前言
yolov7,yoloX相关论文还没细看,yolov8就出来了。太卷了!
YOLOv8 是 ultralytics 公司在 2023 年 1月 10 号开源的 YOLOv5 的下一个重大更新版本。
GitHub地址 : github.com/ultralytics/ultralytics
YOLOv8是在YOLOv5上的一次更新,故本篇文章主要对比两者区别:
目录
前言YOLOv5架构:架构特点:1.Backbone2.PAN/FPN3.Head4.正负样本分配策略5.Loss 其他补充:Yolov5中SPP和SPPF的区别。 YOLOv8架构:架构特点:1.Backbone2.PAN-FPN3.Head4.正负样本分配策略5. Loss 两者推理过程区别coupled head 和 decoupled head 有什么差异?
YOLOv5架构:
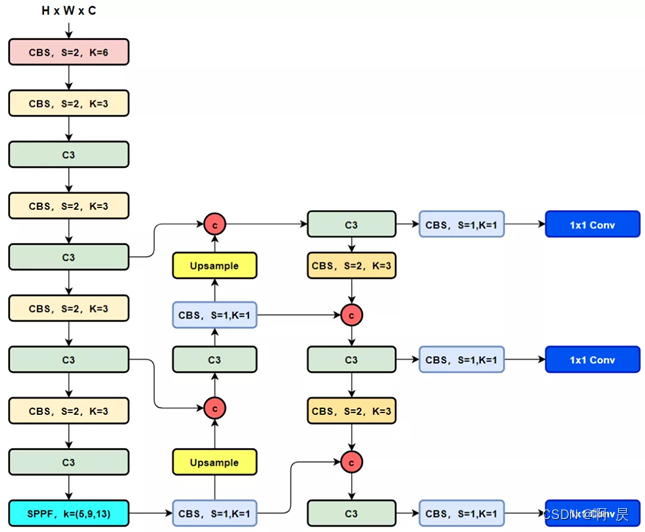
架构特点:
1.Backbone
CSP的思想(/梯度分流)的主要思想, 其中多为CBS和C3模块。
2.PAN/FPN
双流的FPN,其中多为CBS和C3模块。
3.Head
coupled head + Anchor-base(coupled head这一词是在YoloX提出decoupled head 与之对应,后续会讲解coupled head 和decoupled head的区别)。
4.正负样本分配策略
静态分配策略。
5.Loss
分类用BCE Loss,回归用CIOU Loss。还有一个存在物体的置信度损失(BCE Loss)。
其他补充:Yolov5中SPP和SPPF的区别。
作用/功能: 经过1×1,5×5,9×9,13×13的池化生成的特征图都是13×13的,保持原大小不变。这里作用是融合局部和整体特征。
区别: SPPF可以减少计算量,原来要3个MaxPool2d,现在只要1个MaxPool2d,有点像快速幂求解的算法思路。
详细看:https://zhuanlan.zhihu.com/p/584153158
YOLOv8架构:
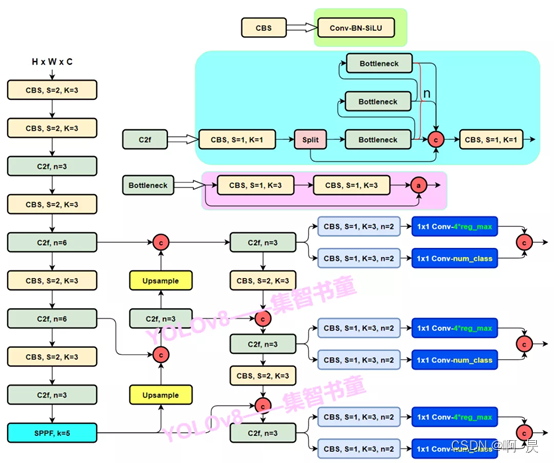
架构特点:
1.Backbone
相同:CSP的思想(/梯度分流);并且使用SPPF模块。
不同:将C3模块替换为C2f模块。
2.PAN-FPN
双流的FPN,(其中多为CBS和C3模块)。
相同:PAN的思想。
不同:删除了YOLOv5中PAN-FPN上采样的CBS 1*1,将C3模块替换为C2f模块。
3.Head
Decoupled head + Anchor-free
4.正负样本分配策略
采用了TAL(Task Alignment Learning)动态匹配。
5. Loss
相同:分类损失依然采用 BCE Loss
不同:(1).舍去物体的置信度损失;(2).回归分支loss: CIOU loss+ DFL
DFL的描述详见: https://zhuanlan.zhihu.com/p/147691786
两者推理过程区别
YOLOv8 的推理过程和 YOLOv5 几乎一样,唯一差别在于前面需要对 Distribution Focal Loss 中的积分表示 bbox 形式进行解码,变成常规的 4 维度 bbox,后续计算过程就和 YOLOv5 一样了。
coupled head 和 decoupled head 有什么差异?
参考:
https://www.cnblogs.com/chentiao/p/16420907.html
区别: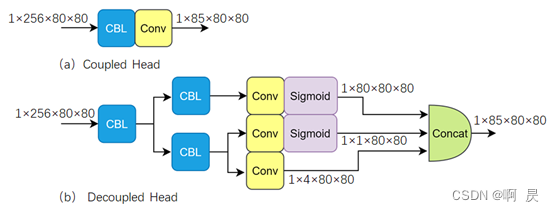
当使用coupled head时,网络直接输出shape (1,85,80,80);
如果使用 decoupled head,网络会分成回归分支和分类分支,最后再汇总在一起,得到shape同样为 (1,85,80,80)。
为什么用decoupled head?
如果使用coupled head,输出channel将分类任务和回归任务放在一起,这2个任务存在冲突性。(论文中说有冲突性,但是没有理解为什么存在冲突,我考虑的是从损失函数角度存在冲突)
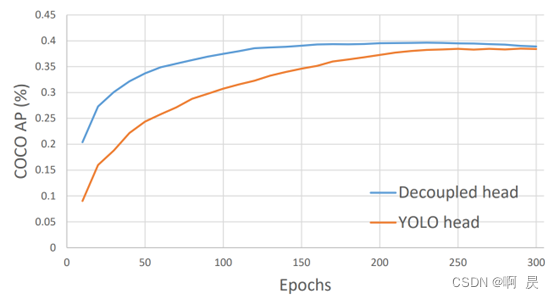
通过实验发现替换为Decoupled Head后,不仅是模型精度上会提高,同时 网络的收敛速度也加快了,使用Decoupled Head的表达能力更好。
Couple Head和 Decoupled Head 的对比曲线如下: