文章目录
一、模型转换 onnx2trt二、配置环境变量三、调用推理python示例代码C++ 代码示例测试使用:【Win10+cuda11.0+cudnn8.2.1+TensorRT8.2.5.1】关于安装
一、模型转换 onnx2trt
方法1:使用wang-xinyu/tensorrtx部署yolov5方法:https://wangsp.blog.csdn.net/article/details/121718501
方法2:使用tensorRT转成engine
方法3:使用C++ onnx_tensorrt将onnx转为trt 的推理engine 参考 【python 方法参考】
方法4:直接使用TensorRT部署onnx【参考】
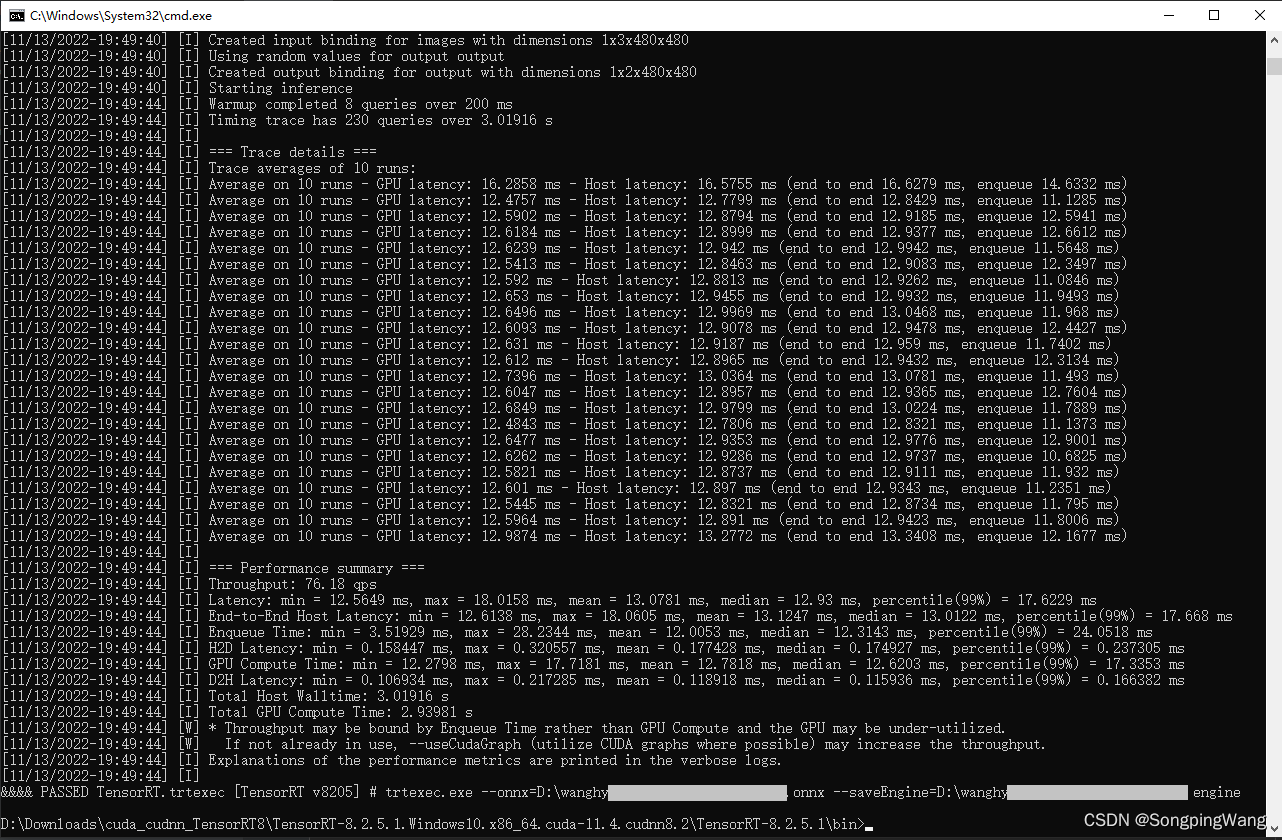
使用 trtexec工具转engine
使用 ./trtexec --help 查看命令:
#生成静态batchsize的engine./trtexec --onnx=<onnx_file> \ #指定onnx模型文件 --explicitBatch \ #在构建引擎时使用显式批大小(默认=隐式)显示批处理 --saveEngine=<tensorRT_engine_file> \ #输出engine --workspace=<size_in_megabytes> \ #设置工作空间大小单位是MB(默认为16MB) --fp16 #除了fp32之外,还启用fp16精度(默认=禁用) #生成动态batchsize的engine./trtexec --onnx=<onnx_file> \#指定onnx模型文件 --minShapes=input:<shape_of_min_batch> \ #最小的NCHW --optShapes=input:<shape_of_opt_batch> \ #最佳输入维度,跟maxShapes一样就好 --maxShapes=input:<shape_of_max_batch> \ #最大输入维度 --workspace=<size_in_megabytes> \ #设置工作空间大小单位是MB(默认为16MB) --saveEngine=<engine_file> \ #输出engine --fp16 #除了fp32之外,还启用fp16精度(默认=禁用)#小尺寸的图片可以多batchsize即8x3x416x416/home/zxl/TensorRT-7.2.3.4/bin/trtexec --onnx=yolov4_-1_3_416_416_dynamic.onnx \ --minShapes=input:1x3x416x416 \ --optShapes=input:8x3x416x416 \ --maxShapes=input:8x3x416x416 \ --workspace=4096 \ --saveEngine=yolov4_-1_3_416_416_dynamic_b8_fp16.engine \ --fp16#由于内存不够了所以改成4x3x608x608/home/zxl/TensorRT-7.2.3.4/bin/trtexec --onnx=yolov4_-1_3_608_608_dynamic.onnx \ --minShapes=input:1x3x608x608 \ --optShapes=input:4x3x608x608 \ --maxShapes=input:4x3x608x608 \ --workspace=4096 \ --saveEngine=yolov4_-1_3_608_608_dynamic_b4_fp16.engine \ --fp16 测试,执行: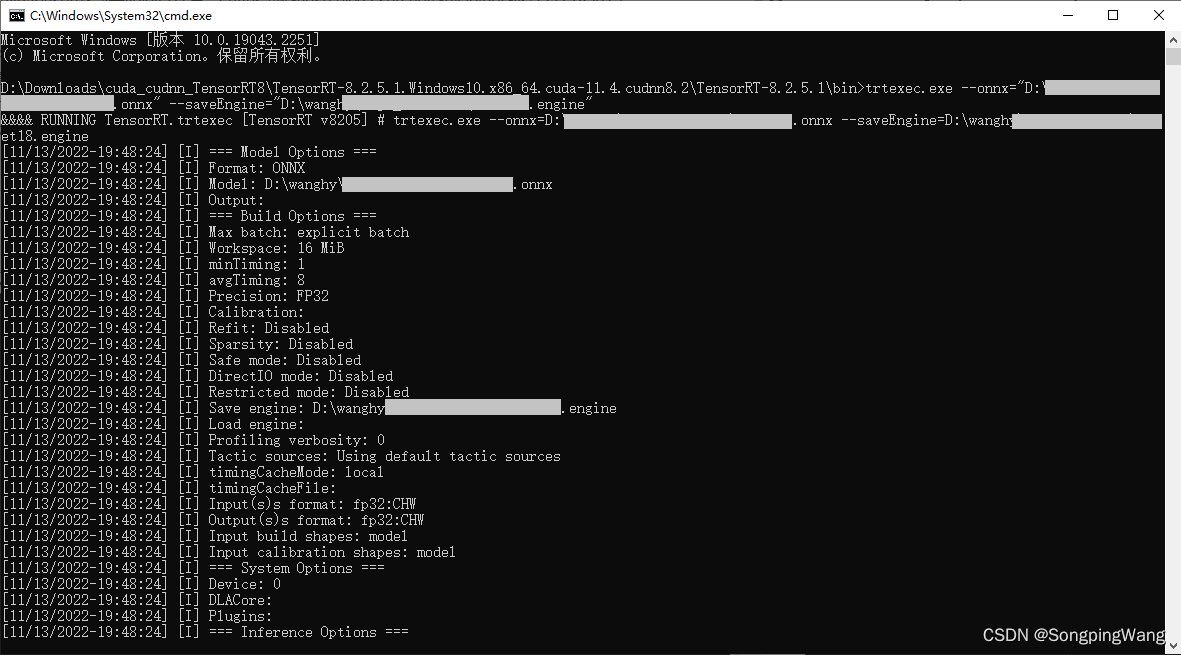
二、配置环境变量
################ TenorRT 包含目录 ######################C:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.0\include;D:\opencv_build\install\include;D:\opencv_build\install\include\opencv2;D:\Downloads\cuda_cudnn_TensorRT8\TensorRT-8.2.5.1.Windows10.x86_64.cuda-11.4.cudnn8.2\TensorRT-8.2.5.1\samples\common#################### TenorRT 库目录 ############################D:\opencv_build\install\x64\vc16\lib\*.libC:\Program Files\NVIDIA GPU Computing Toolkit\CUDA\v11.0\lib\x64\*.lib三、调用推理
使用pycuda【下载】地址。模型训练代码来自 https://github.com/bubbliiiing
安装pycuda 对应python的版本:pycuda-2020.1+cuda101-cp38-cp38-win_amd64.whl
安装tensorrt对应python的版本:tensorrt-8.2.5.1-cp38-none-win_amd64.whl(来自TensorRT-8.2.5.1.Windows10.x86_64.cuda-11.4.cudnn8.2\TensorRT-8.2.5.1\python目录下)
TensorRT调用步骤
创建IBuilder的指针builder设置推理的显存大小设置推理的模式,float或者int利用builder创建ICudaEngine的实例engine由engine创建上下文context利用context进行推理,得到结果释放显存空间python示例代码
# --*-- coding:utf-8 --*--import pycuda.autoinitimport pycuda.driver as cudaimport tensorrt as trtimport torchimport timefrom PIL import Imageimport cv2, osimport torchvisionimport numpy as npfilename = '/home/img.png'max_batch_size = 1onnx_model_path = "./resnet18.onnx"TRT_LOGGER = trt.Logger(trt.Logger.WARNING)def get_img_np_nchw(filename): image = cv2.imread(filename) image_cv = cv2.cvtColor(image, cv2.COLOR_BGR2RGB) image_cv = cv2.resize(image_cv, (224, 224)) miu = np.array([0.485, 0.456, 0.406]).reshape(3, 1, 1) std = np.array([0.229, 0.224, 0.225]).reshape(3, 1, 1) img_np = np.array(image_cv, dtype=np.float) / 255. img_np = img_np.transpose((2, 0, 1)) img_np -= miu img_np /= std img_np_nchw = img_np[np.newaxis] img_np_nchw = np.tile(img_np_nchw, (max_batch_size, 1, 1, 1)) return img_np_nchwclass HostDeviceMem(object): def __init__(self, host_mem, device_mem): """ host_mem: cpu memory device_mem: gpu memory """ self.host = host_mem self.device = device_mem def __str__(self): return "Host:\n" + str(self.host) + "\nDevice:\n" + str(self.device) def __repr__(self): return self.__str__()def allocate_buffers(engine): inputs, outputs, bindings = [], [], [] stream = cuda.Stream() for binding in engine: # print(binding) # 绑定的输入输出 # print(engine.get_binding_shape(binding)) # get_binding_shape 是变量的大小 size = trt.volume(engine.get_binding_shape(binding)) * engine.max_batch_size # volume 计算可迭代变量的空间,指元素个数 # size = trt.volume(engine.get_binding_shape(binding)) # 如果采用固定bs的onnx,则采用该句 dtype = trt.nptype(engine.get_binding_dtype(binding)) # get_binding_dtype 获得binding的数据类型 # nptype等价于numpy中的dtype,即数据类型 # allocate host and device buffers host_mem = cuda.pagelocked_empty(size, dtype) # 创建锁业内存 device_mem = cuda.mem_alloc(host_mem.nbytes) # cuda分配空间 # print(int(device_mem)) # binding在计算图中的缓冲地址 bindings.append(int(device_mem)) # append to the appropriate list if engine.binding_is_input(binding): inputs.append(HostDeviceMem(host_mem, device_mem)) else: outputs.append(HostDeviceMem(host_mem, device_mem)) return inputs, outputs, bindings, streamdef get_engine(max_batch_size=1, onnx_file_path="", engine_file_path="", fp16_mode=False, save_engine=False): """ params max_batch_size: 预先指定大小好分配显存 params onnx_file_path: onnx文件路径 params engine_file_path: 待保存的序列化的引擎文件路径 params fp16_mode: 是否采用FP16 params save_engine: 是否保存引擎 returns: ICudaEngine """ # 如果已经存在序列化之后的引擎,则直接反序列化得到cudaEngine if os.path.exists(engine_file_path): print("Reading engine from file: {}".format(engine_file_path)) with open(engine_file_path, 'rb') as f, \ trt.Runtime(TRT_LOGGER) as runtime: return runtime.deserialize_cuda_engine(f.read()) # 反序列化 else: # 由onnx创建cudaEngine # 使用logger创建一个builder # builder创建一个计算图 INetworkDefinition explicit_batch = 1 << (int)(trt.NetworkDefinitionCreationFlag.EXPLICIT_BATCH) # In TensorRT 7.0, the ONNX parser only supports full-dimensions mode, meaning that your network definition must be created with the explicitBatch flag set. For more information, see Working With Dynamic Shapes. with trt.Builder(TRT_LOGGER) as builder, \ builder.create_network(explicit_batch) as network, \ trt.OnnxParser(network, TRT_LOGGER) as parser: # 使用onnx的解析器绑定计算图,后续将通过解析填充计算图 builder.max_workspace_size = 1 << 30 # 预先分配的工作空间大小,即ICudaEngine执行时GPU最大需要的空间 builder.max_batch_size = max_batch_size # 执行时最大可以使用的batchsize builder.fp16_mode = fp16_mode # 解析onnx文件,填充计算图 if not os.path.exists(onnx_file_path): quit("ONNX file {} not found!".format(onnx_file_path)) print('loading onnx file from path {} ...'.format(onnx_file_path)) with open(onnx_file_path, 'rb') as model: # 二值化的网络结果和参数 print("Begining onnx file parsing") parser.parse(model.read()) # 解析onnx文件 # parser.parse_from_file(onnx_file_path) # parser还有一个从文件解析onnx的方法 print("Completed parsing of onnx file") # 填充计算图完成后,则使用builder从计算图中创建CudaEngine print("Building an engine from file{}' this may take a while...".format(onnx_file_path)) ################# print(network.get_layer(network.num_layers - 1).get_output(0).shape) # network.mark_output(network.get_layer(network.num_layers -1).get_output(0)) engine = builder.build_cuda_engine(network) # 注意,这里的network是INetworkDefinition类型,即填充后的计算图 print("Completed creating Engine") if save_engine: # 保存engine供以后直接反序列化使用 with open(engine_file_path, 'wb') as f: f.write(engine.serialize()) # 序列化 return enginedef do_inference(context, bindings, inputs, outputs, stream, batch_size=1): # Transfer data from CPU to the GPU. [cuda.memcpy_htod_async(inp.device, inp.host, stream) for inp in inputs] # htod: host to device 将数据由cpu复制到gpu device # Run inference. context.execute_async_v2(bindings=bindings, stream_handle=stream.handle) # 当创建network时显式指定了batchsize, 则使用execute_async_v2, 否则使用execute_async # Transfer predictions back from the GPU. [cuda.memcpy_dtoh_async(out.host, out.device, stream) for out in outputs] # gpu to cpu # Synchronize the stream stream.synchronize() # Return only the host outputs. return [out.host for out in outputs]def postprocess_the_outputs(h_outputs, shape_of_output): h_outputs = h_outputs.reshape(*shape_of_output) return h_outputsimg_np_nchw = get_img_np_nchw(filename).astype(np.float32)# These two modes are depend on hardwaresfp16_mode = Falsetrt_engine_path = "./model_fp16_{}.trt".format(fp16_mode)# Build an cudaEngineengine = get_engine(max_batch_size, onnx_model_path, trt_engine_path, fp16_mode)# 创建CudaEngine之后,需要将该引擎应用到不同的卡上配置执行环境context = engine.create_execution_context()inputs, outputs, bindings, stream = allocate_buffers(engine) # input, output: host # bindings# Do inferenceshape_of_output = (max_batch_size, 1000)# Load data to the bufferinputs[0].host = img_np_nchw.reshape(-1)# inputs[1].host = ... for multiple inputt1 = time.time()trt_outputs = do_inference(context, bindings=bindings, inputs=inputs, outputs=outputs, stream=stream) # numpy datat2 = time.time()feat = postprocess_the_outputs(trt_outputs[0], shape_of_output)print('TensorRT ok')model = torchvision.models.resnet18(pretrained=True).cuda()resnet_model = model.eval()input_for_torch = torch.from_numpy(img_np_nchw).cuda()t3 = time.time()feat_2 = resnet_model(input_for_torch)t4 = time.time()feat_2 = feat_2.cpu().data.numpy()print('Pytorch ok!')mse = np.mean((feat - feat_2) ** 2)print("Inference time with the TensorRT engine: {}".format(t2 - t1))print("Inference time with the PyTorch model: {}".format(t4 - t3))print('MSE Error = {}'.format(mse))print('All completed!')C++ 代码示例
TensorRT 傻瓜式部署流程:参考
#include <string>#include <algorithm>#include <assert.h>#include <cmath>#include <cuda_runtime_api.h>#include <fstream>#include <iomanip>#include <iostream>#include <sstream>#include <sys/stat.h>#include <time.h>#include <opencv2/opencv.hpp>#include <io.h>#include "NvInfer.h"#include "NvOnnxParser.h"#include "argsParser.h"#include "logger.h"#include "common.h"#ifndef NOMINMAX#ifndef max_idx#define max_idx(a,b) (((a) > (b)) ? (0) : (1))#endif#endif /* NOMINMAX */#define DebugP(x) std::cout << "Line" << __LINE__ << " " << #x << "=" << x << std::endlusing namespace nvinfer1;samplesCommon::Args gArgs;using namespace sample;static const int INPUT_H = 480;static const int INPUT_W = 480;static const int INPUT_C = 3;static constexpr int INPUT_SIZE = INPUT_H * INPUT_W * 3;static constexpr int OUTPUT_SIZE = INPUT_H * INPUT_W * 2;static const cv::Size newShape = cv::Size(INPUT_W, INPUT_H);const std::string trtModelName = "D:\\xxx.engine";const std::string onnxModeName = "D:\\xxx.onnx";const std::string file_name = "D:\\xxx.jpg";struct TensorRT {IExecutionContext* context;ICudaEngine* engine;IRuntime* runtime;};void image_to_center(const cv::Mat& image, cv::Mat& outImage, cv::Mat& IM, const cv::Scalar& color){cv::Size shape = image.size();float scale_xy = std::min((float)newShape.height / (float)shape.height,(float)newShape.width / (float)shape.width);cv::Mat M = (cv::Mat_<float>(2, 3) <<scale_xy, 0, -scale_xy * (float)shape.width * 0.5 + (float)newShape.width * 0.5,0, scale_xy, -scale_xy * (float)shape.height * 0.5 + (float)newShape.height * 0.5);cv::invertAffineTransform(M, IM);cv::warpAffine(image, outImage, M, newShape, 1, 0, color);}void center_to_image(const cv::Mat& image, cv::Mat& outImage, cv::Mat& IM){cv::warpAffine(image, outImage, IM, newShape);}void normal_image2blob(float* blob, cv::Mat& img) {for (int c = 0; c < 3; ++c) {for (int i = 0; i < img.rows; ++i) {cv::Vec3b* p1 = img.ptr<cv::Vec3b>(i);for (int j = 0; j < img.cols; ++j) {blob[c * img.cols * img.rows + i * img.cols + j] = p1[j][c] * 0.00392156862745098;}}}}bool onnxToTRTModel(const std::string& modelFile, // name of the onnx modelunsigned int maxBatchSize, // batch size - NB must be at least as large as the batch we want to run withIHostMemory*& trtModelStream) // output buffer for the TensorRT model{// create the builderIBuilder* builder = createInferBuilder(gLogger.getTRTLogger());assert(builder != nullptr);nvinfer1::INetworkDefinition* network = builder->createNetworkV2(maxBatchSize);nvinfer1::IBuilderConfig* config = builder->createBuilderConfig();config->setMaxWorkspaceSize(1 << 20);// parserauto parser = nvonnxparser::createParser(*network, gLogger.getTRTLogger());if (!parser->parseFromFile(modelFile.c_str(), static_cast<int>(gLogger.getReportableSeverity()))){gLogError << "Failure while parsing ONNX file" << std::endl;return false;}if (builder->platformHasFastFp16()) {config->setFlag(nvinfer1::BuilderFlag::kFP16);}else {std::cout << "This platform does not support fp16" << std::endl;}// Build the engineICudaEngine* engine = builder->buildEngineWithConfig(*network, *config);assert(engine);// serialize the engine, then close everything downtrtModelStream = engine->serialize();parser->destroy();engine->destroy();network->destroy();builder->destroy();std::ofstream ofs(trtModelName.c_str(), std::ios::out | std::ios::binary);ofs.write((char*)(trtModelStream->data()), trtModelStream->size());ofs.close();DebugP("Trt model save success!");return true;}TensorRT* LoadNet(const char* trtFileName){std::ifstream t(trtFileName, std::ios::in | std::ios::binary);std::stringstream tempStream;tempStream << t.rdbuf();t.close();DebugP("TRT File Loaded successfully!");tempStream.seekg(0, std::ios::end);const int modelSize = tempStream.tellg();tempStream.seekg(0, std::ios::beg);void* modelMem = malloc(modelSize);tempStream.read((char*)modelMem, modelSize);IRuntime* runtime = createInferRuntime(gLogger);if (runtime == nullptr){DebugP("Build Runtime Failure");return 0;}if (gArgs.useDLACore >= 0){runtime->setDLACore(gArgs.useDLACore);}ICudaEngine* engine = runtime->deserializeCudaEngine(modelMem, modelSize, nullptr);if (engine == nullptr){DebugP("Build Engine Failure");return 0;}IExecutionContext* context = engine->createExecutionContext();if (context == nullptr){DebugP("Build Context Failure");return 0;}TensorRT* trt = new TensorRT();trt->context = context;trt->engine = engine;trt->runtime = runtime;DebugP("Build trt Model Success!");return trt;}void doInference(IExecutionContext& context, float* input, float* output, int batchSize){const ICudaEngine& engine = context.getEngine();assert(engine.getNbBindings() == 2);void* buffers[2];int inputIndex, outputIndex;for (int b = 0; b < engine.getNbBindings(); ++b){if (engine.bindingIsInput(b))inputIndex = b;elseoutputIndex = b;}std::cout << "inputIndex=" << inputIndex << "\n";std::cout << "outputIndex=" << outputIndex << "\n";// create GPU buffers and a streamCHECK(cudaMalloc(&buffers[inputIndex], batchSize * INPUT_C * INPUT_H * INPUT_W * sizeof(float)));CHECK(cudaMalloc(&buffers[outputIndex], batchSize * OUTPUT_SIZE * sizeof(float)));cudaStream_t stream;CHECK(cudaStreamCreate(&stream));// DMA the input to the GPU, execute the batch asynchronously, and DMA it back:CHECK(cudaMemcpyAsync(buffers[inputIndex], input, batchSize * INPUT_C * INPUT_H * INPUT_W * sizeof(float), cudaMemcpyHostToDevice, stream));context.enqueue(batchSize, buffers, stream, nullptr);CHECK(cudaMemcpyAsync(output, buffers[outputIndex], batchSize * OUTPUT_SIZE * sizeof(float), cudaMemcpyDeviceToHost, stream));cudaStreamSynchronize(stream);// release the stream and the bufferscudaStreamDestroy(stream);CHECK(cudaFree(buffers[inputIndex]));CHECK(cudaFree(buffers[outputIndex]));}void PostProcessing(float* out, cv::Mat& image_clone, cv::Mat& IM, cv::Size& rawShape){uchar colors[2][3] = { {0,0,0},{128,0,0} };constexpr int single_len = INPUT_W * INPUT_H;cv::Mat mask_mat = cv::Mat::zeros(INPUT_W, INPUT_H, CV_8UC3);float src[2] = { 0 };uchar color_idx = 0;for (size_t i = 0; i < INPUT_H; i++) {uchar* mask_ptr = mask_mat.ptr<uchar>(i);for (size_t j = 0; j < INPUT_W; j++) {color_idx = max_idx(out[i * INPUT_W + j], out[single_len + i * INPUT_W + j]);*mask_ptr++ = colors[color_idx][2];*mask_ptr++ = colors[color_idx][1];*mask_ptr++ = colors[color_idx][0];}}//cv::imwrite("../mask_mat.png", mask_mat);//cv::warpAffine(mask_mat, mask_mat, IM, rawShape);//cv::addWeighted(image_clone, 0.6, mask_mat, 0.4, 0, image_clone);//cv::imwrite("../image_clone.png", image_clone);}int main(int argc, char** argv){IHostMemory* trtModelStream{ nullptr };TensorRT* ptensor_rt;IExecutionContext* context = nullptr;IRuntime* runtime = nullptr;ICudaEngine* engine = nullptr;if (_access(trtModelName.c_str(), 0) != 1){ptensor_rt = LoadNet(trtModelName.c_str());context = ptensor_rt->context;runtime = ptensor_rt->runtime;engine = ptensor_rt->engine;}else{if (!onnxToTRTModel(onnxModeName, 1, trtModelStream))return 1;assert(trtModelStream != nullptr);std::cout << "Successfully parsed ONNX file!!!!" << std::endl;// deserialize the engineruntime = createInferRuntime(gLogger);assert(runtime != nullptr);if (gArgs.useDLACore >= 0){runtime->setDLACore(gArgs.useDLACore);}engine = runtime->deserializeCudaEngine(trtModelStream->data(), trtModelStream->size(), nullptr);assert(engine != nullptr);trtModelStream->destroy();context = engine->createExecutionContext();assert(context != nullptr);}// 输入预处理std::cout << "Start reading the input image!!!!" << std::endl;cv::Mat image = cv::imread(file_name, cv::IMREAD_COLOR);cv::cvtColor(image, image, cv::COLOR_BGR2RGB);cv::Mat image_clone = image.clone();cv::Size rawShape = image.size();// 图像转成blobcv::Mat outImage, IM;image_to_center(image, outImage, IM, cv::Scalar(128, 128, 128));float* blob = new float[INPUT_SIZE] { 0 };normal_image2blob(blob, outImage);float* out = new float[OUTPUT_SIZE] { 0 };// 推理计时typedef std::chrono::high_resolution_clock Time;typedef std::chrono::duration<double, std::ratio<1, 1000>> ms;typedef std::chrono::duration<float> fsec;double total = 0.0;auto t0 = Time::now();doInference(*context, blob, out, 1);auto t1 = Time::now();fsec fs = t1 - t0;ms d = std::chrono::duration_cast<ms>(fs);total += d.count();// 网络输出的后处理PostProcessing(out, image_clone,IM, rawShape);// 释放缓存context->destroy();engine->destroy();runtime->destroy();if (blob){delete[] blob;}if (out){delete[] out;}std::cout << std::endl << "Running time of one image is:" << total << "ms" << std::endl;return 0;}编译添加预处理:_CRT_SECURE_NO_WARNINGS