实验目的
熟悉和掌握启发式搜索的定义、估价函数和算法过程
实验平台
Python 3.7 +
实验要求
熟练掌握A*算法的基本原理。分析不同启发式函数对问题求解的提升效果。
实现A*算法的求解,要求设计两种不同的估价函数:设置相同的初始状态和目标状态,针对不同估价函数,求得问题的届,比较它们对搜索算法性能的影响,包括扩展节点数、生成节点数、运行时间等。画出流程图。源程序代码实验结果(可以包含数据集分析、实验过程、结果截图、结果分析等)
八数码问题 不同的估价函数对搜索算法性能的影响(1)、曼哈顿距离:曼哈顿距离是八数码问题中常用的估价函数之一。在这个算法中,每个状态都会计算曼哈顿距离,并将距离加入优先队列中。曼哈顿距离具有良好的准确性和高效性,因此在这个算法中表现良好。
(2)、欧几里得距离:欧几里得距离是另一个常用的估价函数。在这个算法中,每个状态都会计算欧几里得距离,并将距离加入优先队列中。与曼哈顿距离相比,欧几里得距离可以更好地反映状态之间的真实距离,但是由于它需要进行平方根计算,因此计算成本更高。
(3)、切比雪夫距离:切比雪夫距离是一种更为简单的估价函数,它只需要取两个状态之间横向和纵向距离的最大值。在这个算法中,每个状态都会计算切比雪夫距离,并将距离加入优先队列中。与曼哈顿距离相比,切比雪夫距离更为简单,计算成本更低,但它可能不如曼哈顿距离那么准确。
流程图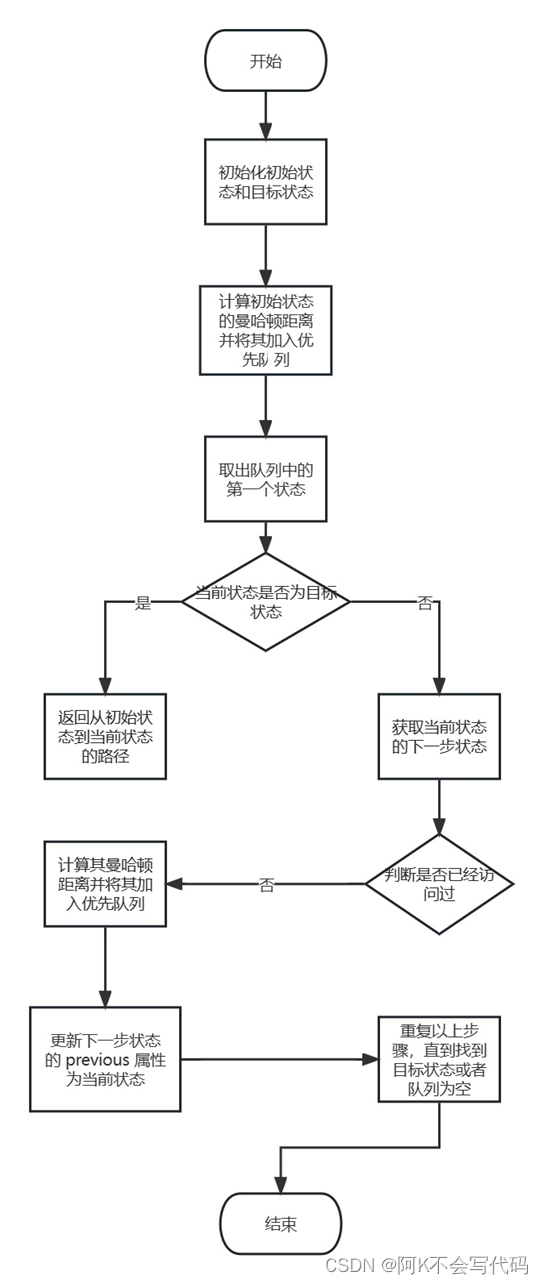
源程序代码
from queue import PriorityQueue# 定义状态类class State: def __init__(self, board, moves, previous): self.board = board self.moves = moves self.previous = previous # 定义状态比较函数,用于在优先队列中比较状态 def __lt__(self, other): return self.moves + self.manhattan_distance() < other.moves + other.manhattan_distance() # 计算曼哈顿距离 def manhattan_distance(self): distance = 0 for i in range(3): for j in range(3): if self.board[i][j] == 0: continue x, y = divmod(self.board[i][j] - 1, 3) distance += abs(x - i) + abs(y - j) return distance # 判断状态是否为目标状态 def is_goal(self): return self.board == [[1, 2, 3], [4, 5, 6], [7, 8, 0]] # 获取当前状态的下一步状态 def get_next_states(self): next_states = [] i, j = next((i, j) for i in range(3) for j in range(3) if self.board[i][j] == 0) for x, y in ((i+1, j), (i-1, j), (i, j+1), (i, j-1)): if 0 <= x < 3 and 0 <= y < 3: board = [row[:] for row in self.board] board[i][j], board[x][y] = board[x][y], board[i][j] next_states.append(State(board, self.moves+1, self)) return next_states # 获取从初始状态到达当前状态的路径 def get_path(self): path = [] state = self while state is not None: path.append(state) state = state.previous return reversed(path)# A*搜索算法def solve(start_board): start_state = State(start_board, 0, None) queue = PriorityQueue() queue.put(start_state) visited = set() while not queue.empty(): state = queue.get() if state.is_goal(): return state.get_path() if tuple(map(tuple, state.board)) in visited: continue visited.add(tuple(map(tuple, state.board))) for next_state in state.get_next_states(): queue.put(next_state) return None# 测试代码if __name__ == '__main__': start_board = [[1, 2, 3], [4, 5, 6], [0, 7, 8]] path = solve(start_board) if path is None: print("无解") else: for i, state in enumerate(path): print(f"步骤 {i}:") for row in state.board: print(row)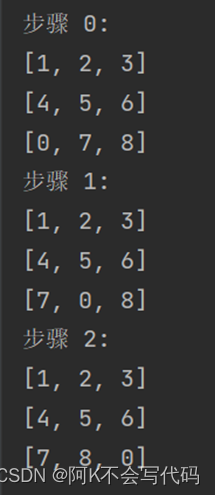
(1)、切比雪夫距离估价函数:对于55迷宫的起点和目标点,在网格上可视为同一正方形角落的两个点。因此,用切比雪夫距离可以轻松快速地计算出任意两点之间的代价。使用切比雪夫距离作为估价函数的A算法可以有效地搜索整个网格,直接到达目标点,并尽可能少地探索其他节点。因此,此估价函数能够有效地提高搜索算法性能。
(2)、曼哈顿距离估价函数:曼哈顿距离是指两点之间横向和纵向的距离之和。在5*5迷宫中,使用曼哈顿距离可以快速估算出两点之间的代价,但是这种估价方式会导致搜索算法探索更多的区域,因此相比于切比雪夫距离估价函数,曼哈顿距离估价函数在搜索算法性能方面稍逊一筹。
(3)、欧几里得距离估价函数:欧几里得距离是指两点之间的直线距离。在5*5迷宫中,使用欧几里得距离可以准确地估算出两点之间的代价,但是此估价方式需要更多的计算资源,因此可能会导致搜索算法性能下降。
综上所述,在5*5迷宫寻路问题中,估价函数的选择对搜索算法性能具有重要影响,切比雪夫距离估价函数可以在这个问题中提高搜索算法性能。
流程图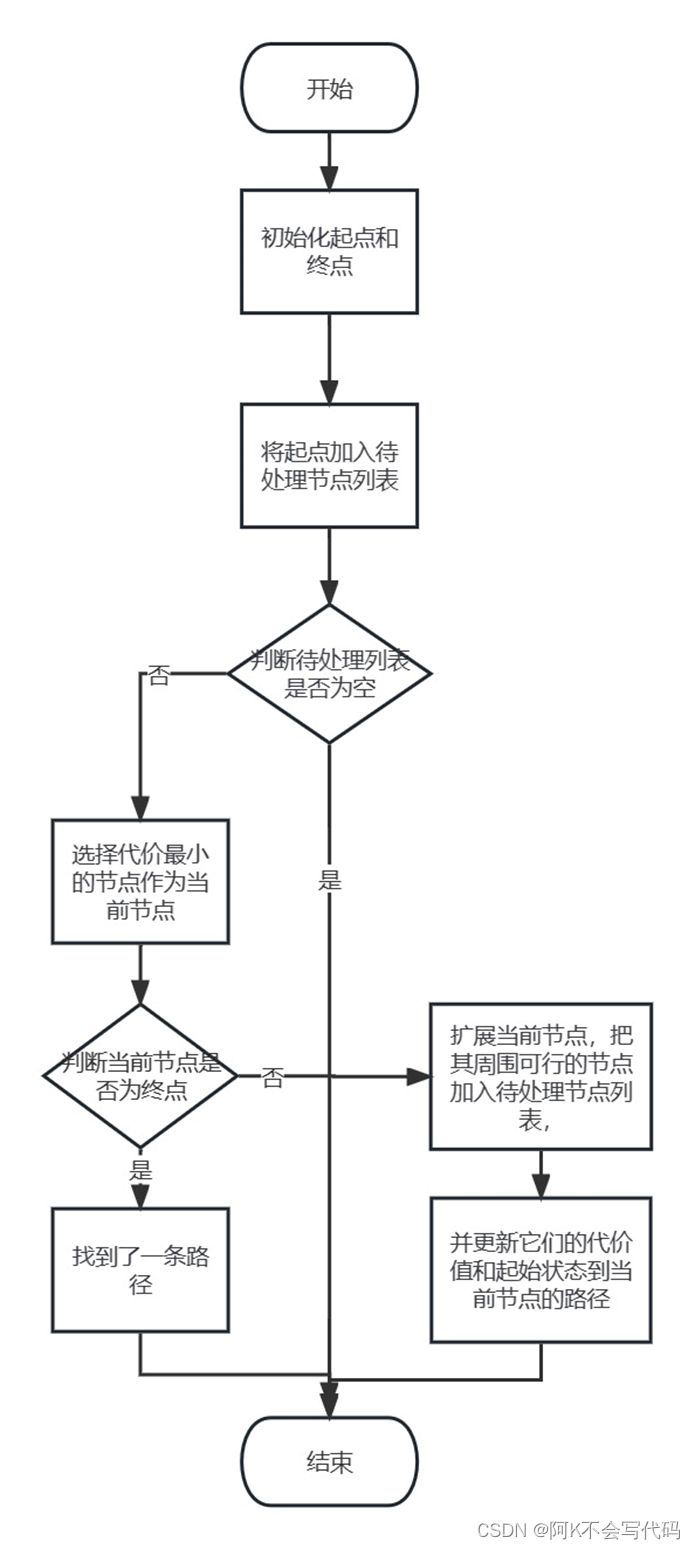
源程序代码
import numpy as npimport heapqclass Node: def __init__(self, x: int, y: int, parent=None): self.x = x self.y = y self.parent = parent self.g = 0 self.h = 0 def __lt__(self, other): return self.g + self.h < other.g + other.hdef heuristic(a: tuple, b: tuple) -> int: return abs(b[0] - a[0]) + abs(b[1] - a[1])def astar(maze: np.array, start: tuple, end: tuple) -> list: open_set = [] closed_set = set() start_node = Node(start[0], start[1]) end_node = Node(end[0], end[1]) heapq.heappush(open_set, start_node) while len(open_set) > 0: current_node = heapq.heappop(open_set) if current_node.x == end_node.x and current_node.y == end_node.y: path = [] while current_node is not None: path.append((current_node.x, current_node.y)) current_node = current_node.parent return path[::-1] closed_set.add((current_node.x, current_node.y)) for x, y in [(0, -1), (0, 1), (-1, 0), (1, 0)]: node = Node(current_node.x + x, current_node.y + y, current_node) if node.x < 0 or node.y < 0 or node.x >= maze.shape[0] or node.y >= maze.shape[1]: continue if maze[node.x][node.y] == 1: continue if (node.x, node.y) in closed_set: continue node.g = current_node.g + 1 node.h = heuristic((node.x, node.y), (end_node.x, end_node.y)) heapq.heappush(open_set, node) return Noneif __name__ == '__main__': start = (0, 0) end = (4, 4) maze = np.array([ [0, 0, 0, 0, 1], [1, 1, 1, 0, 1], [0, 0, 0, 0, 0], [1, 1, 1, 1, 0], [1, 1, 1, 1, 0] ]) path = astar(maze, start, end) print(path)
实验总结
通过这次实验,我掌握了如何使用A*搜索算法解决迷宫问题和八数码问题。这是一种常用的人工智能搜索算法,可以用于寻找路径和规划。
在实验中,首先学习了迷宫问题的定义和A算法的基本思路。我们使用Python编写代码,在55大小的迷宫中,通过A*算法计算出从起点到终点的最短路径。其中,需要考虑迷宫的障碍物、每个节点的代价值和启发式函数等因素,也需要用到优先队列来存储待扩展的节点。最后,通过绘制迷宫地图和标注路径,完成了实验任务。
接着,学习了八数码问题的定义和A算法的适用性。同样利用Python编写代码,通过A算法计算出从初始状态到目标状态的最短路径。在实验中,为了提高算法效率和减少搜索深度,设计了一种简单而可行的启发式函数,并使用优先队列存储待扩展的节点,最终完成了实验任务。
通过这次实验,除了掌握了A*搜索算法的应用,还进一步了解了Python的函数定义语法和相关知识,同时也加深了对算法原理和机制的理解。