YOLOAir:助力YOLO论文改进? 、 不同数据集涨点?、创新点改进?
Backbone、Neck、Head、注意力机制、IoU损失函数、NMS、Loss计算方式、自注意力机制、数据增强部分、激活函数等部分,详情可以关注? YOLOAir 的说明文档。?同时附带各种改进点原理及对应的代码改进方式教程,用户可根据自身情况快速排列组合,在不同的数据集上实验, 应用组合写论文, 创造自己的毕业项目!? 对于这块有疑问的,可以在评论区提出,或者私信CSDN。?
本篇是《YOLOv7结合Swin Transformer V2结构?》的修改 演示
使用YOLOv7网络?作为示范,可以加入到 YOLOv7、YOLOX、YOLOR、YOLOv4、Scaled_YOLOv4、YOLOv3等一系列YOLO算法模块
文章目录
Swin Transformer论文YOLOv7结合Swin Transformer-V2 演示教程
Swin Transformer论文
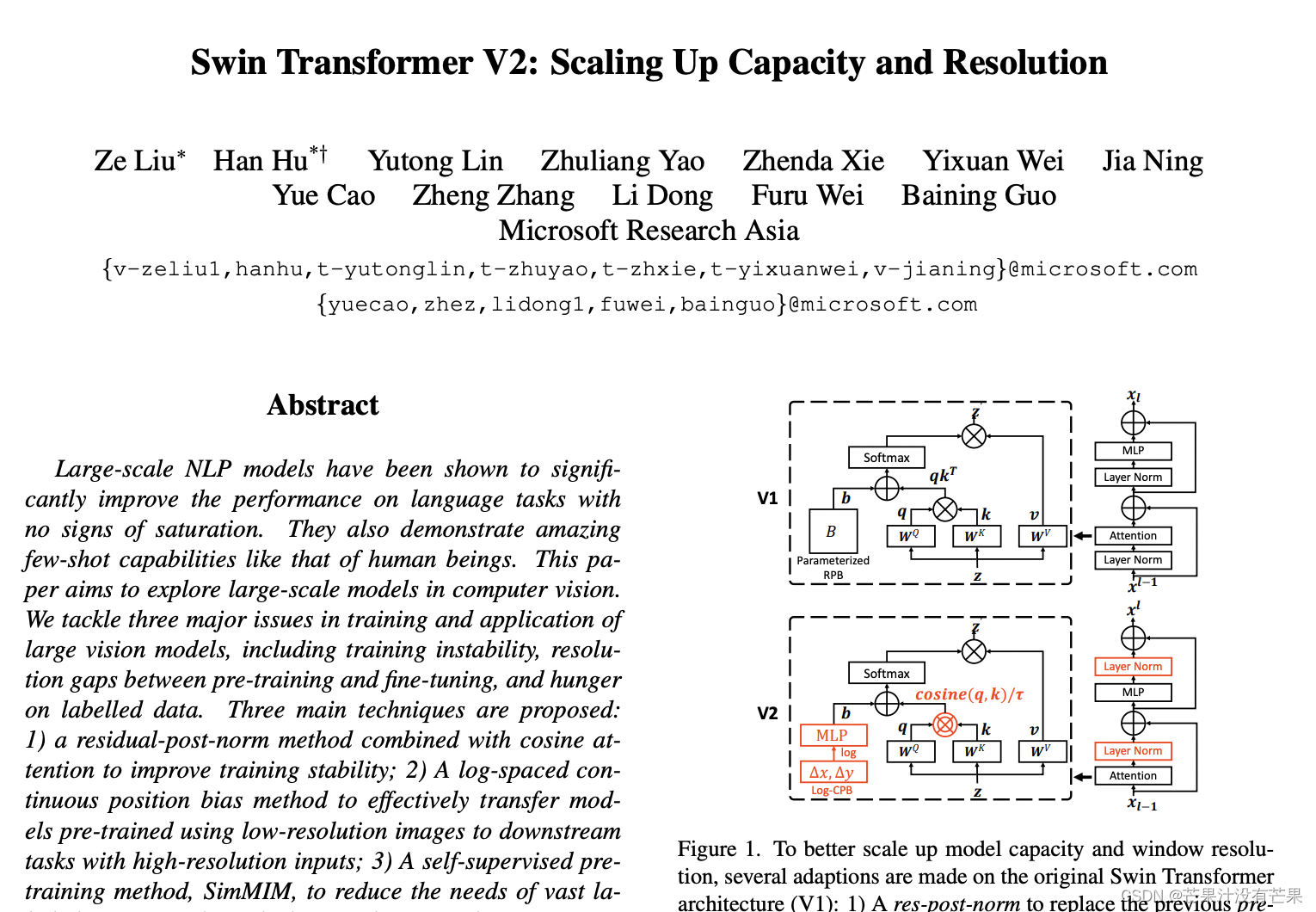
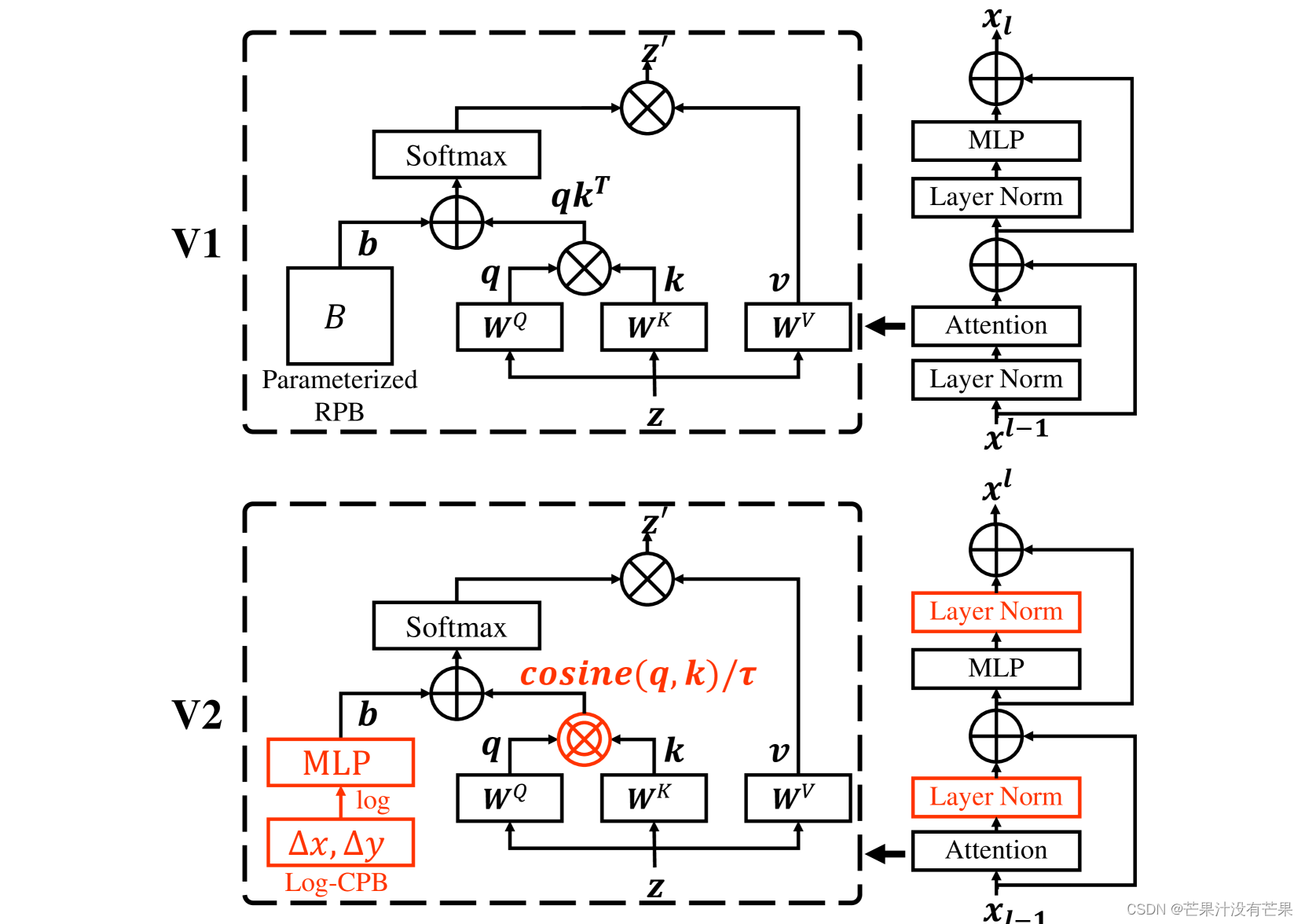
该论文作者提出了缩放 Swin Transformer 的技术 多达 30 亿个参数,使其能够使用多达 1,536 个图像进行训练1,536 分辨率。通过扩大容量和分辨率,Swin Transformer 在四个具有代表性的视觉基准上创造了新记录:ImageNet-V2 图像分类的84.0% top-1 准确率,COCO 对象检测的63.1 / 54.4 box / mask mAP,ADE20K 语义分割的59.9 mIoU,和86.8%Kinetics-400 视频动作分类的前 1 准确率。我们的技术通常适用于扩大视觉模型,但尚未像 NLP 语言模型那样被广泛探索,部分原因是在训练和应用方面存在以下困难:1)视觉模型经常面临大规模的不稳定性问题和 2)许多下游视觉任务需要高分辨率图像或窗口,目前尚不清楚如何有效地将低分辨率预训练的模型转移到更高分辨率的模型。当图像分辨率很高时,GPU 内存消耗也是一个问题。为了解决这些问题,我们提出了几种技术,并通过使用 Swin Transformer 作为案例研究来说明:1)后归一化技术和缩放余弦注意方法,以提高大型视觉模型的稳定性;2) 一种对数间隔的连续位置偏差技术,可有效地将在低分辨率图像和窗口上预训练的模型转移到其更高分辨率的对应物上。此外,我们分享了我们的关键实现细节,这些细节可以显着节省 GPU 内存消耗,从而使使用常规 GPU 训练大型视觉模型变得可行。使用这些技术和自我监督的预训练,我们成功训练了一个强大的 30 亿个 Swin Transformer 模型,并有效地将其转移到涉及高分辨率图像或窗口的各种视觉任务中,在各种的基准。代码将在 我们分享了我们的关键实现细节,这些细节可以显着节省 GPU 内存消耗,从而使使用常规 GPU 训练大型视觉模型变得可行。使用这些技术和自我监督的预训练,我们成功训练了一个强大的 30 亿个 Swin Transformer 模型,并有效地将其转移到涉及高分辨率图像或窗口的各种视觉任务中,在各种的基准。代码将在 我们分享了我们的关键实现细节,这些细节可以显着节省 GPU 内存消耗,从而使使用常规 GPU 训练大型视觉模型变得可行。使用这些技术和自我监督的预训练,我们成功训练了一个强大的 30 亿个 Swin Transformer 模型,并有效地将其转移到涉及高分辨率图像或窗口的各种视觉任务中,在各种的基准。代码将在 我们成功训练了一个强大的 30 亿个 Swin Transformer 模型,并将其有效地转移到涉及高分辨率图像或窗口的各种视觉任务中,在各种基准测试中达到了最先进的精度。代码将在 我们成功训练了一个强大的 30 亿个 Swin Transformer 模型,并将其有效地转移到涉及高分辨率图像或窗口的各种视觉任务中,在各种基准测试中达到了最先进的精度。
YOLOv7结合Swin Transformer-V2 演示教程
YOLOv7的yaml配置文件
首先增加以下yolov7_swin_transfomrer.yaml文件
# YOLOv7 ?, GPL-3.0 license# parametersnc: 80 # number of classesdepth_multiple: 0.33 # model depth multiplewidth_multiple: 1.0 # layer channel multiple# anchorsanchors: - [12,16, 19,36, 40,28] # P3/8 - [36,75, 76,55, 72,146] # P4/16 - [142,110, 192,243, 459,401] # P5/32# yolov7 backbone by yoloairbackbone: # [from, number, module, args] [[-1, 1, Conv, [32, 3, 1]], # 0 [-1, 1, Conv, [64, 3, 2]], # 1-P1/2 [-1, 1, Conv, [64, 3, 1]], [-1, 1, Conv, [128, 3, 2]], # 3-P2/4 [-1, 1, SwinV2_CSPB, [128, 128]], [-1, 1, Conv, [256, 3, 2]], [-1, 1, MP, []], [-1, 1, Conv, [128, 1, 1]], [-3, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [128, 3, 2]], [[-1, -3], 1, Concat, [1]], # 16-P3/8 [-1, 1, Conv, [128, 1, 1]], [-2, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [-1, 1, Conv, [128, 3, 1]], [[-1, -3, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [512, 1, 1]], [-1, 1, MP, []], [-1, 1, Conv, [256, 1, 1]], [-3, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 2]], [[-1, -3], 1, Concat, [1]], [-1, 1, Conv, [256, 1, 1]], [-2, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [-1, 1, Conv, [256, 3, 1]], [[-1, -3, -5, -6], 1, Concat, [1]], [-1, 1, Conv, [1024, 1, 1]], [-1, 1, MP, []], [-1, 1, Conv, [512, 1, 1]], [-3, 1, Conv, [512, 1, 1]], [-1, 1, Conv, [512, 3, 2]], [[-1, -3], 1, Concat, [1]], [-1, 1, SwinV2_CSPB, [1024, 1024]], [-1, 1, Conv, [256, 3, 1]], ]# yolov7 head by yoloairhead: [[-1, 1, SPPCSPC, [512]], [-1, 1, Conv, [256, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [31, 1, Conv, [256, 1, 1]], [[-1, -2], 1, Concat, [1]], [-1, 1, C3STR, [128]], [-1, 1, Conv, [128, 1, 1]], [-1, 1, nn.Upsample, [None, 2, 'nearest']], [18, 1, Conv, [128, 1, 1]], [[-1, -2], 1, Concat, [1]], [-1, 1, C3STR, [128]], [-1, 1, MP, []], [-1, 1, Conv, [128, 1, 1]], [-3, 1, Conv, [128, 1, 1]], [-1, 1, Conv, [128, 3, 2]], [[-1, -3, 44], 1, Concat, [1]], [-1, 1, C3STR, [256]], [-1, 1, MP, []], [-1, 1, Conv, [256, 1, 1]], [-3, 1, Conv, [256, 1, 1]], [-1, 1, Conv, [256, 3, 2]], [[-1, -3, 39], 1, Concat, [1]], [-1, 3, C3STR, [512]],# 检测头 ----------------------------- [49, 1, RepConv, [256, 3, 1]], [55, 1, RepConv, [512, 3, 1]], [61, 1, RepConv, [1024, 3, 1]], [[62,63,64], 1, IDetect, [nc, anchors]], # Detect(P3, P4, P5) ]common.py配置
在./models/common.py文件中增加以下模块,直接复制即可
class WindowAttention_v2(nn.Module): def __init__(self, dim, window_size, num_heads, qkv_bias=True, attn_drop=0., proj_drop=0., pretrained_window_size=[0, 0]): super().__init__() self.dim = dim self.window_size = window_size # Wh, Ww self.pretrained_window_size = pretrained_window_size self.num_heads = num_heads self.logit_scale = nn.Parameter(torch.log(10 * torch.ones((num_heads, 1, 1))), requires_grad=True) # mlp to generate continuous relative position bias self.cpb_mlp = nn.Sequential(nn.Linear(2, 512, bias=True), nn.ReLU(inplace=True), nn.Linear(512, num_heads, bias=False)) # get relative_coords_table relative_coords_h = torch.arange(-(self.window_size[0] - 1), self.window_size[0], dtype=torch.float32) relative_coords_w = torch.arange(-(self.window_size[1] - 1), self.window_size[1], dtype=torch.float32) relative_coords_table = torch.stack( torch.meshgrid([relative_coords_h, relative_coords_w])).permute(1, 2, 0).contiguous().unsqueeze(0) # 1, 2*Wh-1, 2*Ww-1, 2 if pretrained_window_size[0] > 0: relative_coords_table[:, :, :, 0] /= (pretrained_window_size[0] - 1) relative_coords_table[:, :, :, 1] /= (pretrained_window_size[1] - 1) else: relative_coords_table[:, :, :, 0] /= (self.window_size[0] - 1) relative_coords_table[:, :, :, 1] /= (self.window_size[1] - 1) relative_coords_table *= 8 # normalize to -8, 8 relative_coords_table = torch.sign(relative_coords_table) * torch.log2( torch.abs(relative_coords_table) + 1.0) / np.log2(8) self.register_buffer("relative_coords_table", relative_coords_table) # get pair-wise relative position index for each token inside the window coords_h = torch.arange(self.window_size[0]) coords_w = torch.arange(self.window_size[1]) coords = torch.stack(torch.meshgrid([coords_h, coords_w])) # 2, Wh, Ww coords_flatten = torch.flatten(coords, 1) # 2, Wh*Ww relative_coords = coords_flatten[:, :, None] - coords_flatten[:, None, :] # 2, Wh*Ww, Wh*Ww relative_coords = relative_coords.permute(1, 2, 0).contiguous() # Wh*Ww, Wh*Ww, 2 relative_coords[:, :, 0] += self.window_size[0] - 1 # shift to start from 0 relative_coords[:, :, 1] += self.window_size[1] - 1 relative_coords[:, :, 0] *= 2 * self.window_size[1] - 1 relative_position_index = relative_coords.sum(-1) # Wh*Ww, Wh*Ww self.register_buffer("relative_position_index", relative_position_index) self.qkv = nn.Linear(dim, dim * 3, bias=False) if qkv_bias: self.q_bias = nn.Parameter(torch.zeros(dim)) self.v_bias = nn.Parameter(torch.zeros(dim)) else: self.q_bias = None self.v_bias = None self.attn_drop = nn.Dropout(attn_drop) self.proj = nn.Linear(dim, dim) self.proj_drop = nn.Dropout(proj_drop) self.softmax = nn.Softmax(dim=-1) def forward(self, x, mask=None): B_, N, C = x.shape qkv_bias = None if self.q_bias is not None: qkv_bias = torch.cat((self.q_bias, torch.zeros_like(self.v_bias, requires_grad=False), self.v_bias)) qkv = F.linear(input=x, weight=self.qkv.weight, bias=qkv_bias) qkv = qkv.reshape(B_, N, 3, self.num_heads, -1).permute(2, 0, 3, 1, 4) q, k, v = qkv[0], qkv[1], qkv[2] # make torchscript happy (cannot use tensor as tuple) # cosine attention attn = (F.normalize(q, dim=-1) @ F.normalize(k, dim=-1).transpose(-2, -1)) logit_scale = torch.clamp(self.logit_scale, max=torch.log(torch.tensor(1. / 0.01))).exp() attn = attn * logit_scale relative_position_bias_table = self.cpb_mlp(self.relative_coords_table).view(-1, self.num_heads) relative_position_bias = relative_position_bias_table[self.relative_position_index.view(-1)].view( self.window_size[0] * self.window_size[1], self.window_size[0] * self.window_size[1], -1) # Wh*Ww,Wh*Ww,nH relative_position_bias = relative_position_bias.permute(2, 0, 1).contiguous() # nH, Wh*Ww, Wh*Ww relative_position_bias = 16 * torch.sigmoid(relative_position_bias) attn = attn + relative_position_bias.unsqueeze(0) if mask is not None: nW = mask.shape[0] attn = attn.view(B_ // nW, nW, self.num_heads, N, N) + mask.unsqueeze(1).unsqueeze(0) attn = attn.view(-1, self.num_heads, N, N) attn = self.softmax(attn) else: attn = self.softmax(attn) attn = self.attn_drop(attn) try: x = (attn @ v).transpose(1, 2).reshape(B_, N, C) except: x = (attn.half() @ v).transpose(1, 2).reshape(B_, N, C) x = self.proj(x) x = self.proj_drop(x) return x def extra_repr(self) -> str: return f'dim={self.dim}, window_size={self.window_size}, ' \ f'pretrained_window_size={self.pretrained_window_size}, num_heads={self.num_heads}' def flops(self, N): # calculate flops for 1 window with token length of N flops = 0 # qkv = self.qkv(x) flops += N * self.dim * 3 * self.dim # attn = (q @ k.transpose(-2, -1)) flops += self.num_heads * N * (self.dim // self.num_heads) * N # x = (attn @ v) flops += self.num_heads * N * N * (self.dim // self.num_heads) # x = self.proj(x) flops += N * self.dim * self.dim return flops class Mlp_v2(nn.Module): def __init__(self, in_features, hidden_features=None, out_features=None, act_layer=nn.SiLU, drop=0.): super().__init__() out_features = out_features or in_features hidden_features = hidden_features or in_features self.fc1 = nn.Linear(in_features, hidden_features) self.act = act_layer() self.fc2 = nn.Linear(hidden_features, out_features) self.drop = nn.Dropout(drop) def forward(self, x): x = self.fc1(x) x = self.act(x) x = self.drop(x) x = self.fc2(x) x = self.drop(x) return x# add 2 functionsclass SwinTransformerLayer_v2(nn.Module): def __init__(self, dim, num_heads, window_size=7, shift_size=0, mlp_ratio=4., qkv_bias=True, drop=0., attn_drop=0., drop_path=0., act_layer=nn.SiLU, norm_layer=nn.LayerNorm, pretrained_window_size=0): super().__init__() self.dim = dim #self.input_resolution = input_resolution self.num_heads = num_heads self.window_size = window_size self.shift_size = shift_size self.mlp_ratio = mlp_ratio #if min(self.input_resolution) <= self.window_size: # # if window size is larger than input resolution, we don't partition windows # self.shift_size = 0 # self.window_size = min(self.input_resolution) assert 0 <= self.shift_size < self.window_size, "shift_size must in 0-window_size" self.norm1 = norm_layer(dim) self.attn = WindowAttention_v2( dim, window_size=(self.window_size, self.window_size), num_heads=num_heads, qkv_bias=qkv_bias, attn_drop=attn_drop, proj_drop=drop, pretrained_window_size=(pretrained_window_size, pretrained_window_size)) self.drop_path = DropPath(drop_path) if drop_path > 0. else nn.Identity() self.norm2 = norm_layer(dim) mlp_hidden_dim = int(dim * mlp_ratio) self.mlp = Mlp_v2(in_features=dim, hidden_features=mlp_hidden_dim, act_layer=act_layer, drop=drop) def create_mask(self, H, W): # calculate attention mask for SW-MSA img_mask = torch.zeros((1, H, W, 1)) # 1 H W 1 h_slices = (slice(0, -self.window_size), slice(-self.window_size, -self.shift_size), slice(-self.shift_size, None)) w_slices = (slice(0, -self.window_size), slice(-self.window_size, -self.shift_size), slice(-self.shift_size, None)) cnt = 0 for h in h_slices: for w in w_slices: img_mask[:, h, w, :] = cnt cnt += 1 mask_windows = window_partition(img_mask, self.window_size) # nW, window_size, window_size, 1 mask_windows = mask_windows.view(-1, self.window_size * self.window_size) attn_mask = mask_windows.unsqueeze(1) - mask_windows.unsqueeze(2) attn_mask = attn_mask.masked_fill(attn_mask != 0, float(-100.0)).masked_fill(attn_mask == 0, float(0.0)) return attn_mask def forward(self, x): # reshape x[b c h w] to x[b l c] _, _, H_, W_ = x.shape Padding = False if min(H_, W_) < self.window_size or H_ % self.window_size!=0 or W_ % self.window_size!=0: Padding = True # print(f'img_size {min(H_, W_)} is less than (or not divided by) window_size {self.window_size}, Padding.') pad_r = (self.window_size - W_ % self.window_size) % self.window_size pad_b = (self.window_size - H_ % self.window_size) % self.window_size x = F.pad(x, (0, pad_r, 0, pad_b)) # print('2', x.shape) B, C, H, W = x.shape L = H * W x = x.permute(0, 2, 3, 1).contiguous().view(B, L, C) # b, L, c # create mask from init to forward if self.shift_size > 0: attn_mask = self.create_mask(H, W).to(x.device) else: attn_mask = None shortcut = x x = x.view(B, H, W, C) # cyclic shift if self.shift_size > 0: shifted_x = torch.roll(x, shifts=(-self.shift_size, -self.shift_size), dims=(1, 2)) else: shifted_x = x # partition windows x_windows = window_partition_v2(shifted_x, self.window_size) # nW*B, window_size, window_size, C x_windows = x_windows.view(-1, self.window_size * self.window_size, C) # nW*B, window_size*window_size, C # W-MSA/SW-MSA attn_windows = self.attn(x_windows, mask=attn_mask) # nW*B, window_size*window_size, C # merge windows attn_windows = attn_windows.view(-1, self.window_size, self.window_size, C) shifted_x = window_reverse_v2(attn_windows, self.window_size, H, W) # B H' W' C # reverse cyclic shift if self.shift_size > 0: x = torch.roll(shifted_x, shifts=(self.shift_size, self.shift_size), dims=(1, 2)) else: x = shifted_x x = x.view(B, H * W, C) x = shortcut + self.drop_path(self.norm1(x)) # FFN x = x + self.drop_path(self.norm2(self.mlp(x))) x = x.permute(0, 2, 1).contiguous().view(-1, C, H, W) # b c h w if Padding: x = x[:, :, :H_, :W_] # reverse padding return x def extra_repr(self) -> str: return f"dim={self.dim}, input_resolution={self.input_resolution}, num_heads={self.num_heads}, " \ f"window_size={self.window_size}, shift_size={self.shift_size}, mlp_ratio={self.mlp_ratio}" def flops(self): flops = 0 H, W = self.input_resolution # norm1 flops += self.dim * H * W # W-MSA/SW-MSA nW = H * W / self.window_size / self.window_size flops += nW * self.attn.flops(self.window_size * self.window_size) # mlp flops += 2 * H * W * self.dim * self.dim * self.mlp_ratio # norm2 flops += self.dim * H * W return flopsclass SwinTransformer2Block(nn.Module): def __init__(self, c1, c2, num_heads, num_layers, window_size=7): super().__init__() self.conv = None if c1 != c2: self.conv = Conv(c1, c2) # remove input_resolution self.blocks = nn.Sequential(*[SwinTransformerLayer_v2(dim=c2, num_heads=num_heads, window_size=window_size, shift_size=0 if (i % 2 == 0) else window_size // 2) for i in range(num_layers)]) def forward(self, x): if self.conv is not None: x = self.conv(x) x = self.blocks(x) return xclass SwinV2_CSPB(nn.Module): # CSP Bottleneck https://github.com/WongKinYiu/CrossStagePartialNetworks def __init__(self, c1, c2, n=1, shortcut=False, g=1, e=0.5): # ch_in, ch_out, number, shortcut, groups, expansion super(SwinV2_CSPB, self).__init__() c_ = int(c2) # hidden channels self.cv1 = Conv(c1, c_, 1, 1) self.cv2 = Conv(c_, c_, 1, 1) self.cv3 = Conv(2 * c_, c2, 1, 1) num_heads = c_ // 32 self.m = SwinTransformer2Block(c_, c_, num_heads, n) #self.m = nn.Sequential(*[Bottleneck(c_, c_, shortcut, g, e=1.0) for _ in range(n)]) def forward(self, x): x1 = self.cv1(x) y1 = self.m(x1) y2 = self.cv2(x1) return self.cv3(torch.cat((y1, y2), dim=1))训练yolov7_swin_transfomrer-V2模型
python train.py --cfg yolov7_swin_transfomrer-V2.yaml