环境:内存:16G
cpu:i9
平台:wsl2
系统:Ubuntu22.04
需提前准备好的环境:
香鱼 ros :Humble
python3.10(默认)
####carla 0.9.13 (自行安装)
#香鱼ros一键安装wget http://fishros.com/install -O fishros && bash fishros#安装一些依赖,在此之前python跟系统都要换源# Taken from https://docs.ros.org/en/humble/Installation/Ubuntu-Development-Setup.htmlsudo apt update && sudo apt install -y \ python3-flake8-docstrings \ python3-pip \ python3-pytest-cov \ ros-dev-toolssudo apt install -y \ python3-flake8-blind-except \ python3-flake8-builtins \ python3-flake8-class-newline \ python3-flake8-comprehensions \ python3-flake8-deprecated \ python3-flake8-import-order \ python3-flake8-quotes \ python3-pytest-repeat \ python3-pytest-rerunfailures# Initialize rosdepsudo rosdepc initrosdepc update安装
1、设置开发环境
git clone #ubuntu20用https://github.com/autowarefoundation/autoware.git -b galactichttps://github.com/autowarefoundation/autoware.gitcd autoware#####如果想实现autoware与carla仿真,请切换到下面版本,git checkout release/2023.10#自行安装缺少的依赖,这里因为用wsl2,显卡默认安装成功(需测试是否调用的独显):sudo apt-get update && sudo apt-get install mesa-utilsglxinfo -B #如果计算机上有多个 GPU,你也可以在 WSL 中访问它们。 但是,一次只能访问一个。 若要选择特定的 GPU,请将下面的环境变量设置为你的 GPU 在设备管理器中显示的名称:#export MESA_D3D12_DEFAULT_ADAPTER_NAME="NVIDIA"#这将执行字符串匹配,因此,如果你将其设置为“NVIDIA”,它将匹配以“NVIDIA”开头的第一个 GPU。#sudo prime-select NVIDIA #永久生效./setup-dev-env.sh#本人使用的zsh 完成后需要把一些配置从~/.bashrc复制到到~/.zshrc遇到的bug1
pip seemed to fail to build package: ansible==6.*Some possibly relevant errors from pip install: TimeoutError: The read operation timed out pip._vendor.urllib3.exceptions.ReadTimeoutError: HTTPSConnectionPool(host='files.pythonhosted.org', port=443): Read timed out.Error installing ansible from spec 'ansible==6.*'.解决方案
##更换pip源pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simplebug2
TASK [autoware.dev_env.ros2 : Authorize ROS GPG key] ***************************************************************************fatal: [localhost]: FAILED! => {"changed": false, "dest": "/usr/share/keyrings/ros-archive-keyring.gpg", "elapsed": 0, "msg": "Request failed: <urlopen error [SSL: CERTIFICATE_VERIFY_FAILED] certificate verify failed: unable to get local issuer certificate (_ssl.c:1007)>", "url": "https://raw.githubusercontent.com/ros/rosdistro/master/ros.key"}解决方案
#方案一sudo vim /etc/hosts#添加185.199.108.133 raw.githubusercontent.com#方案二#自动安装依赖时Authorize ROS GPG key验证失败的问题解决方案#找到并修改下面的文件:#//文件位置/autoware/ansible/roles/ros2/tasks/main.yaml #//第14行进行调整#url: https://raw.githubusercontent.com/ros/rosdistro/master/ros.key#//修改为如下地址url: https://gitee.com/hirowen/ros.key/raw/master/ros.keybug3
#卡在#TASK [autoware.dev_env.autoware_universe : Install egm2008-1]解决方案
#另起一终端执行sudo geographiclib-get-geoids egm2008-1注意事项
~/autoware/amd64.env目录下要选择适合自己的版本rosdistro=humblermw_implementation=rmw_cyclonedds_cppbase_image=ubuntu:22.04cuda_base_image=ubuntu:22.04prebuilt_base_image=ubuntu:22.04cuda_version=12.2cudnn_version=8.9.5.29-1+cuda12.2tensorrt_version=8.6.1.6-1+cuda12.02.源码安装
carla仿真(选)
在将代码库复制到本地之前,需要先修改 autoware.repos 文件,自动下载 openplanner 的代码库。在 autoware/autoware.repos 文件28-31 行中加入以下内容,我们需要下载humble用于ubuntu22系统
universe/external/open_planner: type: git url: https://github.com/ZATiTech/open_planner.git version: humble操作
cd autowaremkdir srcvcs import src < autoware.repossource /opt/ros/humble/setup.bash#香鱼用rosdepc#ubuntu20用香鱼ros源有一点问题#ubuntu20 要先执行#rosdep update --rosdistro=galacticrosdepc install -y --from-paths src --ignore-src --rosdistro $ROS_DISTRObug
ERROR: the following packages/stacks could not have their rosdep keys resolvedto system dependencies:pacmod_interface: Cannot locate rosdep definition for [pacmod3_msgs]carla_pointcloud: Cannot locate rosdep definition for [awf_velodyne_pointcloud]解决方式
#手动安装对应包sudo apt-get install ros-humble-pacmod3-msgs#[awf_velodyne_pointcloud]ros中没有对应安装包,多方查询后在autowarefoundation库中找到#awf_velodyne含有对应包,所以我们进行引入,在 autoware/autoware.repos 文件中open_planner后面加入以下内容 universe/external/awf_velodyne: type: git url: https://github.com/autowarefoundation/awf_velodyne.git version: awf/main#执行vcs import src < autoware.repos3.编译
#由于系统比较庞大,需多次执行,直到重复出现一个错误,再去排查colcon build --symlink-install --cmake-args -DCMAKE_BUILD_TYPE=Release4.运行
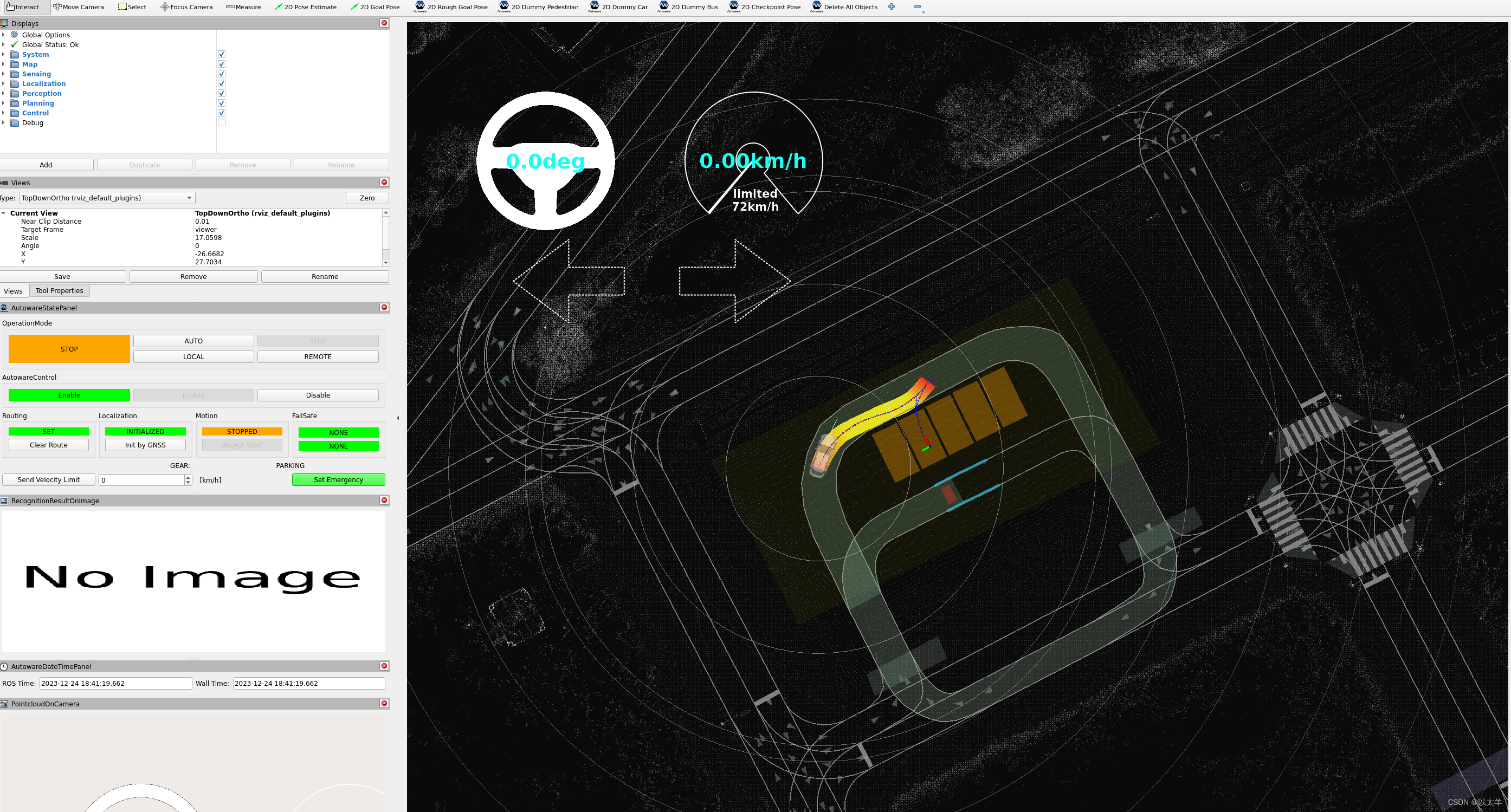
#这里事先下载好官方地图放在autoware下,需要可百度自行下载ros2 launch autoware_launch planning_simulator.launch.xml map_path:=$HOME/autoware/map_data/sample-map-planning vehicle_model:=sample_vehicle sensor_model:=sample_sensor_kitbug
[rviz2]: Stereo is NOT SUPPORTED#发生段错误 (核心已转储)解决方式
sudo apt-get install mesa-utils#执行查看版本glxinfo | grep "OpenGL version"#更新sudo add-apt-repository ppa:ubuntu-x-swat/updatessudo apt-get updatesudo apt-get dist-upgrade完成
在地图上选择初始位置与目标点出现路径过后rviz左侧会有auto按钮,点击执行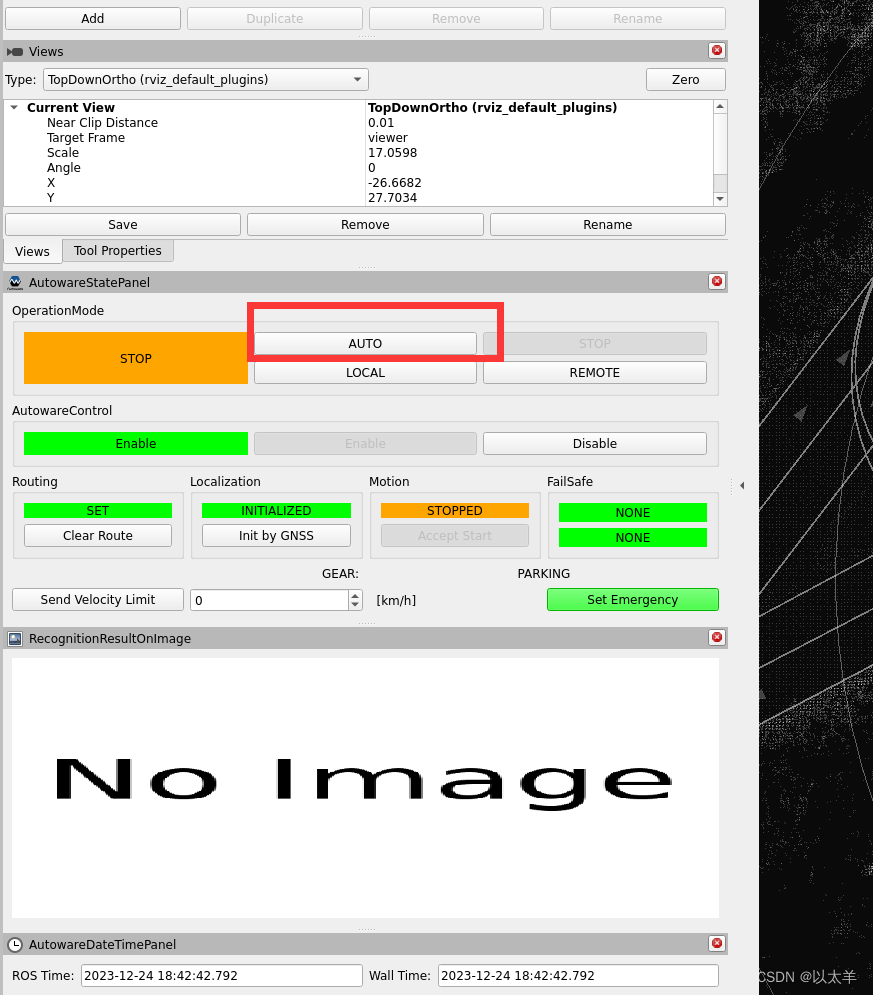
地图资源如果有需求,后续会考虑上传,因为一些原因wsl中并不能直接运行carla,与windows中的carla仿真内容有空会更新,记得点个赞!
更新:使用wsl2与ubuntu22实现最新版本autoware与最新版本carla连仿已经在第四章实现!!!!4.中文首发!!wsl2.0+Ubuntu22实现Autoware.universe与Carla 0.9.15仿真
sample官方地图1
官方地图2