目录
一.在pycharm打开克隆后的yolov5-5.0的项目二.配置pycharm的解释器1.依次打开: 文件->设置->项目->python解释器2.打开配置好的deeplearn学习环境1.单击添加解释器->单击添加本地解释器2.单击【现有】3.单击【...】4.依次选择 自己安装anaconda 的位置->envs->deeplearn(deeplearn是配置conda环境时,自己创建的深度学习的环境)->python.exe, 点击确定即可!5.依次保存退出即可! 三.安装运行yolov5所需的包!1.一般打开这个文件,此时都会出现这个提示,提示你需要安装相应的包,点击【安装要求】,然后耐心等待即可。2.如果不出来黄色提示的话,打开pycharm的终端,输入pip install -r requirements.txt,然后回车即可!2.接下来提供一种新的安装方法。1.对pycharm软件源进行换源,打开【python软件包】2.点击设置图标3.点击【+】4.复制下述地址地址粘贴即可(选其一or都粘贴都行)!5.打开终端输入下述代码,这个是直接指定了镜像源,-i ...,前面换源操作有安装失败的可以直接在软件包下载即可!6.耐心等待安装即可!7.软件包进行安装:提示有未安装的包,如下。8.打开文件->设置->项目->python解释器,点击【+】,如下图,切记不要选择conda的包管理器,就是+号旁边的绿色按钮。9.搜索包名,选择国内源安装即可。10.安装成功即可,如下图所示,其它包同理即可! 四.解决一些运行yolov5出现的一些问题1.打开weights文件夹下的 detect.py,右键点击运行。2.出现问题【subprocess.CalledProcessError: Command 'pip install 'protobuf<3.20,>=3.9.2'' returned non-zero exit status 1.】** 解决办法 ** 3.出现问题【AttributeError: Can't get attribute 'SPPF' on <module 'models.common' from 'D:\\Users\\xxxxx\\Desktop\\yolov5-5.0_配置\\models\\common.py'>】** 解决办法 ** 4.出现问题【AttributeError: 'Upsample' object has no attribute 'recompute_scale_factor'】** 解决方法 ** 5.出现问题【RuntimeError: The size of tensor a (80) must match the size of tensor b (56) at non-singleton dimension 3】** 解决方法 ** 6.出现问题【NotImplementedError: Could not run 'torchvision::nms' with arguments from the 'CUDA' backend. 】** 问题截图 **** 解决方法 ** 五.运行detect.py,发现运行成功想必做深度学习的同学,电脑都是装了anaconda和pycharm的,本文是在该基础上进行的。
首先你得在yolov5的官网上克隆相关的项目。
可能部分没有魔法的同学进不去或者很慢,我就把他放在自己的网盘里面了。
网盘链接:https://pan.baidu.com/s/1jM5u2ymsTcw6gUJpXGVpzg?pwd=5gn2
提取码:5gn2
ps:我写这篇文章也挺耗时的,希望各位兄弟姐妹们,不要吝啬您的关注,谢谢。
一.在pycharm打开克隆后的yolov5-5.0的项目
ps:直接打开解压后的文件夹拖拽到pycharm即可!
ps:看不懂的可以把pycharm进行汉化,不丢人的,比如我 ?
结果如下图所示: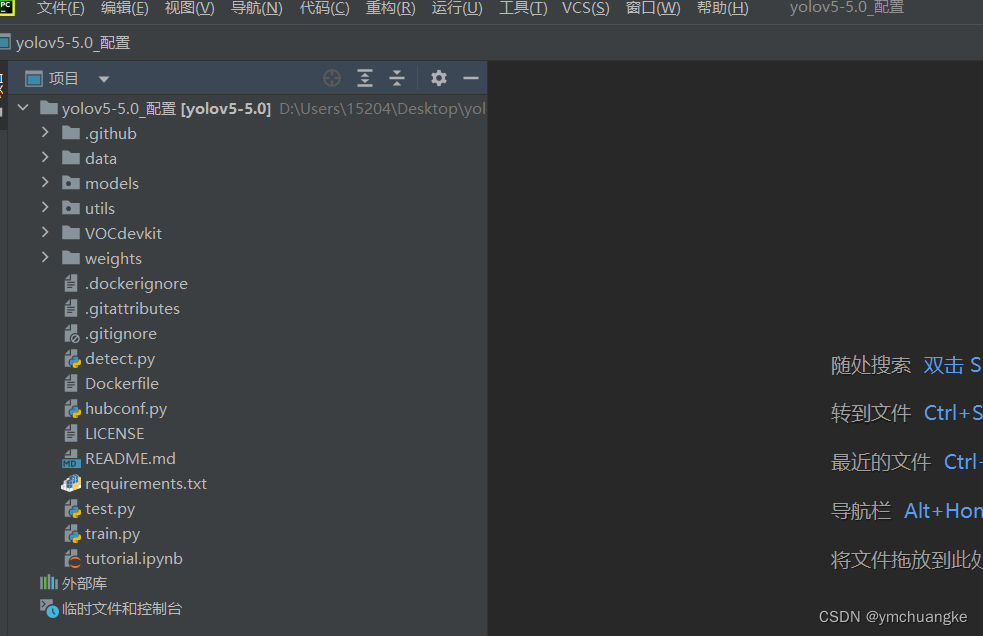
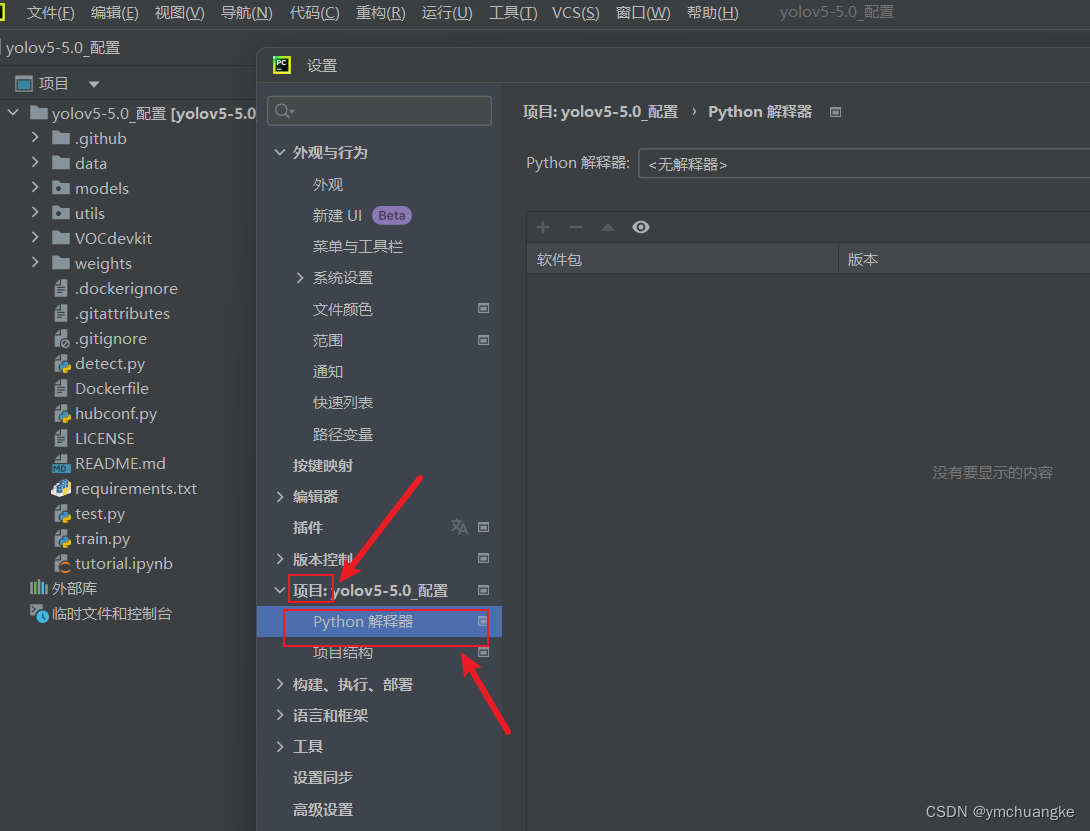
二.配置pycharm的解释器
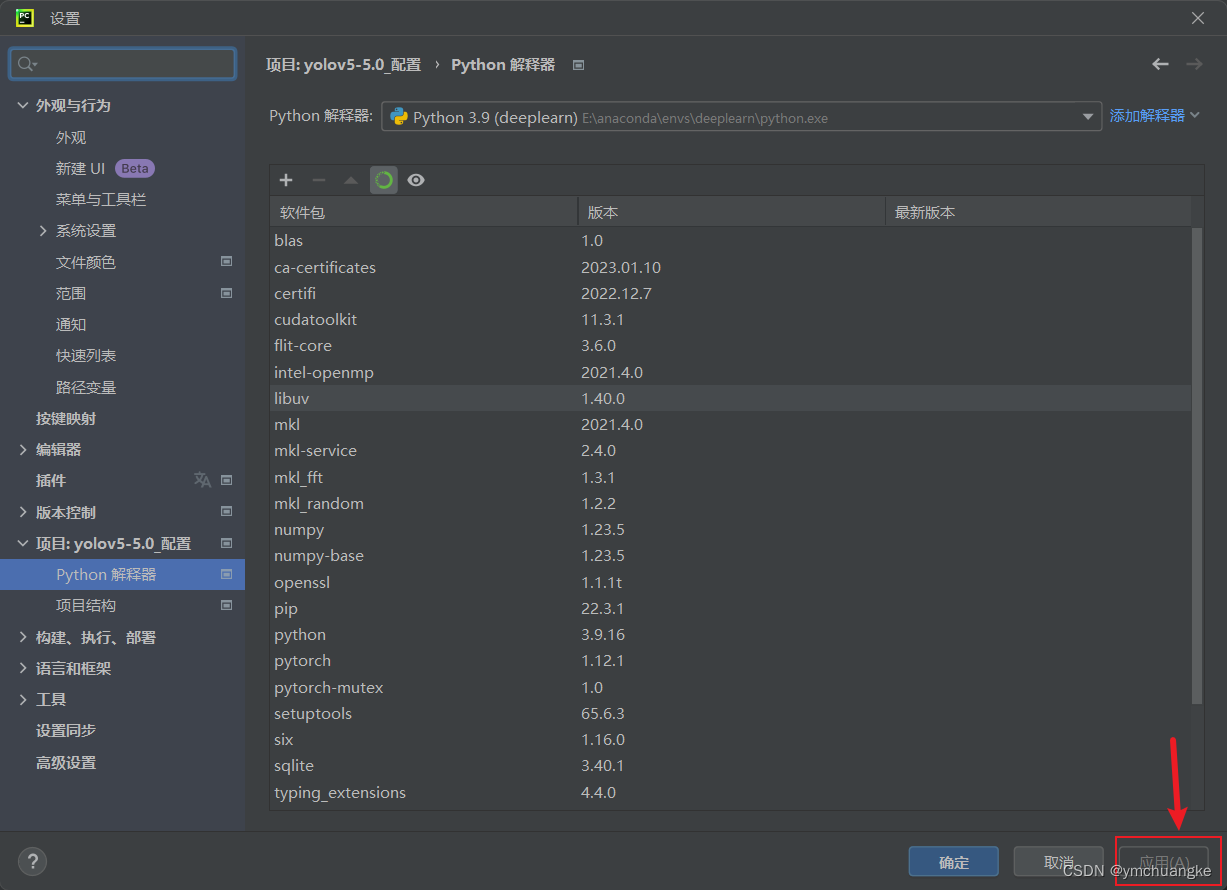
1.依次打开: 文件->设置->项目->python解释器
结果如下图所示
这我用的是上一篇文章中配置好的conda环境,不会配置的我把链接放在下面
配置conda环境的链接:https://blog.csdn.net
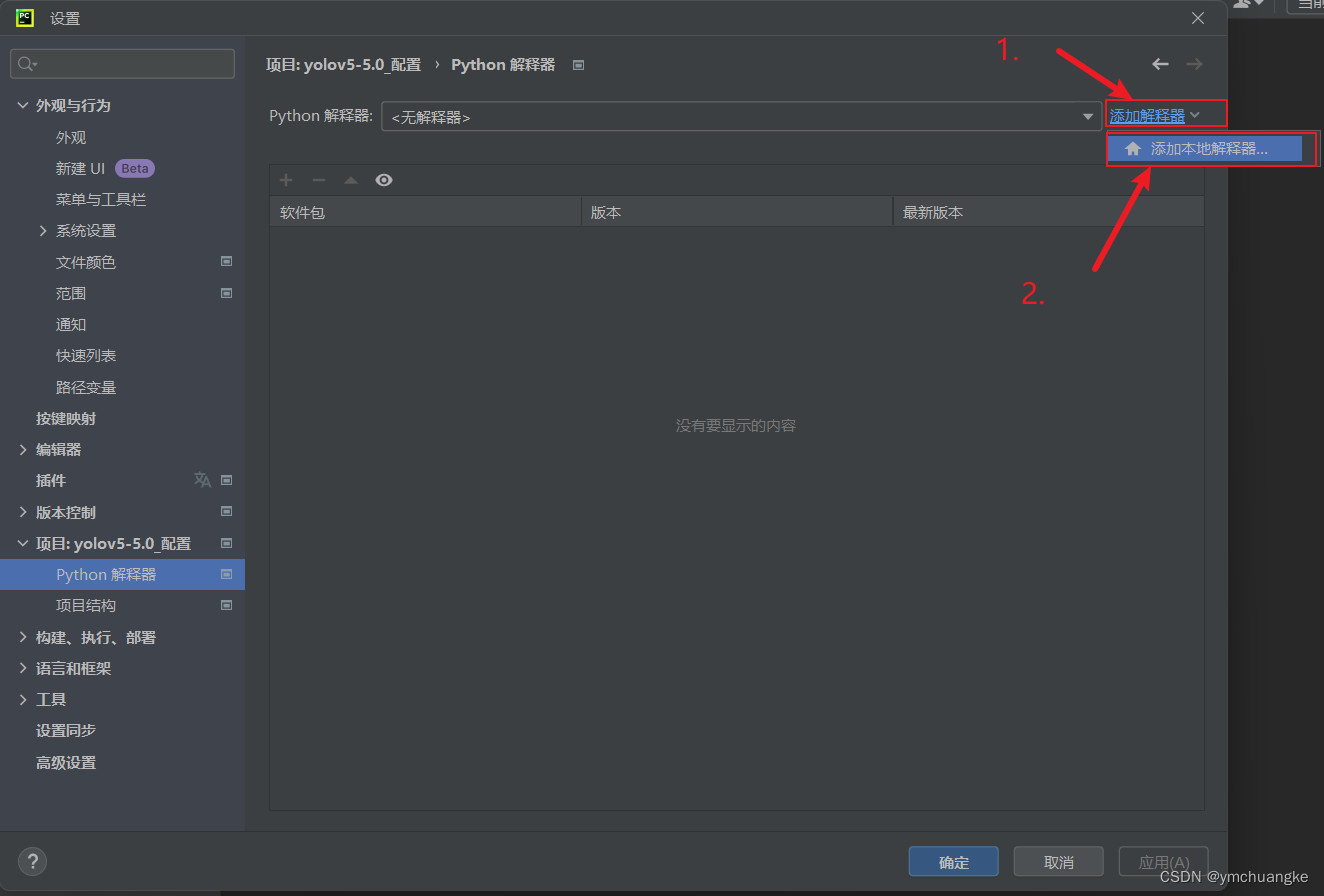
2.打开配置好的deeplearn学习环境
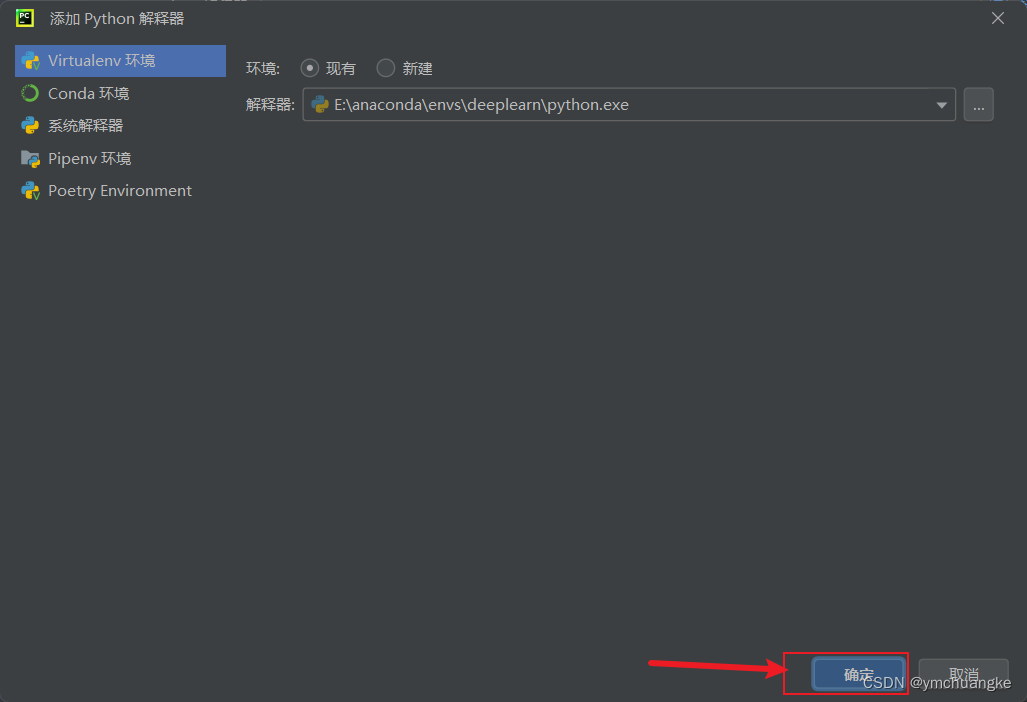
1.单击添加解释器->单击添加本地解释器
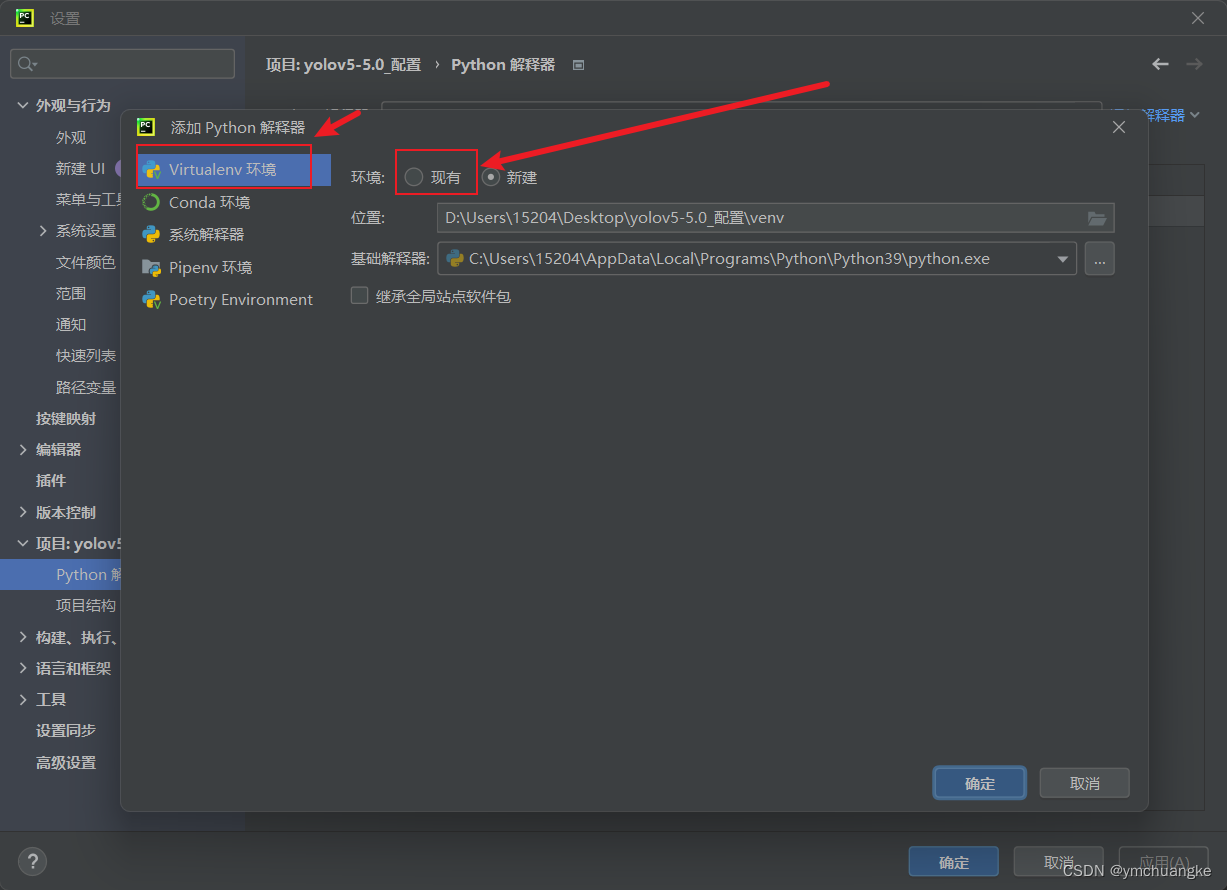
2.单击【现有】
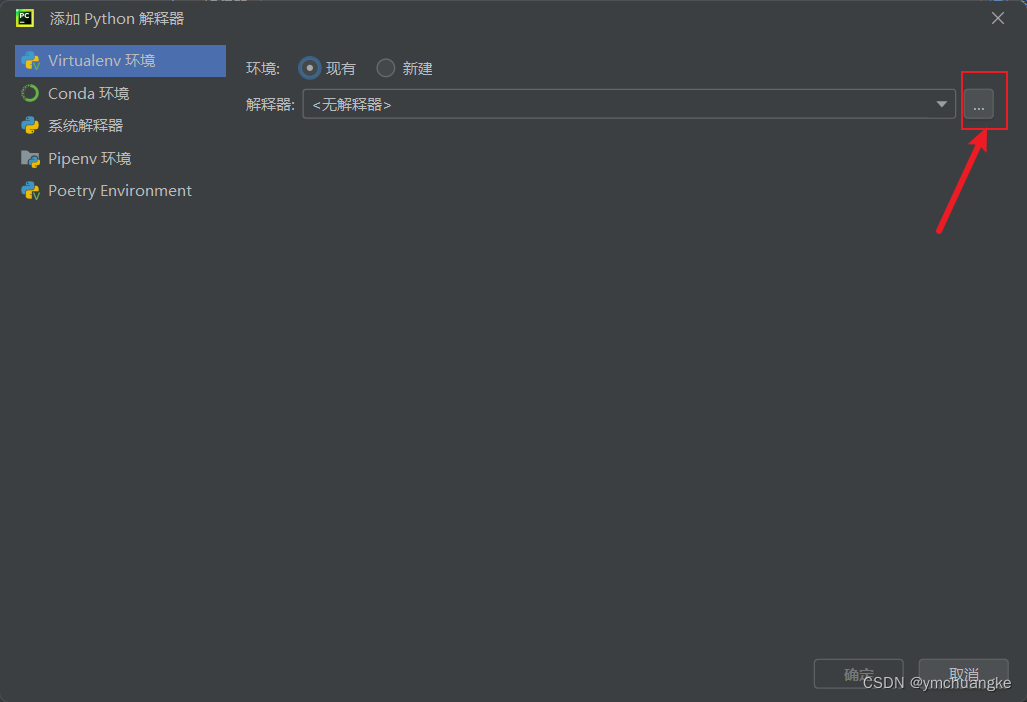
3.单击【…】
4.依次选择 自己安装anaconda 的位置->envs->deeplearn(deeplearn是配置conda环境时,自己创建的深度学习的环境)->python.exe, 点击确定即可!
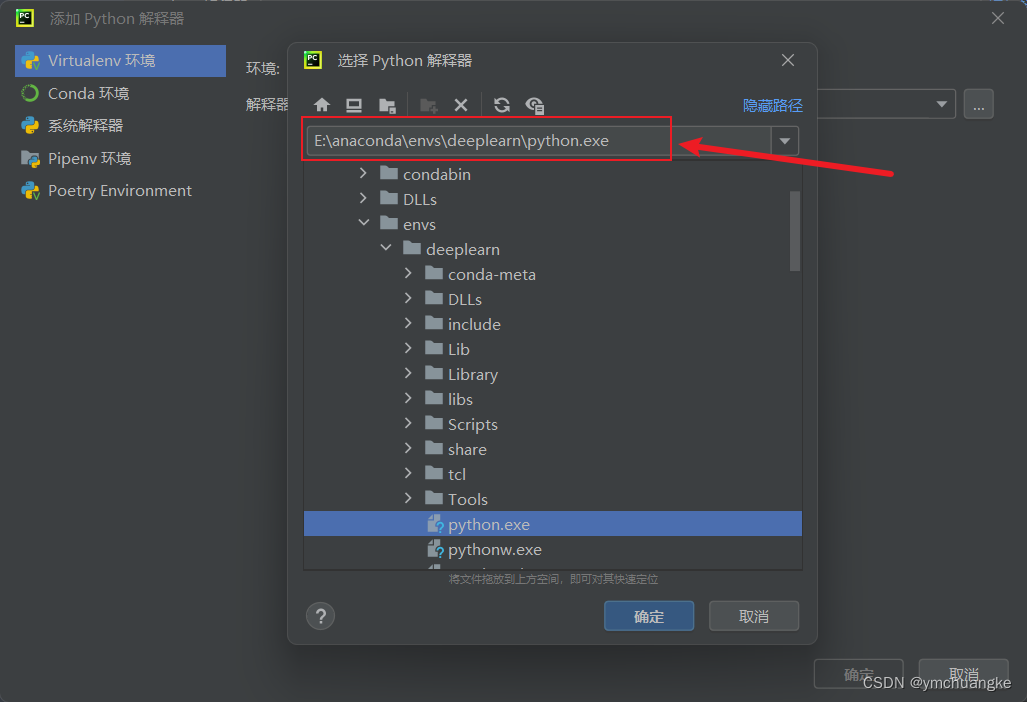
5.依次保存退出即可!
三.安装运行yolov5所需的包!
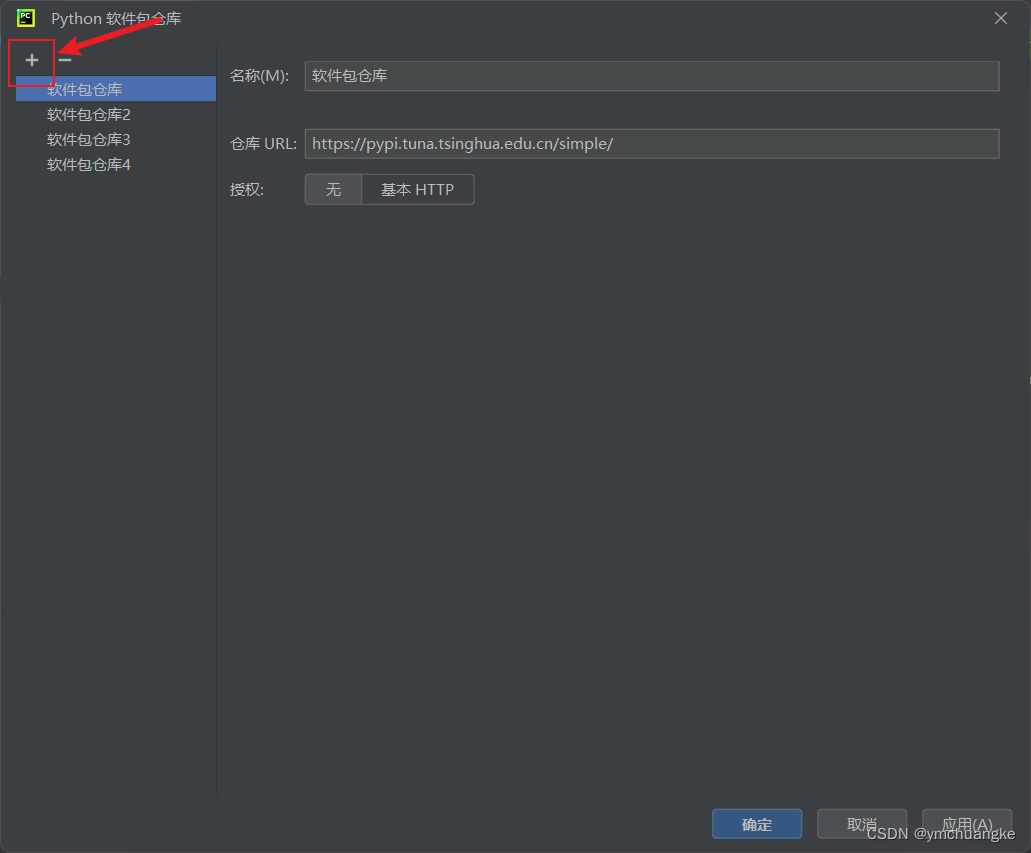
1.一般打开这个文件,此时都会出现这个提示,提示你需要安装相应的包,点击【安装要求】,然后耐心等待即可。

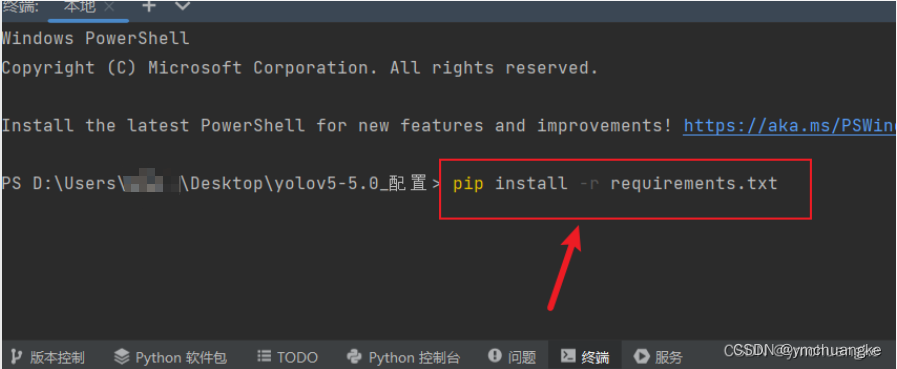
2.如果不出来黄色提示的话,打开pycharm的终端,输入pip install -r requirements.txt,然后回车即可!
ps:一般的话,都不会一次安装成功,出来依次提示,点击一次,多点几次【安装要求】就好了!
ps:这个方法一般比较慢,耗时可能有点长,多点几次,耐心等待即可!
pip install -r requirements.txt
2.接下来提供一种新的安装方法。
下图便是安装所需的包,大家首先对pycharm进行换源操作。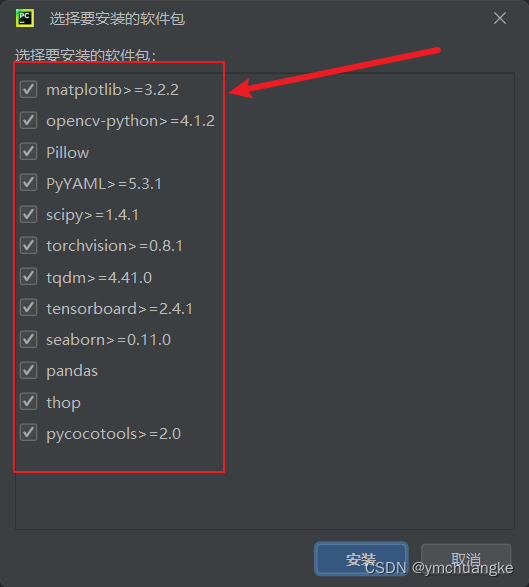
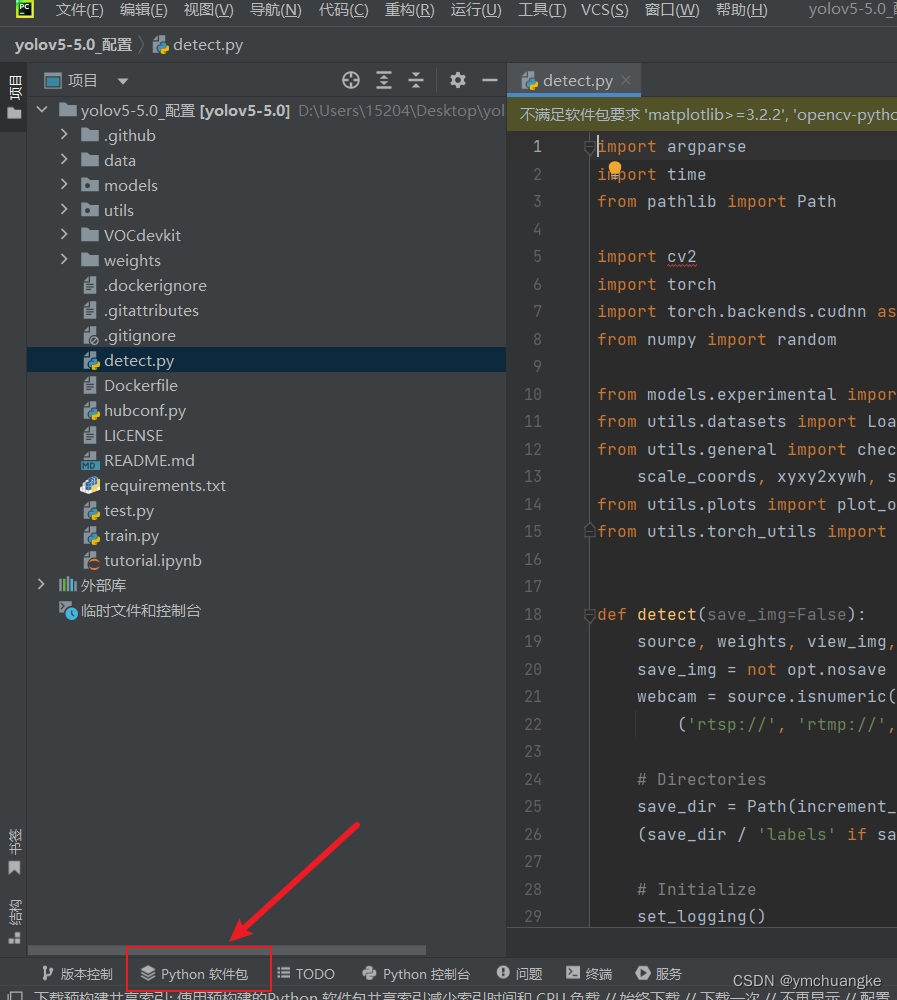
1.对pycharm软件源进行换源,打开【python软件包】
2.点击设置图标
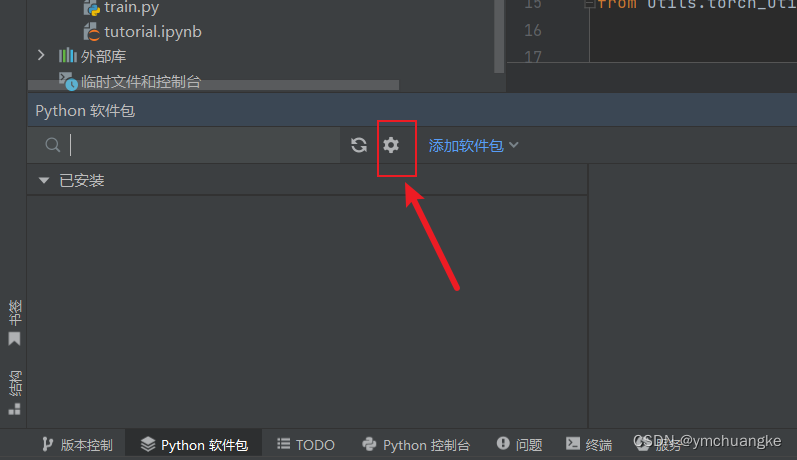
3.点击【+】
4.复制下述地址地址粘贴即可(选其一or都粘贴都行)!
https://pypi.tuna.tsinghua.edu.cn/simple #清华 http://pypi.douban.com/simple/ #豆瓣 http://mirrors.aliyun.com/pypi/simple/ # 阿里云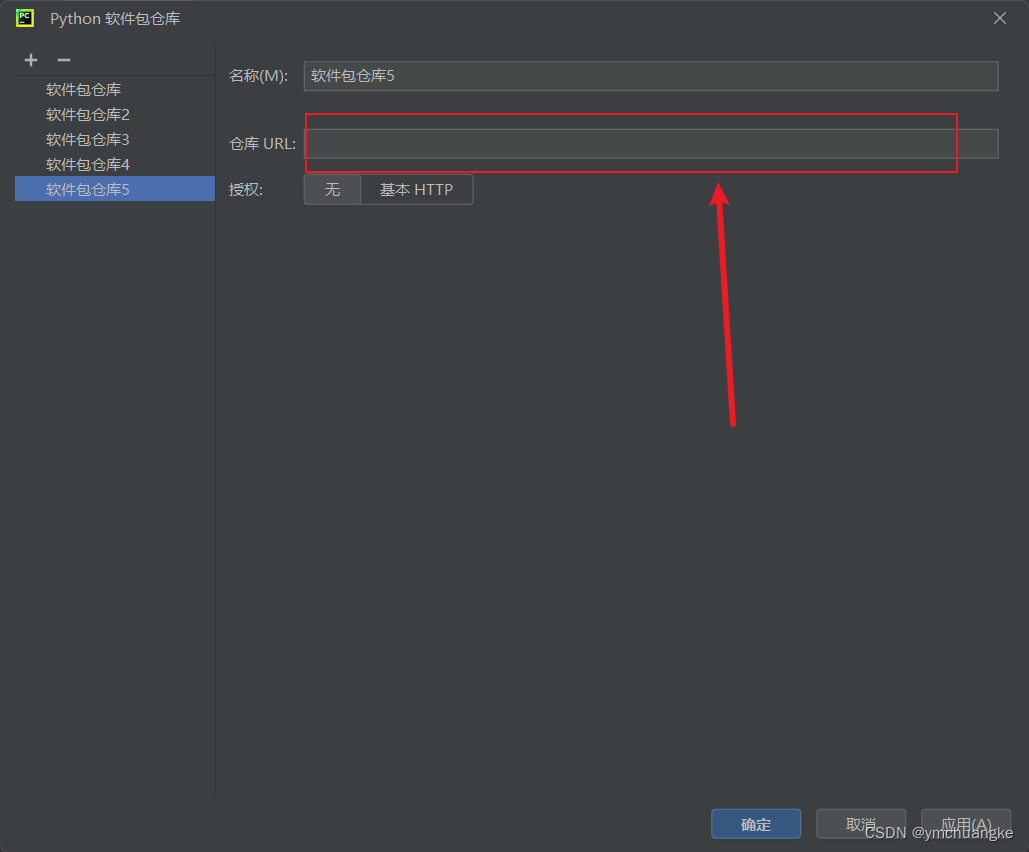
ps:以后安装什么包,直接选择国内的源进行安装可以提高速度!
5.打开终端输入下述代码,这个是直接指定了镜像源,-i …,前面换源操作有安装失败的可以直接在软件包下载即可!
pip install -r requirements.txt -i https://pypi.tuna.tsinghua.edu.cn/simple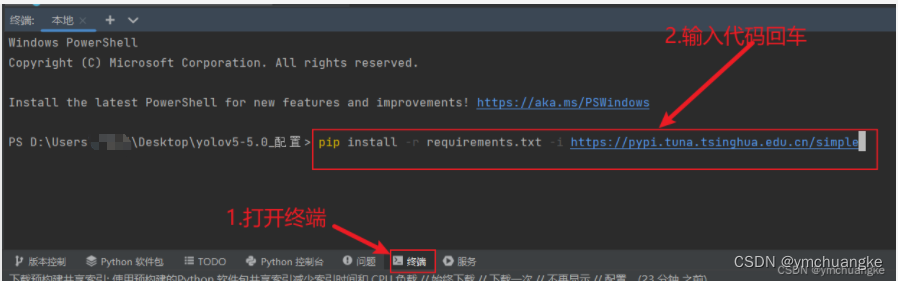
6.耐心等待安装即可!
ps:如果有未安装成功的,可以多试几遍,或者直接在python软件包里面搜索进行安装。
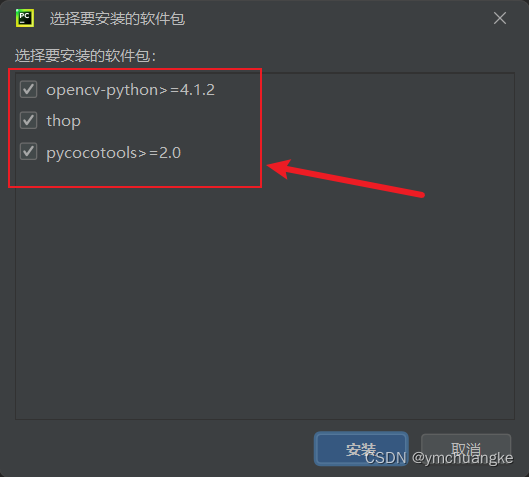
7.软件包进行安装:提示有未安装的包,如下。
8.打开文件->设置->项目->python解释器,点击【+】,如下图,切记不要选择conda的包管理器,就是+号旁边的绿色按钮。
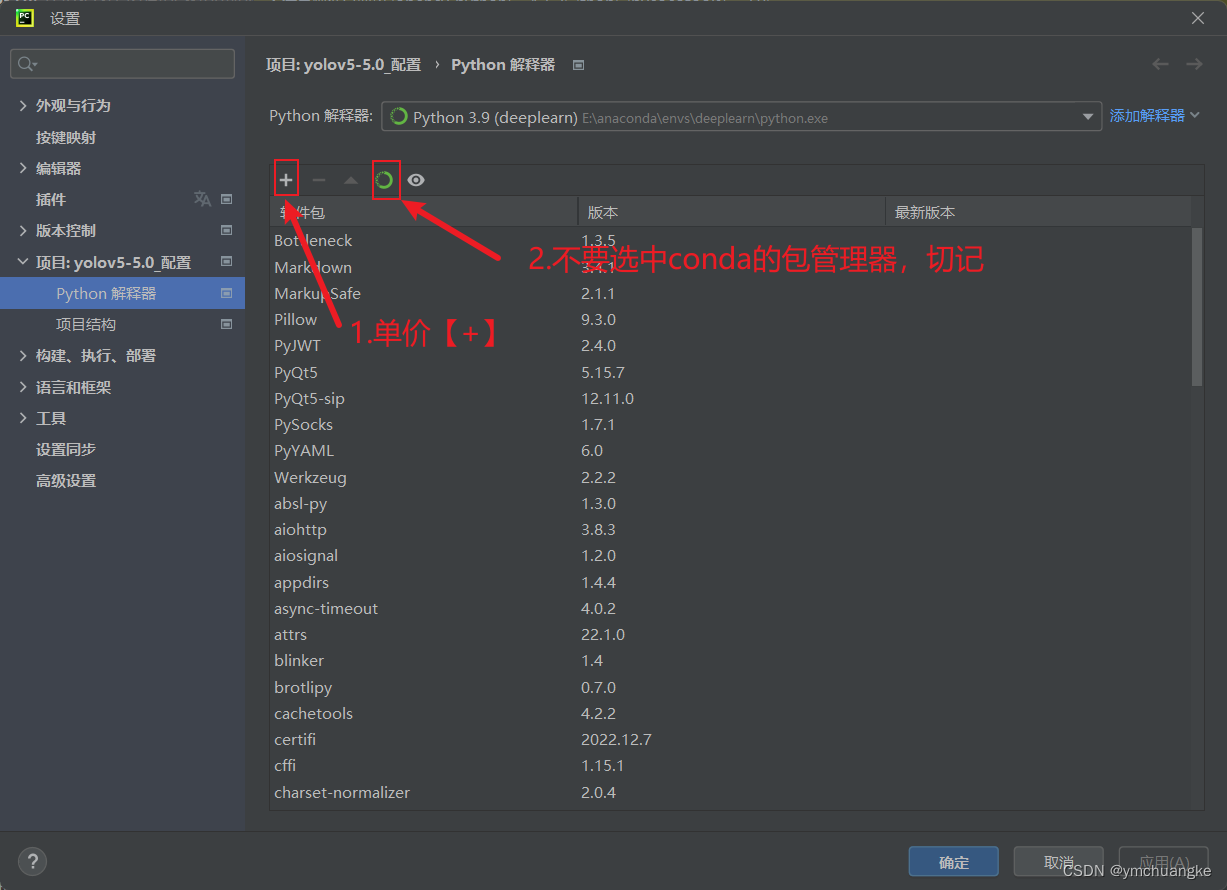
9.搜索包名,选择国内源安装即可。
ps:不出现国内源,点击刷新等待即可!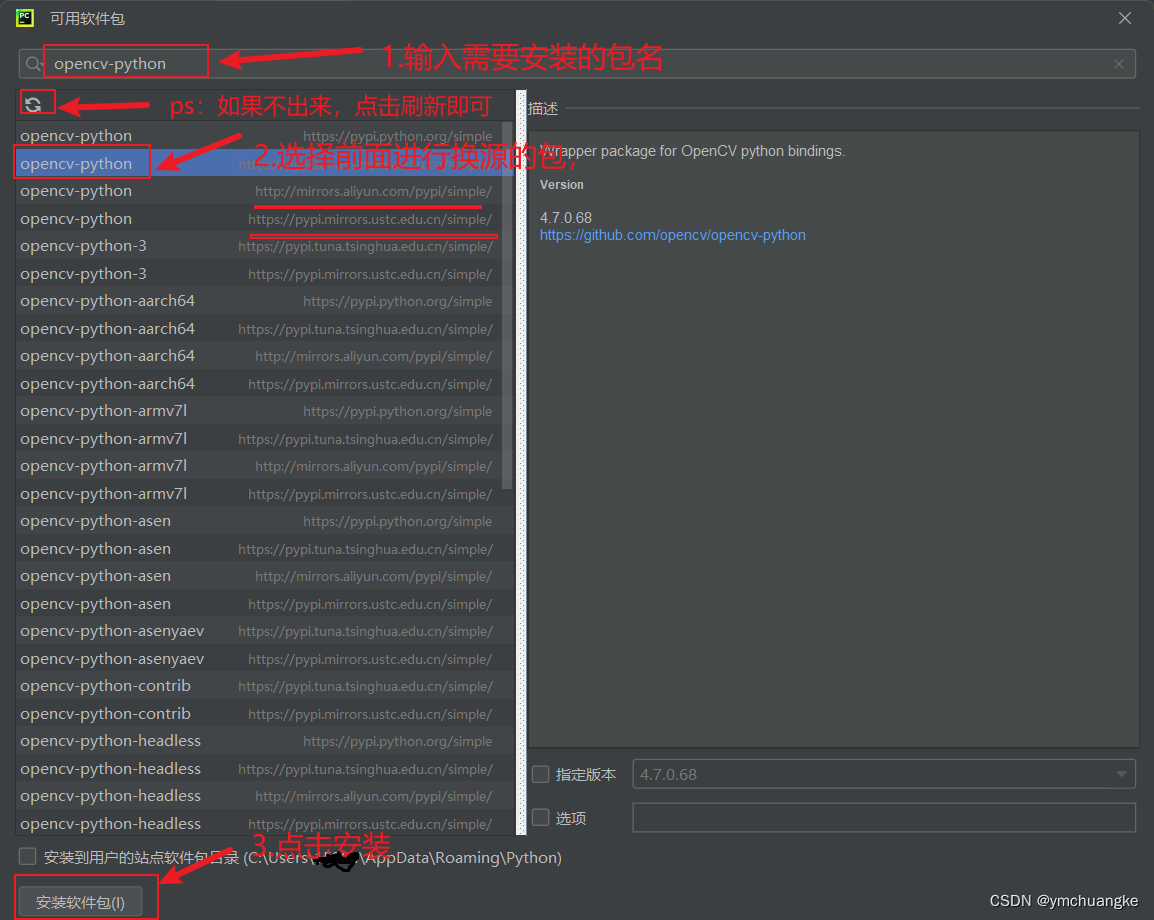
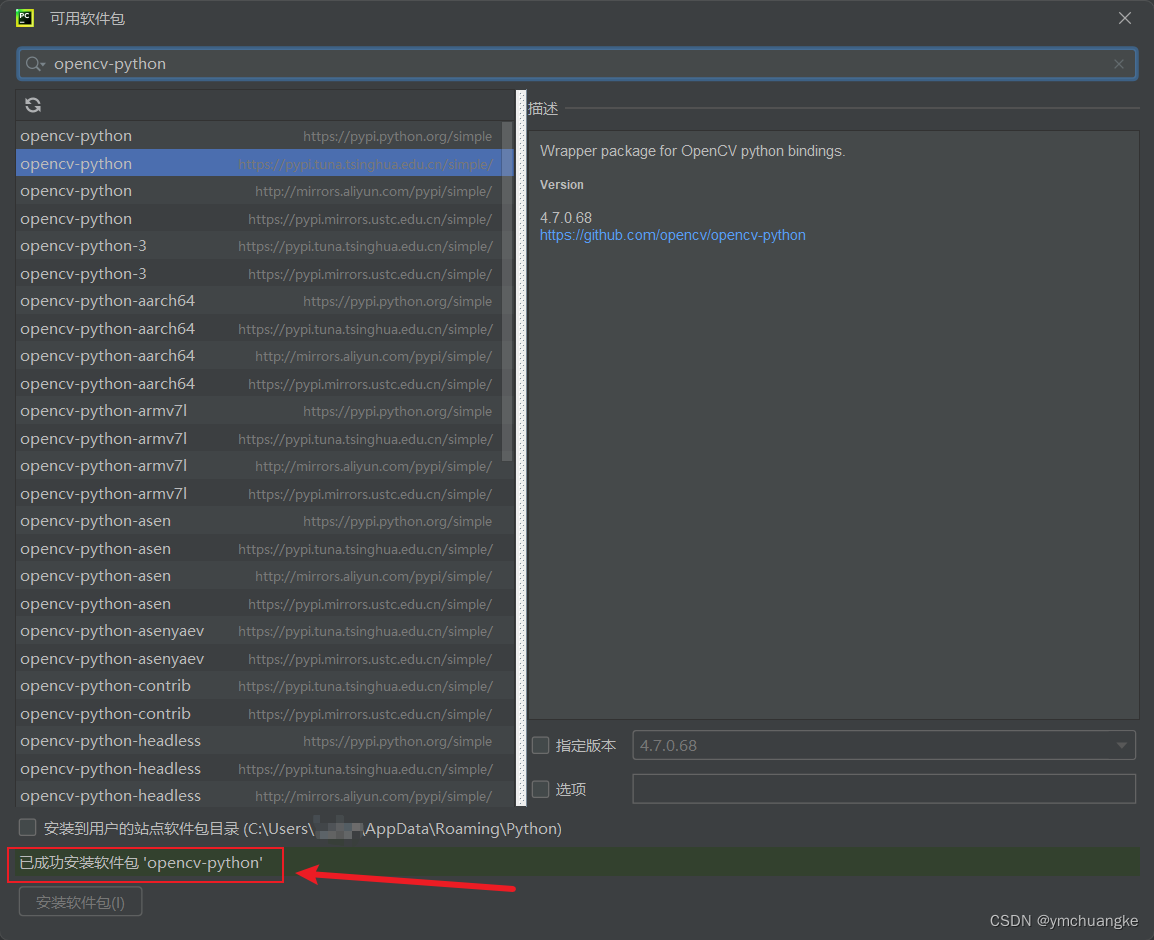
10.安装成功即可,如下图所示,其它包同理即可!
至此相关的一切都已经ok了!
四.解决一些运行yolov5出现的一些问题
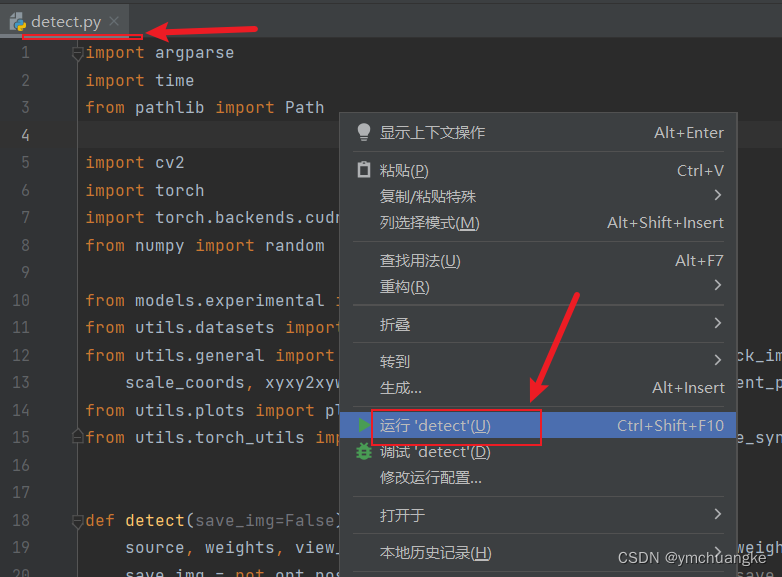
1.打开weights文件夹下的 detect.py,右键点击运行。
2.出现问题【subprocess.CalledProcessError: Command ‘pip install ‘protobuf<3.20,>=3.9.2’’ returned non-zero exit status 1.】

** 解决办法 **
1.这是因为protobuf版本不符合,打开软件包,发现protobuf版本为3.20.3,恰好太高
2.搜索protobuf,并指定版本,并安装软件包即可,如下图所示。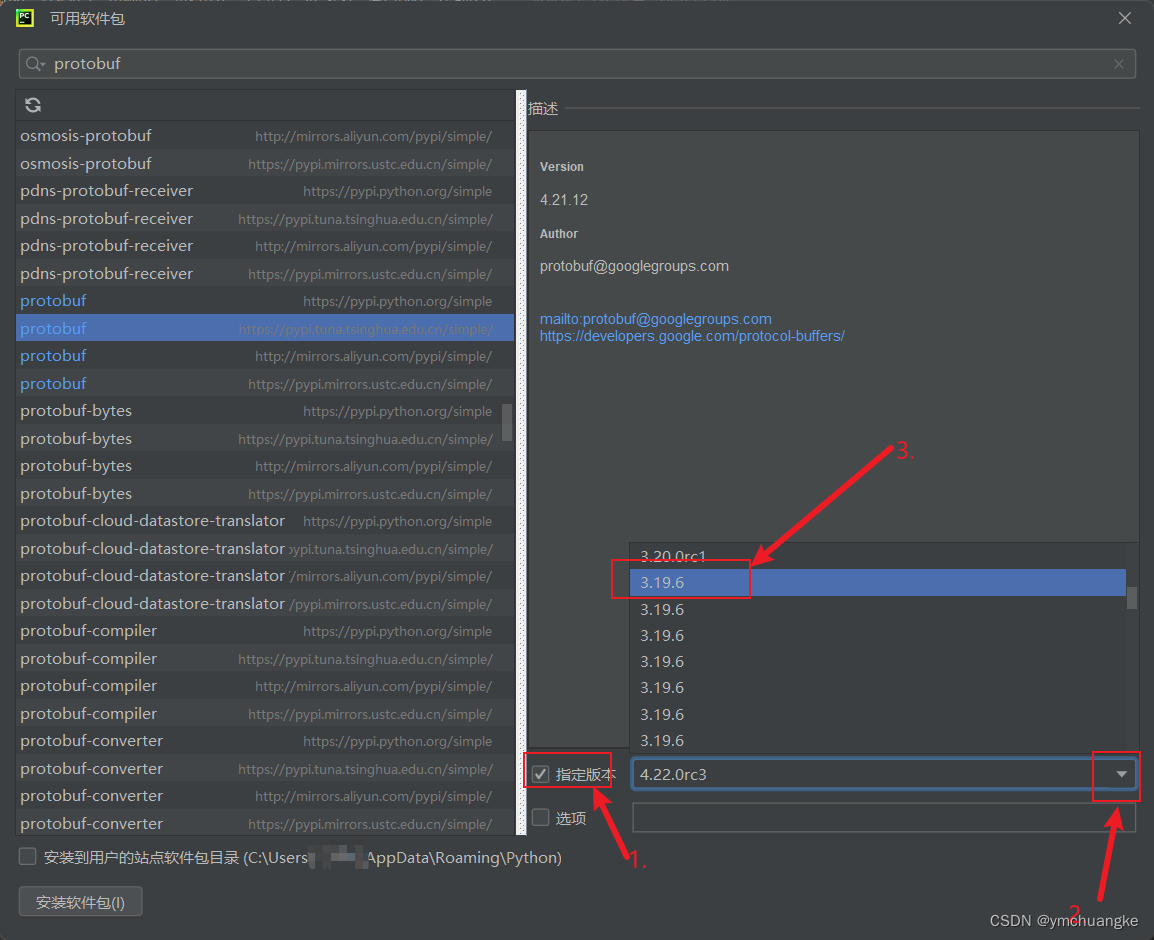
3.再次点击运行,发现该错误已解决!
3.出现问题【AttributeError: Can’t get attribute ‘SPPF’ on <module ‘models.common’ from ‘D:\Users\xxxxx\Desktop\yolov5-5.0_配置\models\common.py’>】

** 解决办法 **
1.按照提示找到:models->common.py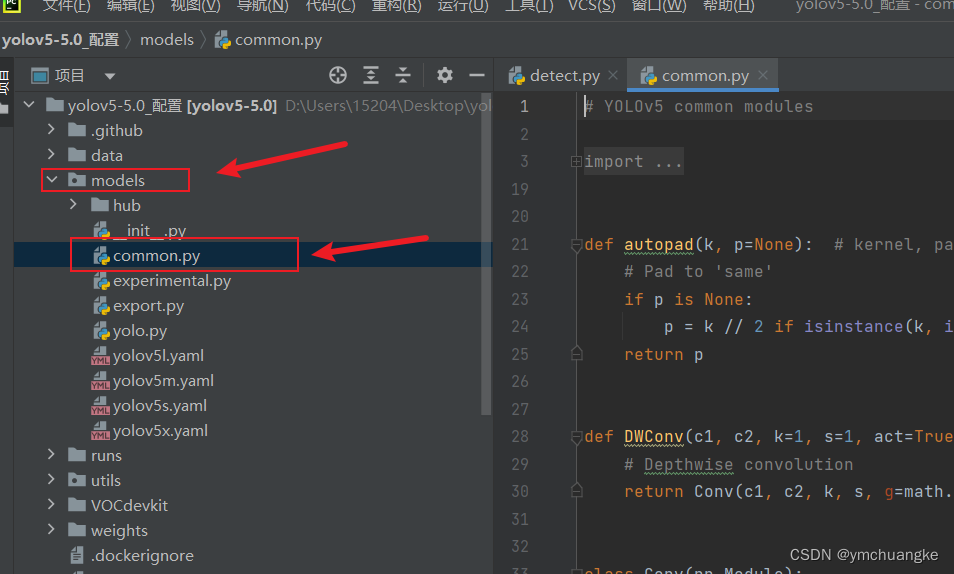
2.找到SPPF,在common的149行
3.在上面复制粘贴,如下图
class SPPF(nn.Module): # Spatial Pyramid Pooling - Fast (SPPF) layer for YOLOv5 by Glenn Jocher def __init__(self, c1, c2, k=5): # equivalent to SPP(k=(5, 9, 13)) super().__init__() c_ = c1 // 2 # hidden channels self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c_ * 4, c2, 1, 1) self.m = nn.MaxPool2d(kernel_size=k, stride=1, padding=k // 2) def forward(self, x): x = self.cv1(x) with warnings.catch_warnings(): warnings.simplefilter('ignore') # suppress torch 1.9.0 max_pool2d() warning y1 = self.m(x) y2 = self.m(y1) return self.cv2(torch.cat([x, y1, y2, self.m(y2)], 1))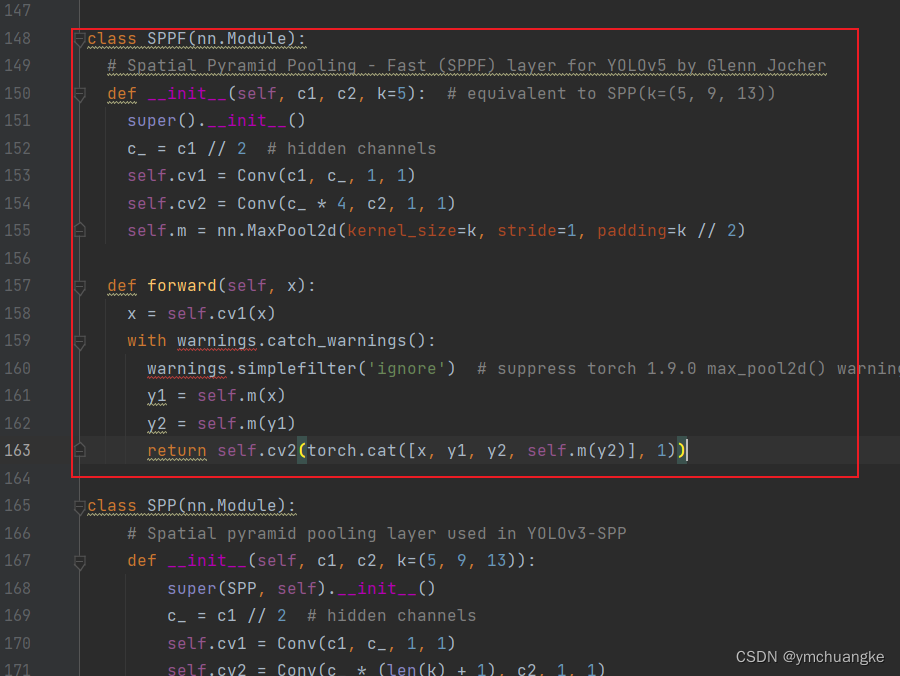
4.接着在最上面导入import warnings,如下图:
import warnings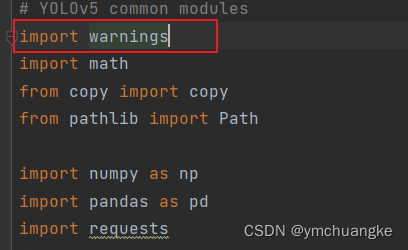
5.再次运行detect.py
4.出现问题【AttributeError: ‘Upsample’ object has no attribute ‘recompute_scale_factor’】

** 解决方法 **
1.直接点击下图选框中的错误提示,或按照文件提示路径找到该文件:
2.记住下述结果。
3.发现在154行,删除(or注销)154行代码,并在153行末尾,删除逗号,添加英文半角下的")",括号,如下图
recompute_scale_factor=self.recompute_scale_factor)
4.再次运行detect.py
5.出现问题【RuntimeError: The size of tensor a (80) must match the size of tensor b (56) at non-singleton dimension 3】

** 解决方法 **
1.这是因为下载的权重文件不匹配导致的。
2.下载相对应的权重文件即可
3.下载网址
4.可能有小伙伴网址打不开,别着急,权重文件我放在资源里,可以到时候直接下载。
5.下载完成后复制粘贴进来即可!
5.1首先点击最大的文件夹,【yolov5-5.0,…】,如下图: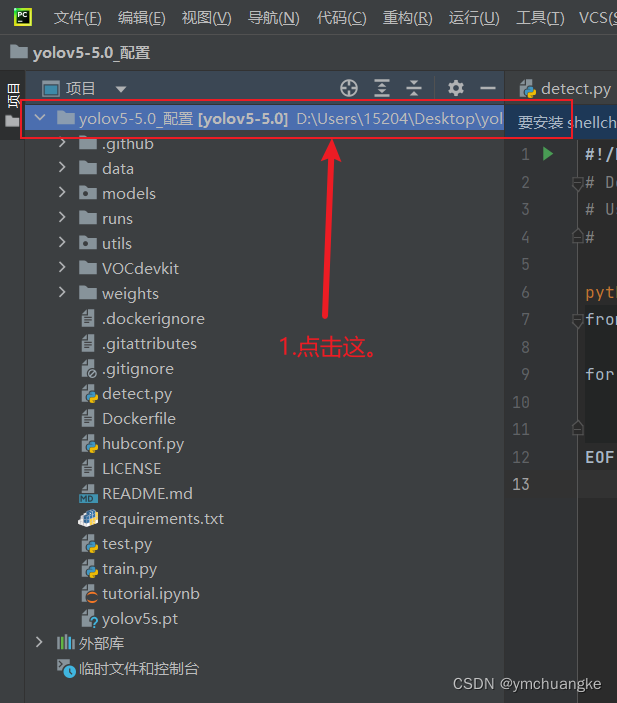
5.2 Ctrl+v 即可,如下图,切记目录不能出错。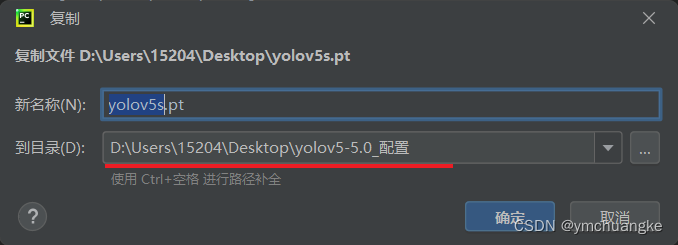
5.3点击覆盖即可!
6.出现问题【NotImplementedError: Could not run ‘torchvision::nms’ with arguments from the ‘CUDA’ backend. 】
** 问题截图 **
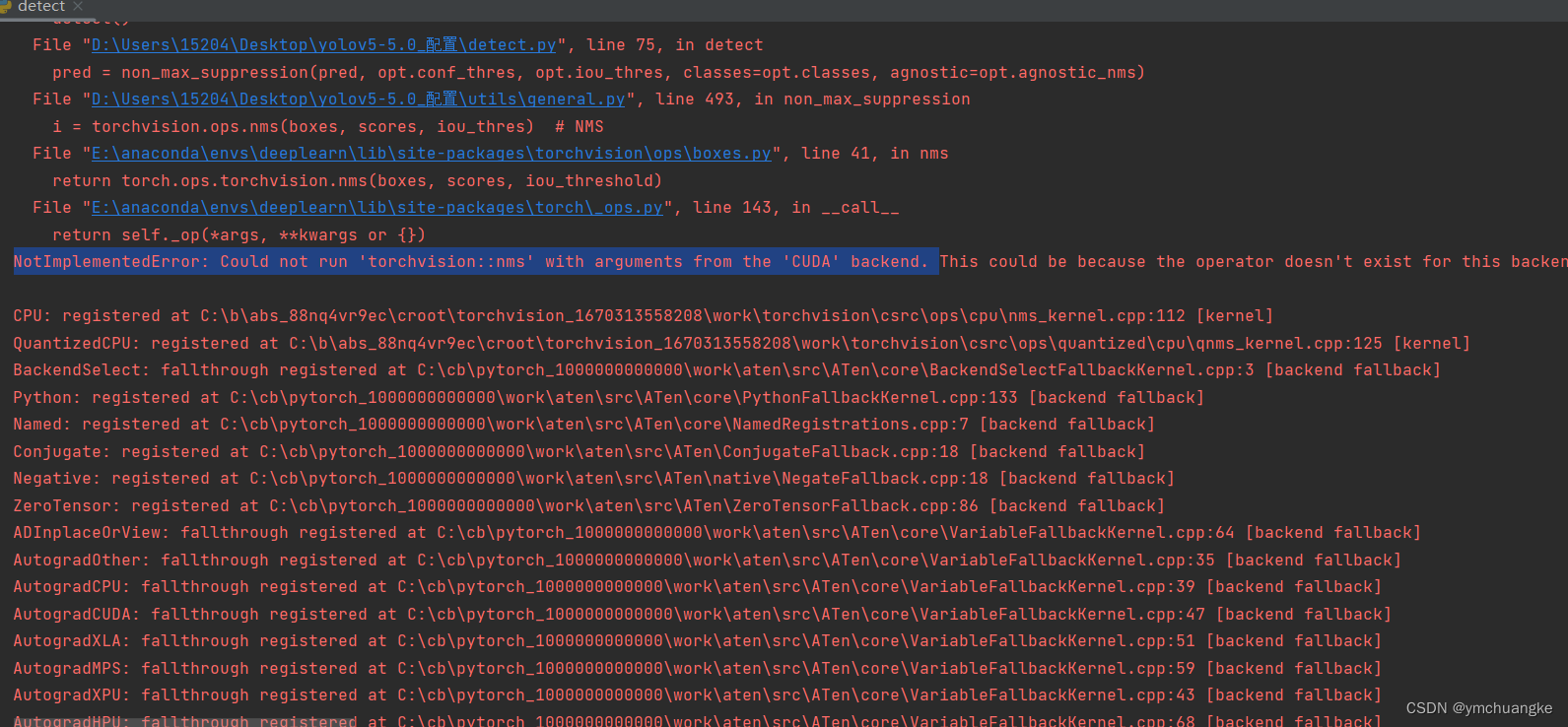
** 解决方法 **
ps:这是我参考另一位博主的,链接放这
ps: 衷心的感谢这位博主!
1.单击下述这行代码,如图
2.在开头导入模块
import my_nms如下图
3.在下面粘贴这行代码,如下图:
return my_nms.nms(boxes,scores,iou_threshold)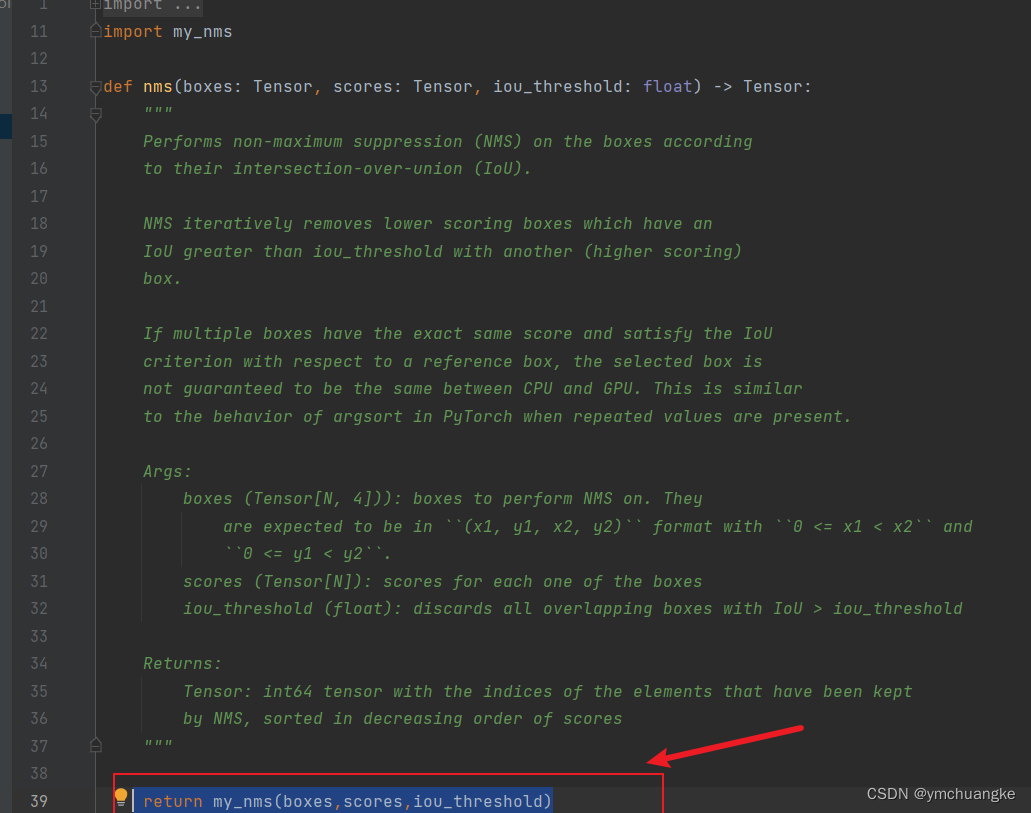
4.同插入yolov5s.pt文件一样,新建一个py文件,里面代码为:
from torch import Tensorimport torch def box_area(boxes: Tensor) -> Tensor: """ Computes the area of a set of bounding boxes, which are specified by its (x1, y1, x2, y2) coordinates. Arguments: boxes (Tensor[N, 4]): boxes for which the area will be computed. They are expected to be in (x1, y1, x2, y2) format Returns: area (Tensor[N]): area for each box """ return (boxes[:, 2] - boxes[:, 0]) * (boxes[:, 3] - boxes[:, 1]) def box_iou(boxes1: Tensor, boxes2: Tensor) -> Tensor: """ Return intersection-over-union (Jaccard index) of boxes. Both sets of boxes are expected to be in (x1, y1, x2, y2) format. Arguments: boxes1 (Tensor[N, 4]) boxes2 (Tensor[M, 4]) Returns: iou (Tensor[N, M]): the NxM matrix containing the pairwise IoU values for every element in boxes1 and boxes2 """ area1 = box_area(boxes1) # 每个框的面积 (N,) area2 = box_area(boxes2) # (M,) lt = torch.max(boxes1[:, None, :2], boxes2[:, :2]) # [N,M,2] # N中一个和M个比较; 所以由N,M 个 rb = torch.min(boxes1[:, None, 2:], boxes2[:, 2:]) # [N,M,2] wh = (rb - lt).clamp(min=0) # [N,M,2] #小于0的为0 clamp 钳;夹钳; inter = wh[:, :, 0] * wh[:, :, 1] # [N,M] iou = inter / (area1[:, None] + area2 - inter) return iou # NxM, boxes1中每个框和boxes2中每个框的IoU值; def nms(boxes: Tensor, scores: Tensor, iou_threshold: float): """ :param boxes: [N, 4], 此处传进来的框,是经过筛选(NMS之前选取过得分TopK)之后, 在传入之前处理好的; :param scores: [N] :param iou_threshold: 0.7 :return: """ keep = [] # 最终保留的结果, 在boxes中对应的索引; idxs = scores.argsort() # 值从小到大的 索引 while idxs.numel() > 0: # 循环直到null; numel(): 数组元素个数 # 得分最大框对应的索引, 以及对应的坐标 max_score_index = idxs[-1] max_score_box = boxes[max_score_index][None, :] # [1, 4] keep.append(max_score_index) if idxs.size(0) == 1: # 就剩余一个框了; break idxs = idxs[:-1] # 将得分最大框 从索引中删除; 剩余索引对应的框 和 得分最大框 计算IoU; other_boxes = boxes[idxs] # [?, 4] ious = box_iou(max_score_box, other_boxes) # 一个框和其余框比较 1XM idxs = idxs[ious[0] <= iou_threshold] keep = idxs.new(keep) # Tensor return keepps : my_nms.py位置如图:
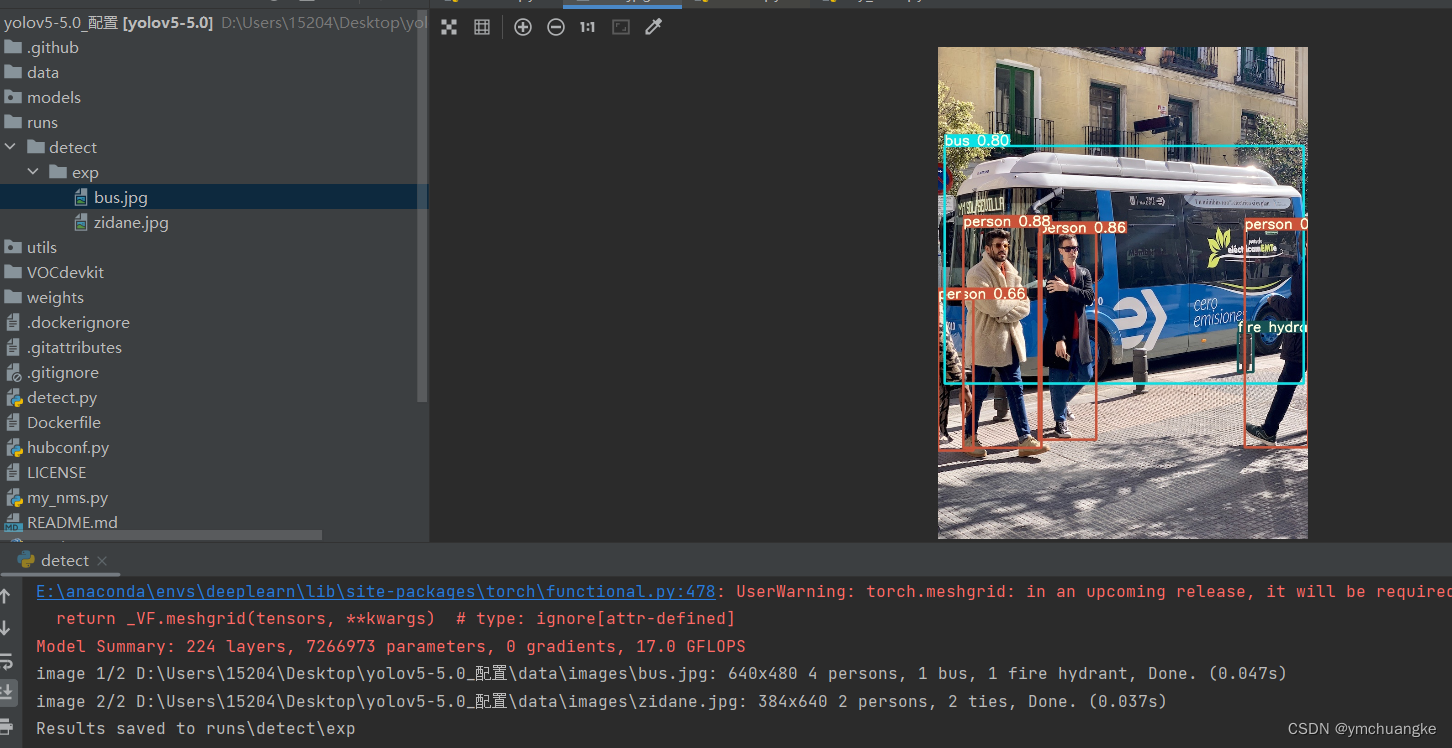
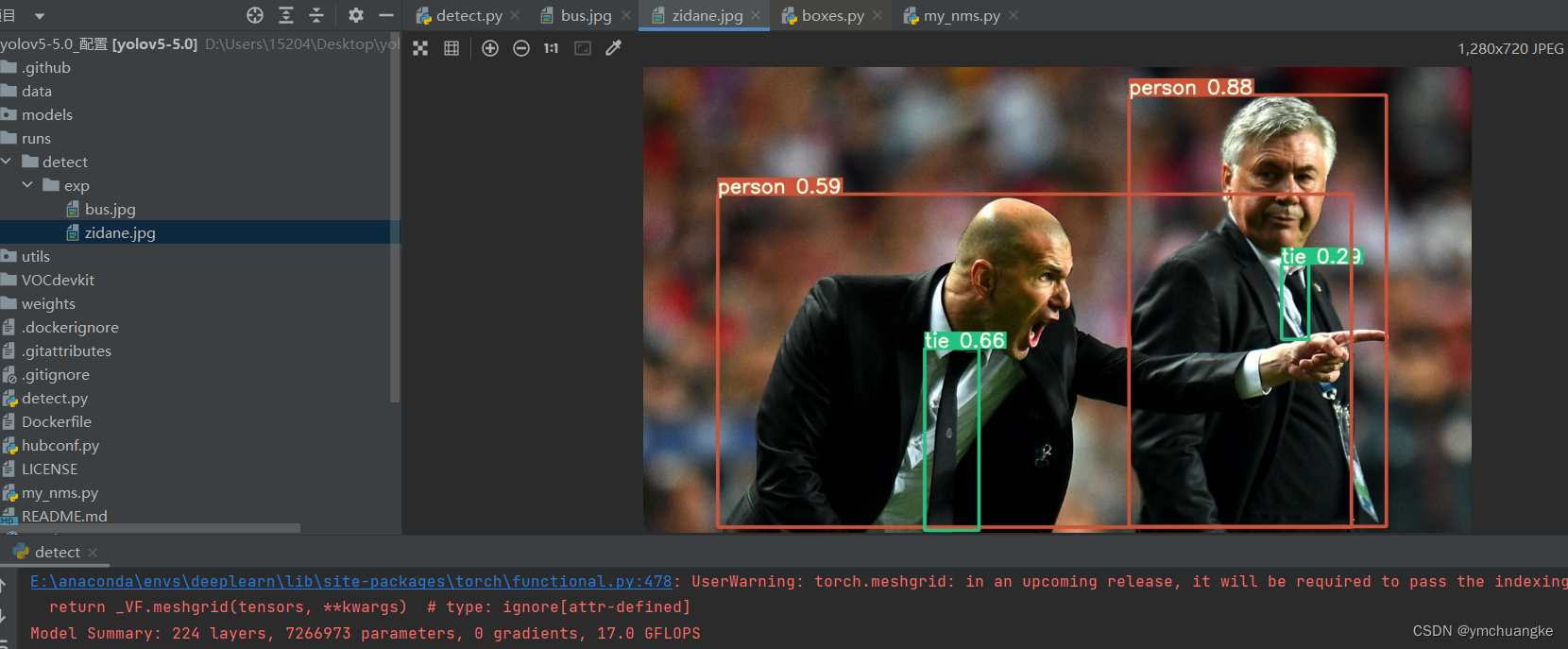
五.运行detect.py,发现运行成功
找到保存的运行结果成功的位置。