张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 » 本文 - 第1页
01月13日
零基础学习Adaboost算法---原理+实例(对强分类器错误率为0有详细解释)_秃头小苏的博客
发布 : zsy861 | 分类 : 《关注互联网》 | 评论 : 0 | 浏览 : 464次

本文主要讲述了Adaboost算法,详细阐述了其原理,同时通过实例对算法进行解释,相信你通过读此文章,会对Adaboost有一定了解。本文主要参考了七月的一篇文章:https://blog.csdn.net/v_JULY_v/article/details/40718799这篇文章中强分类器错误率为0的解释不全,本文有对其详细的解释。当然非常推荐大家阅读七月的文章,因为他的文章都写的太好了。同样的,
01月01日
计算机网络五层协议,带你一起反内卷_Leps14的博客
发布 : zsy861 | 分类 : 《休闲阅读》 | 评论 : 0 | 浏览 : 522次
本文整理来自:https://juejin.cn/post/6844904029823172622如果对你有帮助点个赞吧!!!!
05月03日
基于无监督深度学习的单目视觉的深度和自身运动轨迹估计的深度神经模型_soaring_casia的专栏
发布 : zsy861 | 分类 : 《休闲阅读》 | 评论 : 0 | 浏览 : 601次
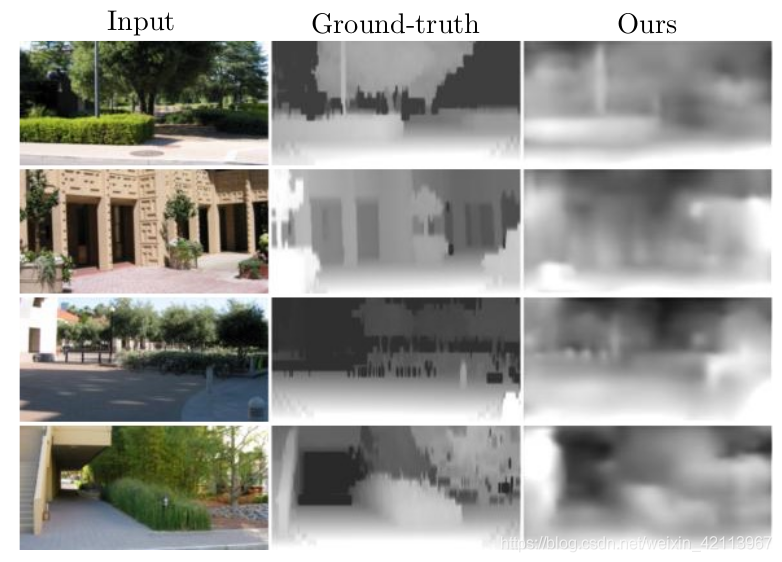
本文是对文章《UnsupervisedLearningofDepthandEgo-MotionfromVideo》的解读。Figure1.深度图和Ground-Truth[1]Figure2.AbsoluteTrajectoryError(ATE)onKITTIdataset[1]1.概述1.1为什么要讲这篇文章?在无人驾驶、3D重建和AR三个领域中,对于周围环境物体的深度(Depth)和对自身位置的估计(StateEstimation)一直是一个非常棘手而复杂的问题。过去常用的方法,传统的SLAM,通常用非常繁琐的数学公式
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1