流媒体学习之路(WebRTC)——Pacer与GCC(5)
——我正在的github给大家开发一个用于做实验的项目 —— github.com/qw225967/Bifrost目标:可以让大家熟悉各类Qos能力、带宽估计能力,提供每个环节关键参数调节接口并实现一个json全配置,提供全面的可视化算法观察能力。欢迎大家使用——
文章目录
流媒体学习之路(WebRTC)——Pacer与GCC(5)一、PacingController1.1 背景介绍1.2 代码 二、IntervalBudget2.1 背景2.2 代码 三、PacedSender四、总结
在讲具体内容之前插一句嘴,从GCC分析(3)开始,我们将针对GCC的实现细节去分析它设计的原理,让我们理解这些类存在的意义,不再带大家去串具体的流程了。
一、PacingController
1.1 背景介绍
Pacer(Packet Pacing)的作用是在传输数据时能平滑的发送出去,减少对网络冲击和抖动的产生,提高通信质量。在一次数据传输中,如果所有包几乎同时发送,网络就可能会遭遇到冲击,这就可能导致网络拥塞,数据包丢失等问题。为了避免这样的问题,需要通过一个定时器均匀分散发送数据包。
特别是在音视频传输中,PACER更是非常重要的一部分。因为音视频的传输对于网络的稳定性和实时性要求非常高,任何形式的网络抖动或者丢包都会造成音视频的卡顿,延迟等问题。所以在WebRTC中使用Pacer,就是为了使音视频传输更加平滑,减少由于网络抖动造成的影响,从而达到提高实时音视频通信质量的目的。
提到WebRTC的Pacer就需要讲述它码率控制的逻辑: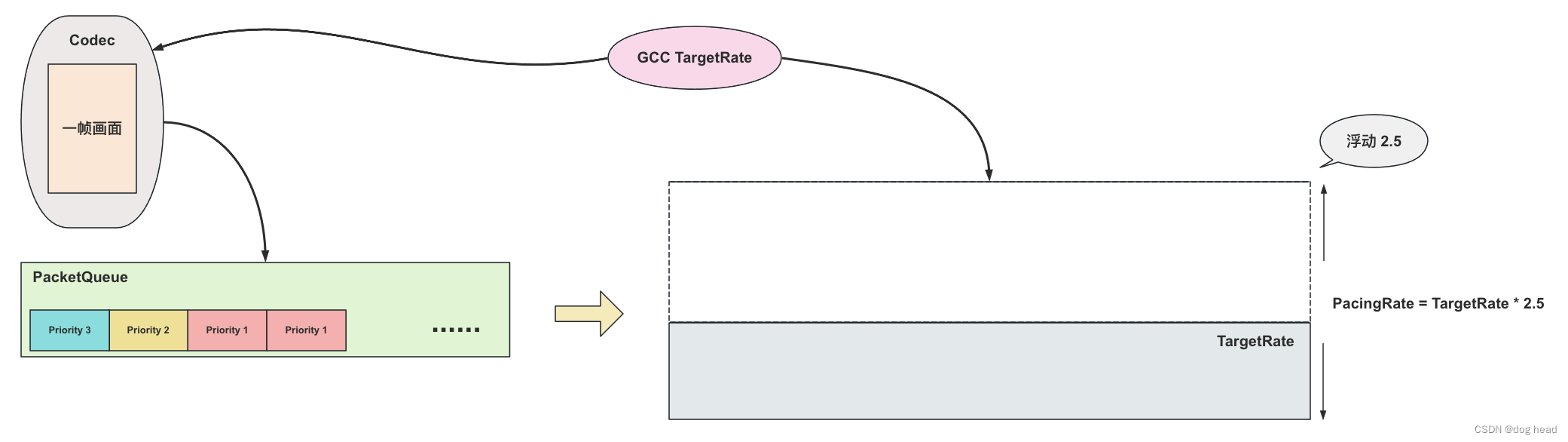
从GCC输出的码率会设置给编码器以及pacer。pacer并不是完全严格设置多少就发多少,而是留有2.5倍的空间去发送。真正控制发送码率的则是输出给编码器的部分,期望控制编码器的输出码率。同时,pacer还对所有数据设置了优先级,优先级如下:
int GetPriorityForType(RtpPacketToSend::Type type) { // Lower number takes priority over higher. switch (type) { case RtpPacketToSend::Type::kAudio: // Audio is always prioritized over other packet types. return kFirstPriority + 1; case RtpPacketToSend::Type::kRetransmission: // Send retransmissions before new media. return kFirstPriority + 2; case RtpPacketToSend::Type::kVideo: case RtpPacketToSend::Type::kForwardErrorCorrection: // Video has "normal" priority, in the old speak. // Send redundancy concurrently to video. If it is delayed it might have a // lower chance of being useful. return kFirstPriority + 3; case RtpPacketToSend::Type::kPadding: // Packets that are in themselves likely useless, only sent to keep the // BWE high. return kFirstPriority + 4; }}Pacer之所设计成这样,是因为我们向编码器设置码率之后想要保证丝滑清晰的画面,不可能完全控制输出码率,有时候画面复杂码率就大一些,画面简单码率就小一些。所以Pacer为了保证延迟预留了2.5倍的发送空间,也就是说真正控制码率的位置其实是编码器的输出。
1.2 代码
接下来我看看看pacer的核心代码——PacingController。这个类包含了优先级设置以及发送的逻辑,前面提到了优先级的内容下面只介绍发送逻辑:
void PacingController::ProcessPackets() { Timestamp now = CurrentTime(); // 当前时间 TimeDelta elapsed_time = UpdateTimeAndGetElapsed(now); // 与上次process的间隔 // 发送保活,每500ms发送一个padding包,一旦发送的数据大于拥塞窗口则不发送 if (ShouldSendKeepalive(now)) { DataSize keepalive_data_sent = DataSize::Zero(); // 产生padding包 std::vector<std::unique_ptr<RtpPacketToSend>> keepalive_packets = packet_sender_->GeneratePadding(DataSize::bytes(1)); for (auto& packet : keepalive_packets) { keepalive_data_sent += DataSize::bytes(packet->payload_size() + packet->padding_size()); packet_sender_->SendRtpPacket(std::move(packet), PacedPacketInfo()); } OnPaddingSent(keepalive_data_sent); } // 处于暂停直接返回 if (paused_) return; // 进入发送间隔开始计算 if (elapsed_time > TimeDelta::Zero()) { DataRate target_rate = pacing_bitrate_; DataSize queue_size_data = packet_queue_.Size(); // 队列中有数据才能发送 if (queue_size_data > DataSize::Zero()) { // Assuming equal size packets and input/output rate, the average packet // has avg_time_left_ms left to get queue_size_bytes out of the queue, if // time constraint shall be met. Determine bitrate needed for that. // packet_queue_.UpdateQueueTime(CurrentTime()); if (drain_large_queues_) { // 平均发送时间 = 最大队列时长(2s)- 平均排队时间 TimeDelta avg_time_left = std::max(TimeDelta::ms(1), queue_time_limit - packet_queue_.AverageQueueTime()); DataRate min_rate_needed = queue_size_data / avg_time_left; // 最发送码率大于目标码率,则目标码率等于最小需求码率 if (min_rate_needed > target_rate) { target_rate = min_rate_needed; RTC_LOG(LS_VERBOSE) << "bwe:large_pacing_queue pacing_rate_kbps=" << target_rate.kbps(); } } } // 设置媒体桶 media_budget_.set_target_rate_kbps(target_rate.kbps()); UpdateBudgetWithElapsedTime(elapsed_time); } bool first_packet_in_probe = false; bool is_probing = prober_.IsProbing(); PacedPacketInfo pacing_info; absl::optional<DataSize> recommended_probe_size; // 正在探测则获取探测数据信息 if (is_probing) { pacing_info = prober_.CurrentCluster(); first_packet_in_probe = pacing_info.probe_cluster_bytes_sent == 0; recommended_probe_size = DataSize::bytes(prober_.RecommendedMinProbeSize()); } DataSize data_sent = DataSize::Zero(); // The paused state is checked in the loop since it leaves the critical // section allowing the paused state to be changed from other code. // while (!paused_) { if (small_first_probe_packet_ && first_packet_in_probe) { // If first packet in probe, insert a small padding packet so we have a // more reliable start window for the rate estimation. // 产生padding包 auto padding = packet_sender_->GeneratePadding(DataSize::bytes(1)); // If no RTP modules sending media are registered, we may not get a // padding packet back. if (!padding.empty()) { // Insert with high priority so larger media packets don't preempt it. EnqueuePacketInternal(std::move(padding[0]), kFirstPriority); // We should never get more than one padding packets with a requested // size of 1 byte. RTC_DCHECK_EQ(padding.size(), 1u); } first_packet_in_probe = false; } // 获取待发送包 auto* packet = GetPendingPacket(pacing_info); // 一旦产生不了数据,证明队列为空,则放入padding数据 if (packet == nullptr) { // No packet available to send, check if we should send padding. DataSize padding_to_add = PaddingToAdd(recommended_probe_size, data_sent); if (padding_to_add > DataSize::Zero()) { std::vector<std::unique_ptr<RtpPacketToSend>> padding_packets = packet_sender_->GeneratePadding(padding_to_add); if (padding_packets.empty()) { // No padding packets were generated, quite send loop. break; } for (auto& packet : padding_packets) { EnqueuePacket(std::move(packet)); } // Continue loop to send the padding that was just added. continue; } // Can't fetch new packet and no padding to send, exit send loop. break; } // 发送数据 std::unique_ptr<RtpPacketToSend> rtp_packet = packet->ReleasePacket(); RTC_DCHECK(rtp_packet); packet_sender_->SendRtpPacket(std::move(rtp_packet), pacing_info); data_sent += packet->size(); // Send succeeded, remove it from the queue. OnPacketSent(packet); if (recommended_probe_size && data_sent > *recommended_probe_size) break; } if (is_probing) { probing_send_failure_ = data_sent == DataSize::Zero(); if (!probing_send_failure_) { prober_.ProbeSent(CurrentTime().ms(), data_sent.bytes()); } }}RoundRobinPacketQueue::QueuedPacket* PacingController::GetPendingPacket( const PacedPacketInfo& pacing_info) { if (packet_queue_.Empty()) { return nullptr; } // Since we need to release the lock in order to send, we first pop the // element from the priority queue but keep it in storage, so that we can // reinsert it if send fails. // 取出第一个包 RoundRobinPacketQueue::QueuedPacket* packet = packet_queue_.BeginPop(); bool audio_packet = packet->type() == RtpPacketToSend::Type::kAudio; bool apply_pacing = !audio_packet || pace_audio_; // 如果处于拥塞状态或者剩余数据为0则取消弹出 if (apply_pacing && (Congested() || (media_budget_.bytes_remaining() == 0 && pacing_info.probe_cluster_id == PacedPacketInfo::kNotAProbe))) { packet_queue_.CancelPop(); return nullptr; } return packet;}二、IntervalBudget
2.1 背景
PacingController上述用到了IntervalBudget这个类,这个类用于做数据统计和预估。并且它作为一个抽象预估类,并不会真正的存数据,只是做了数据统计,每次排出数据后都按时间更新一次桶的容量,发送时则会把已发送的数据更新到桶数据中。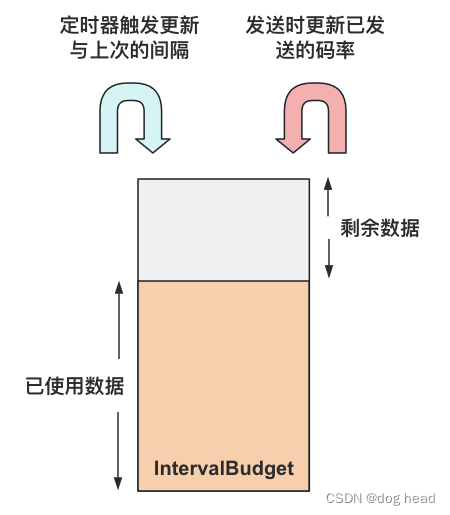
2.2 代码
头文件:
class IntervalBudget { public: explicit IntervalBudget(int initial_target_rate_kbps); IntervalBudget(int initial_target_rate_kbps, bool can_build_up_underuse); void set_target_rate_kbps(int target_rate_kbps); // TODO(tschumim): Unify IncreaseBudget and UseBudget to one function. void IncreaseBudget(int64_t delta_time_ms); void UseBudget(size_t bytes); size_t bytes_remaining() const; double budget_ratio() const; int target_rate_kbps() const; private: int target_rate_kbps_; int64_t max_bytes_in_budget_; int64_t bytes_remaining_; bool can_build_up_underuse_;};CPP文件:
constexpr int64_t kWindowMs = 500;}IntervalBudget::IntervalBudget(int initial_target_rate_kbps) : IntervalBudget(initial_target_rate_kbps, false) {}IntervalBudget::IntervalBudget(int initial_target_rate_kbps, bool can_build_up_underuse) : bytes_remaining_(0), can_build_up_underuse_(can_build_up_underuse) { set_target_rate_kbps(initial_target_rate_kbps);}void IntervalBudget::set_target_rate_kbps(int target_rate_kbps) { target_rate_kbps_ = target_rate_kbps; // 默认按500ms计算最大桶码率 max_bytes_in_budget_ = (kWindowMs * target_rate_kbps_) / 8; // 计算剩余码率 bytes_remaining_ = std::min(std::max(-max_bytes_in_budget_, bytes_remaining_), max_bytes_in_budget_);}void IntervalBudget::IncreaseBudget(int64_t delta_time_ms) { // 按时换算桶的码率 int64_t bytes = target_rate_kbps_ * delta_time_ms / 8; if (bytes_remaining_ < 0 || can_build_up_underuse_) { // We overused last interval, compensate this interval. // 把当前的码率加上 bytes_remaining_ = std::min(bytes_remaining_ + bytes, max_bytes_in_budget_); } else { // If we underused last interval we can't use it this interval. // 一旦剩余码率为负则重新使用新计算的码率 bytes_remaining_ = std::min(bytes, max_bytes_in_budget_); }}void IntervalBudget::UseBudget(size_t bytes) { // 把使用的数据进行统计 bytes_remaining_ = std::max(bytes_remaining_ - static_cast<int>(bytes), -max_bytes_in_budget_);}size_t IntervalBudget::bytes_remaining() const { return rtc::saturated_cast<size_t>(std::max<int64_t>(0, bytes_remaining_));}double IntervalBudget::budget_ratio() const { if (max_bytes_in_budget_ == 0) return 0.0; return static_cast<double>(bytes_remaining_) / max_bytes_in_budget_;}int IntervalBudget::target_rate_kbps() const { return target_rate_kbps_;}三、PacedSender
上述的PacingController把具体的发送数据进行具体的计算,WebRTC把发送的逻辑和控制逻辑抽离了出来,其实PacingSender在构造时创建了PacingController并传入了this指针。因此对于PacingController来说PacingSender作为控制器在内部进行了回调。
其他的函数我们不做具体的描述,只介绍定时函数:
int64_t PacedSender::TimeUntilNextProcess() { rtc::CritScope cs(&critsect_); // When paused we wake up every 500 ms to send a padding packet to ensure // we won't get stuck in the paused state due to no feedback being received. // 从controller中获取间隔 TimeDelta elapsed_time = pacing_controller_.TimeElapsedSinceLastProcess(); if (pacing_controller_.IsPaused()) { // 最大间隔为500ms return std::max(PacingController::kPausedProcessInterval - elapsed_time, TimeDelta::Zero()) .ms(); } auto next_probe = pacing_controller_.TimeUntilNextProbe(); if (next_probe) { return next_probe->ms(); } const TimeDelta min_packet_limit = TimeDelta::ms(5); return std::max(min_packet_limit - elapsed_time, TimeDelta::Zero()).ms();}四、总结
本文介绍了Pacer相关的内容,但我们的目的是通过Pacer去理解GCC的逻辑,在经过多个版本的迭代,Pacer与GCC的配合已经非常娴熟,同时耦合也是非常严重的:
每次Pacer的溢出发送,都需要GCC兜底(GCC的灵敏可以有效地检测到网络的排队,任何一个溢出的数据都能快速的下调码率,在遇到瓶颈带宽的时候出现了明显的锯齿状发送曲线);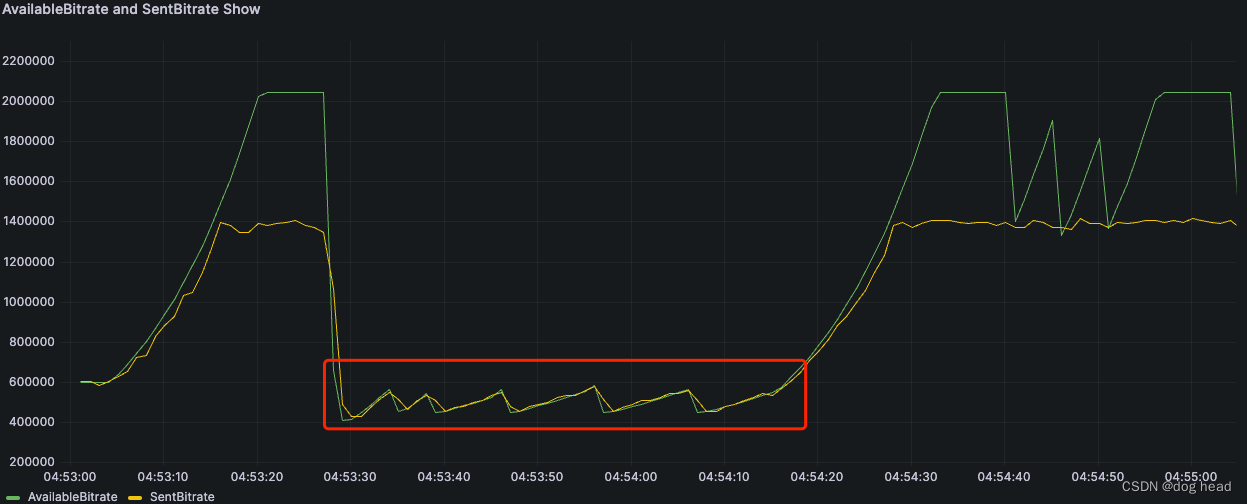
码率不足与拥塞探测的矛盾(编码器的输出往往会收到一定的限制不可能无线地上涨,在当今环境下很难探测到带宽瓶颈。Pacer的做法是提供Padding的数据作为补充探测,但大部分厂商为了避免流量过度消耗,就把探测的逻辑关闭了。在这方面来看,Pacer真是没有完全听GCC的话);
也正是因为这样,WebRTC的Pacer是GCC的Pacer其他的拥塞算法来了,估计都水土不服,参考BBR被移除可知。