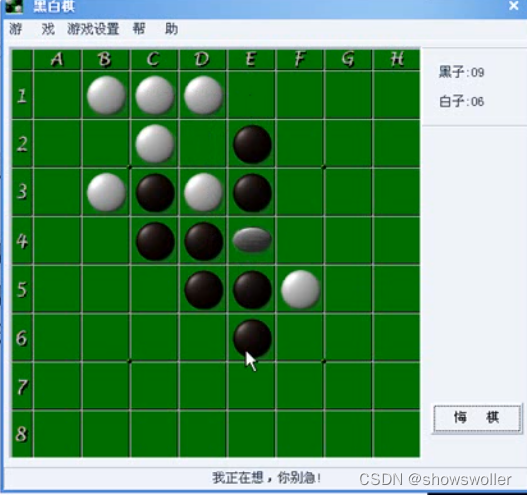
需要源码和资源请点赞关注收藏后评论区留言私信~~~在前面的博客中已经讲解了黑白棋游戏的菜单和各种对话框的实现,下面将对黑白棋游戏的核心算法的设计和实现进行讲解一、棋盘窗口类的设计黑白棋的棋盘窗口类,主要负责显示游戏中的棋盘,棋子和棋子个数,同时还要管理绘图,输入以及输出等内容,其主要有如下几个模块1:新游戏处理模块开始新游戏处理模块,主要是把棋盘数据进行初始化,并让棋盘窗口进行重绘2:鼠标输入处理模块利用截取窗口上鼠标输入的信息,得到当前玩家使用鼠标左键落子的坐标,将坐标进行重新转换得到棋盘数组中的序号,把当前棋子颜色保存到该数组中3:延时处理模块得到当前系统的时钟计时做一个消息循环,有API函数组成每循环以此,得到当前系统的时钟计时,并于延时相加得到超时时间
BEVFusion(北大&阿里)环境搭建教程
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 486次

BEVFusion环境搭建论文题目:BEVFusion:ASimpleandRobustLiDAR-CameraFusionFramework论文地址:https://arxiv.org/pdf/2205.13790.pdf代码地址:ADLab-AutoDrive/BEVFusion:OfficalPyTorchimplementationof“BEVFusion:ASimpleandRobustLiDAR-CameraFusionFramework”(github.com)前言:这是今年新发的一篇论文,我在第一次阅读时,代码还未开源,前几天发现开源了,而且这个框架做的很清晰,可以基于这个工作熟悉一下融合方案,也能稍稍改进一下。笔者环境:
置信椭圆(误差椭圆)详解
发布 : zsy861 | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 1142次
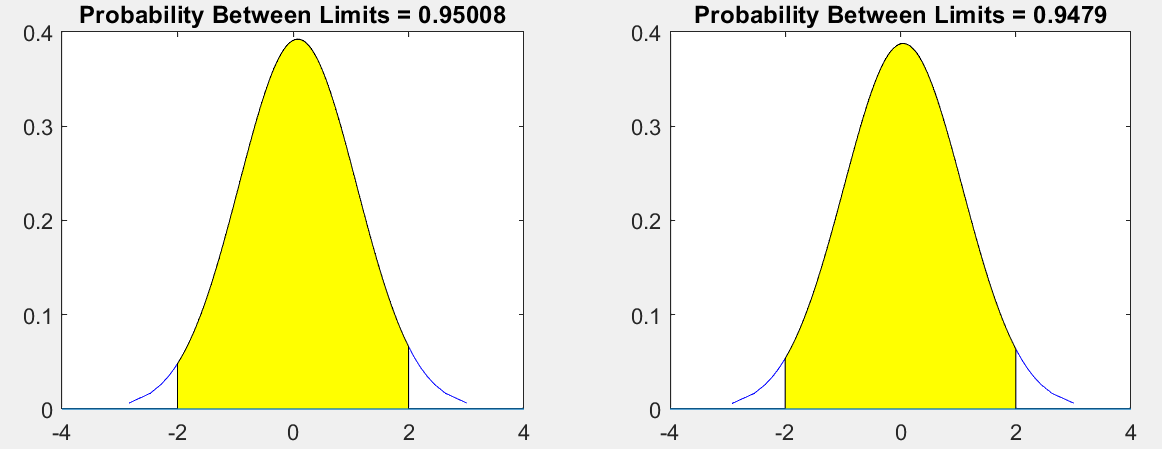
文章目录Part.I预备知识Chap.I一些概念Chap.II主成分分析Chap.IIIMatlab函数randnChap.IVMatlab函数pcaPart.II置信椭圆的含义Chap.I一个Matlab实例Sec.I两个不相关变量的特征Sec.II两个相关变量的特征Chap.II变换阵(解相关矩阵)的求解ReferencePart.I预备知识Chap.I一些概念首先要了解一下下面的概念:点估计:设总体X的分布函数的形式已知,但它的一个或多个参数未知,借助于总体X的一个样本来估计总体未知参数的值的问题称为参数的点估计问题。对于一个未知量,人们在测量或计算时,常不以得到近似值为满足,还需估计误差,即要求知道近似值的精确程度(亦
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1