文章目录
准备配置测试程序颜色识别跟踪人脸识别手势识别形状识别条码识别二维码识别 故障问题解决module 'cv2' has no attribute 'dnn'ImportError: numpy.core.multiarray failed to import1121: error: (-2:Unspecified error) FAILED: fs.is_open(). Can't open
准备
树莓派4BUSB免驱摄像头配置
安装python-opencv,参考:https://blog.csdn.net/weixin_45911959/article/details/122709090
安装numpy,pip3 install -U numpy
安装opencv-python,opencv-contrib-python,参考:https://blog.csdn.net/weixin_57605235/article/details/121512923
测试
图片:
import cv2a=cv2.imread("/home/pi/2020-06-15-162551_1920x1080_scrot.png")cv2.imshow("test",a)cv2.waitKey()cv2.destroyAllWindows()视频:
import cv2cap = cv2.VideoCapture(0)while True: ret, frame = cap.read() cv2.imshow('frame', frame) # 这一步必须有,否则图像无法显示 if cv2.waitKey(1) & 0xFF == ord('q'): break#当一切完成时,释放捕获cap.release()cv2.destroyAllWindows()程序
颜色识别跟踪
import sysimport cv2import mathimport timeimport threadingimport numpy as npimport HiwonderSDK.yaml_handle as yaml_handleif sys.version_info.major == 2: print('Please run this program with python3!') sys.exit(0)range_rgb = { 'red': (0, 0, 255), 'blue': (255, 0, 0), 'green': (0, 255, 0), 'black': (0, 0, 0), 'white': (255, 255, 255)}__target_color = ('red', 'green', 'blue')lab_data = yaml_handle.get_yaml_data(yaml_handle.lab_file_path) # 找出面积最大的轮廓# 参数为要比较的轮廓的列表def getAreaMaxContour(contours): contour_area_temp = 0 contour_area_max = 0 area_max_contour = None for c in contours: # 历遍所有轮廓 contour_area_temp = math.fabs(cv2.contourArea(c)) # 计算轮廓面积 if contour_area_temp > contour_area_max: contour_area_max = contour_area_temp if contour_area_temp > 300: # 只有在面积大于300时,最大面积的轮廓才是有效的,以过滤干扰 area_max_contour = c return area_max_contour, contour_area_max # 返回最大的轮廓detect_color = Nonecolor_list = []start_pick_up = Falsesize = (640, 480)def run(img): global rect global detect_color global start_pick_up global color_list img_copy = img.copy() frame_resize = cv2.resize(img_copy, size, interpolation=cv2.INTER_NEAREST) frame_gb = cv2.GaussianBlur(frame_resize, (3, 3), 3) frame_lab = cv2.cvtColor(frame_gb, cv2.COLOR_BGR2LAB) # 将图像转换到LAB空间 color_area_max = None max_area = 0 areaMaxContour_max = 0 if not start_pick_up: for i in lab_data: if i in __target_color: frame_mask = cv2.inRange(frame_lab, (lab_data[i]['min'][0], lab_data[i]['min'][1], lab_data[i]['min'][2]), (lab_data[i]['max'][0], lab_data[i]['max'][1], lab_data[i]['max'][2])) #对原图像和掩模进行位运算 opened = cv2.morphologyEx(frame_mask, cv2.MORPH_OPEN, np.ones((3, 3), np.uint8)) # 开运算 closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, np.ones((3, 3), np.uint8)) # 闭运算 contours = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] # 找出轮廓 areaMaxContour, area_max = getAreaMaxContour(contours) # 找出最大轮廓 if areaMaxContour is not None: if area_max > max_area: # 找最大面积 max_area = area_max color_area_max = i areaMaxContour_max = areaMaxContour if max_area > 500: # 有找到最大面积 rect = cv2.minAreaRect(areaMaxContour_max) box = np.int0(cv2.boxPoints(rect)) y = int((box[1][0]-box[0][0])/2+box[0][0]) x = int((box[2][1]-box[0][1])/2+box[0][1]) print('X:',x,'Y:',y) #打印坐标 cv2.drawContours(img, [box], -1, range_rgb[color_area_max], 2) if not start_pick_up: if color_area_max == 'red': # 红色最大 color = 1 elif color_area_max == 'green': # 绿色最大 color = 2 elif color_area_max == 'blue': # 蓝色最大 color = 3 else: color = 0 color_list.append(color) if len(color_list) == 3: # 多次判断 # 取平均值 color = int(round(np.mean(np.array(color_list)))) color_list = [] if color == 1: detect_color = 'red' elif color == 2: detect_color = 'green' elif color == 3: detect_color = 'blue' else: detect_color = 'None'## cv2.putText(img, "Color: " + detect_color, (10, img.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.65, detect_color, 2) return imgif __name__ == '__main__': cap = cv2.VideoCapture(-1) #读取摄像头 __target_color = ('red',) while True: ret, img = cap.read() if ret: frame = img.copy() Frame = run(frame) cv2.imshow('Frame', Frame) key = cv2.waitKey(1) if key == 27: break else: time.sleep(0.01) cv2.destroyAllWindows()效果: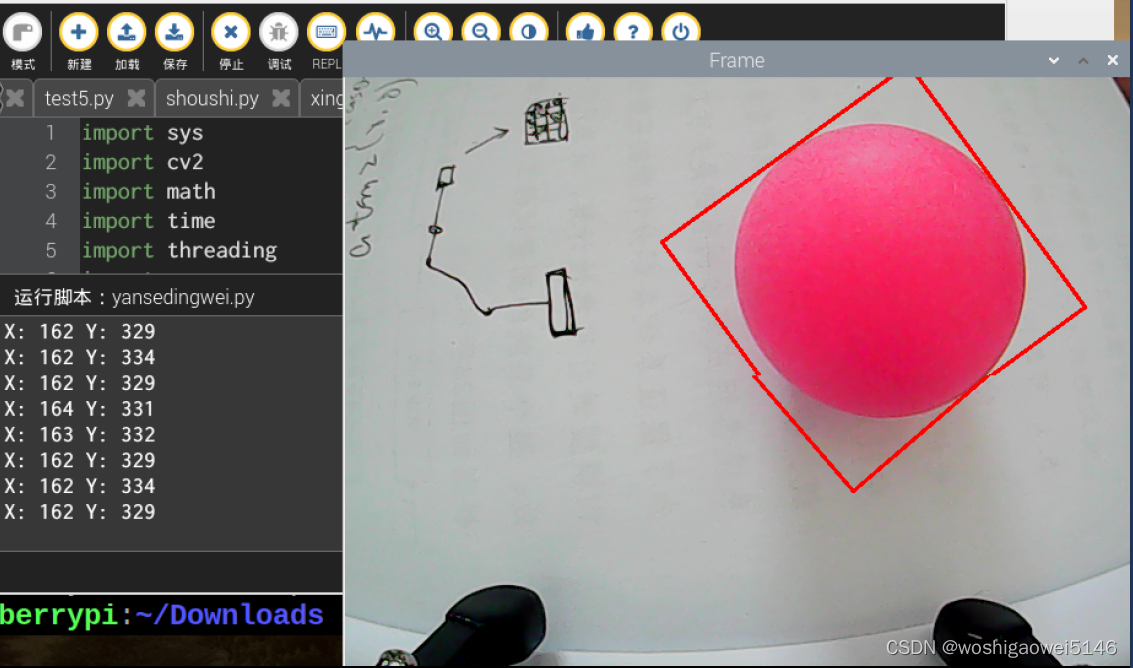
人脸识别
利用了Caffe训练的人脸数据集。
import sysimport numpy as npimport cv2import mathimport timeimport threading# 人脸检测if sys.version_info.major == 2: print('Please run this program with python3!') sys.exit(0)# 阈值conf_threshold = 0.6# 模型位置modelFile = "/home/pi/mu_code/models/res10_300x300_ssd_iter_140000_fp16.caffemodel"configFile = "/home/pi/mu_code/models/deploy.prototxt"net = cv2.dnn.readNetFromCaffe(configFile, modelFile)frame_pass = Truex1=x2=y1=y2 = 0old_time = 0def run(img): global old_time global frame_pass global x1,x2,y1,y2 if not frame_pass: frame_pass = True cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2, 8) x1=x2=y1=y2 = 0 return img else: frame_pass = False img_copy = img.copy() img_h, img_w = img.shape[:2] blob = cv2.dnn.blobFromImage(img_copy, 1, (100, 100), [104, 117, 123], False, False) net.setInput(blob) detections = net.forward() #计算识别 for i in range(detections.shape[2]): confidence = detections[0, 0, i, 2] if confidence > conf_threshold: #识别到的人了的各个坐标转换会未缩放前的坐标 x1 = int(detections[0, 0, i, 3] * img_w) y1 = int(detections[0, 0, i, 4] * img_h) x2 = int(detections[0, 0, i, 5] * img_w) y2 = int(detections[0, 0, i, 6] * img_h) cv2.rectangle(img, (x1, y1), (x2, y2), (0, 255, 0), 2, 8) #将识别到的人脸框出 X = (x1 + x2)/2 Y = (y1 + y2)/2 print('X:',X,'Y:',Y) return imgif __name__ == '__main__': cap = cv2.VideoCapture(-1) #读取摄像头 while True: ret, img = cap.read() if ret: frame = img.copy() Frame = run(frame) cv2.imshow('Frame', Frame) key = cv2.waitKey(1) if key == 27: break else: time.sleep(0.01) cv2.destroyAllWindows()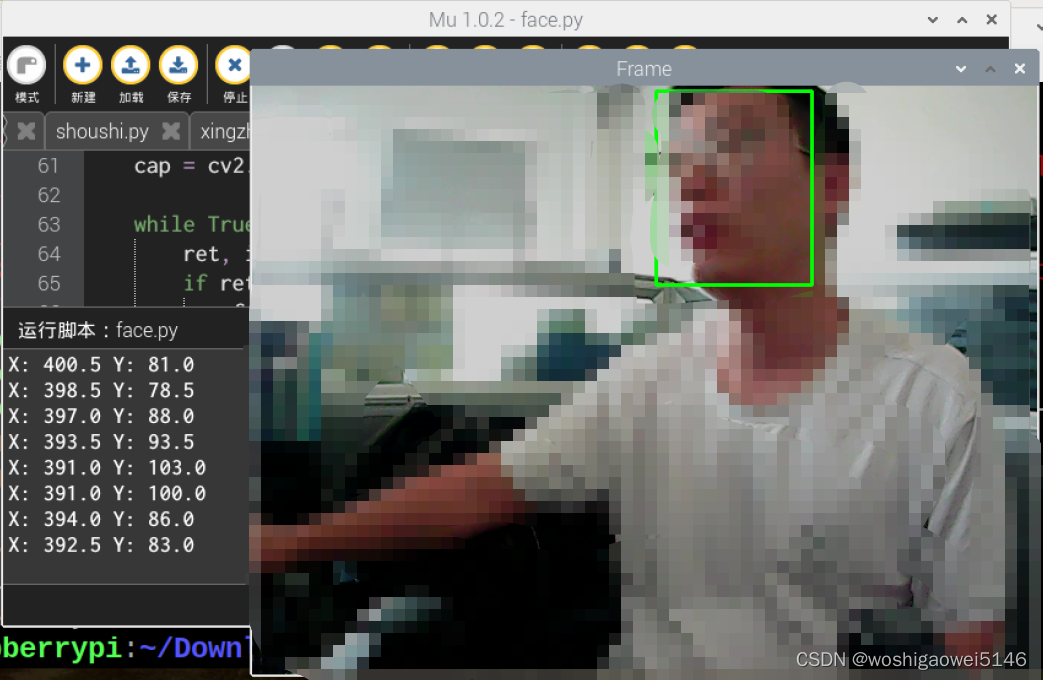
手势识别
import osimport sysimport cv2import mathimport timeimport numpy as npimport HiwonderSDK.Misc as Miscif sys.version_info.major == 2: print('Please run this program with python3!') sys.exit(0)__finger = 0__t1 = 0__step = 0__count = 0__get_finger = False# 初始位置def initMove(): passdef reset(): global __finger, __t1, __step, __count, __get_finger __finger = 0 __t1 = 0 __step = 0 __count = 0 __get_finger = False def init(): reset() initMove()class Point(object): # 一个坐标点 x = 0 y = 0 def __init__(self, x=0, y=0): self.x = x self.y = yclass Line(object): # 一条线 def __init__(self, p1, p2): self.p1 = p1 self.p2 = p2def GetCrossAngle(l1, l2): ''' 求两直线之间的夹角 :param l1: :param l2: :return: ''' arr_0 = np.array([(l1.p2.x - l1.p1.x), (l1.p2.y - l1.p1.y)]) arr_1 = np.array([(l2.p2.x - l2.p1.x), (l2.p2.y - l2.p1.y)]) cos_value = (float(arr_0.dot(arr_1)) / (np.sqrt(arr_0.dot(arr_0)) * np.sqrt(arr_1.dot(arr_1)))) # 注意转成浮点数运算 return np.arccos(cos_value) * (180/np.pi)def distance(start, end): """ 计算两点的距离 :param start: 开始点 :param end: 结束点 :return: 返回两点之间的距离 """ s_x, s_y = start e_x, e_y = end x = s_x - e_x y = s_y - e_y return math.sqrt((x**2)+(y**2))def image_process(image, rw, rh): # hsv ''' # 光线影响,请修改 cb的范围 # 正常黄种人的Cr分量大约在140~160之间 识别肤色 :param image: 图像 :return: 识别后的二值图像 ''' frame_resize = cv2.resize(image, (rw, rh), interpolation=cv2.INTER_CUBIC) YUV = cv2.cvtColor(frame_resize, cv2.COLOR_BGR2YCR_CB) # 将图片转化为YCrCb _, Cr, _ = cv2.split(YUV) # 分割YCrCb Cr = cv2.GaussianBlur(Cr, (5, 5), 0) _, Cr = cv2.threshold(Cr, 135, 160, cv2.THRESH_BINARY + cv2.THRESH_OTSU) # OTSU 二值化 # 开运算,去除噪点 open_element = cv2.getStructuringElement(cv2.MORPH_RECT, (5, 5)) opend = cv2.morphologyEx(Cr, cv2.MORPH_OPEN, open_element) # 腐蚀 kernel = np.ones((3, 3), np.uint8) erosion = cv2.erode(opend, kernel, iterations=3) return erosiondef get_defects_far(defects, contours, img): ''' 获取凸包中最远的点 ''' if defects is None and contours is None: return None far_list = [] for i in range(defects.shape[0]): s, e, f, d = defects[i, 0] start = tuple(contours[s][0]) end = tuple(contours[e][0]) far = tuple(contours[f][0]) # 求两点之间的距离 a = distance(start, end) b = distance(start, far) c = distance(end, far) # 求出手指之间的角度 angle = math.acos((b ** 2 + c ** 2 - a ** 2) / (2 * b * c)) * 180 / math.pi # 手指之间的角度一般不会大于100度 # 小于90度 if angle <= 75: # 90: # cv.circle(img, far, 10, [0, 0, 255], 1) far_list.append(far) return far_listdef get_max_coutour(cou, max_area): ''' 找出最大的轮廓 根据面积来计算,找到最大后,判断是否小于最小面积,如果小于侧放弃 :param cou: 轮廓 :return: 返回最大轮廓 ''' max_coutours = 0 r_c = None if len(cou) < 1: return None else: for c in cou: # 计算面积 temp_coutours = math.fabs(cv2.contourArea(c)) if temp_coutours > max_coutours: max_coutours = temp_coutours cc = c # 判断所有轮廓中最大的面积 if max_coutours > max_area: r_c = cc return r_cdef find_contours(binary, max_area): ''' CV_RETR_EXTERNAL - 只提取最外层的轮廓 CV_RETR_LIST - 提取所有轮廓,并且放置在 list 中 CV_RETR_CCOMP - 提取所有轮廓,并且将其组织为两层的 hierarchy: 顶层为连通域的外围边界,次层为洞的内层边界。 CV_RETR_TREE - 提取所有轮廓,并且重构嵌套轮廓的全部 hierarchy method 逼近方法 (对所有节点, 不包括使用内部逼近的 CV_RETR_RUNS). CV_CHAIN_CODE - Freeman 链码的输出轮廓. 其它方法输出多边形(定点序列). CV_CHAIN_APPROX_NONE - 将所有点由链码形式翻译(转化)为点序列形式 CV_CHAIN_APPROX_SIMPLE - 压缩水平、垂直和对角分割,即函数只保留末端的象素点; CV_CHAIN_APPROX_TC89_L1, CV_CHAIN_APPROX_TC89_KCOS - 应用 Teh-Chin 链逼近算法. CV_LINK_RUNS - 通过连接为 1 的水平碎片使用完全不同的轮廓提取算法 :param binary: 传入的二值图像 :return: 返回最大轮廓 ''' # 找出所有轮廓 contours = cv2.findContours( binary, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] # 返回最大轮廓 return get_max_coutour(contours, max_area)def get_hand_number(binary_image, contours, rw, rh, rgb_image): ''' :param binary_image: :param rgb_image: :return: ''' # # 2、找出手指尖的位置 # # 查找轮廓,返回最大轮廓 x = 0 y = 0 coord_list = [] new_hand_list = [] # 获取最终的手指间坐标 if contours is not None: # 周长 0.035 根据识别情况修改,识别越好,越小 epsilon = 0.020 * cv2.arcLength(contours, True) # 轮廓相似 approx = cv2.approxPolyDP(contours, epsilon, True) # cv2.approxPolyDP()的参数2(epsilon)是一个距离值,表示多边形的轮廓接近实际轮廓的程度,值越小,越精确;参数3表示是否闭合 # cv2.polylines(rgb_image, [approx], True, (0, 255, 0), 1)#画多边形 if approx.shape[0] >= 3: # 有三个点以上#多边形最小为三角形,三角形需要三个点 approx_list = [] for j in range(approx.shape[0]): # 将多边形所有的点储存在一个列表里 # cv2.circle(rgb_image, (approx[j][0][0],approx[j][0][1]), 5, [255, 0, 0], -1) approx_list.append(approx[j][0]) approx_list.append(approx[0][0]) # 在末尾添加第一个点 approx_list.append(approx[1][0]) # 在末尾添加第二个点 for i in range(1, len(approx_list) - 1): p1 = Point(approx_list[i - 1][0], approx_list[i - 1][1]) # 声明一个点 p2 = Point(approx_list[i][0], approx_list[i][1]) p3 = Point(approx_list[i + 1][0], approx_list[i + 1][1]) line1 = Line(p1, p2) # 声明一条直线 line2 = Line(p2, p3) angle = GetCrossAngle(line1, line2) # 获取两条直线的夹角 angle = 180 - angle # # print angle if angle < 42: # 求出两线相交的角度,并小于37度的 #cv2.circle(rgb_image, tuple(approx_list[i]), 5, [255, 0, 0], -1) coord_list.append(tuple(approx_list[i])) ############################################################################## # 去除手指间的点 # 1、获取凸包缺陷点,最远点点 #cv2.drawContours(rgb_image, contours, -1, (255, 0, 0), 1) try: hull = cv2.convexHull(contours, returnPoints=False) # 找凸包缺陷点 。返回的数据, 【起点,终点, 最远的点, 到最远点的近似距离】 defects = cv2.convexityDefects(contours, hull) # 返回手指间的点 hand_coord = get_defects_far(defects, contours, rgb_image) except: return rgb_image, 0 # 2、从coord_list 去除最远点 alike_flag = False if len(coord_list) > 0: for l in range(len(coord_list)): for k in range(len(hand_coord)): if (-10 <= coord_list[l][0] - hand_coord[k][0] <= 10 and -10 <= coord_list[l][1] - hand_coord[k][1] <= 10): # 最比较X,Y轴, 相近的去除 alike_flag = True break # if alike_flag is False: new_hand_list.append(coord_list[l]) alike_flag = False # 获取指尖的坐标列表并显示 for i in new_hand_list: j = list(tuple(i)) j[0] = int(Misc.map(j[0], 0, rw, 0, 640)) j[1] = int(Misc.map(j[1], 0, rh, 0, 480)) cv2.circle(rgb_image, (j[0], j[1]), 20, [0, 255, 255], -1) fingers = len(new_hand_list) return rgb_image, fingersdef run(img, debug=False): global __act_map, __get_finger global __step, __count, __finger binary = image_process(img, 320, 240) contours = find_contours(binary, 3000) img, finger = get_hand_number(binary, contours, 320, 240, img) if not __get_finger: if finger == __finger: __count += 1 else: __count = 0 __finger = finger cv2.putText(img, "Finger(s):%d" % __finger, (50, 480 - 30), cv2.FONT_HERSHEY_SIMPLEX, 1.2, (0, 255, 255), 2)#将识别到的手指个数写在图片上 return img if __name__ == '__main__': init() cap = cv2.VideoCapture(-1) #读取摄像头 while True: ret, img = cap.read() if ret: frame = img.copy() Frame = run(frame) frame_resize = cv2.resize(Frame, (320, 240)) cv2.imshow('frame', frame_resize) key = cv2.waitKey(1) if key == 27: break else: time.sleep(0.01) cv2.destroyAllWindows()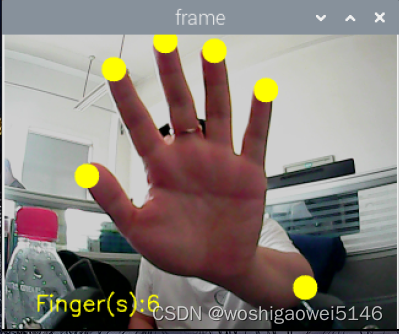
形状识别
import sysimport cv2import mathimport timeimport threadingimport numpy as npimport HiwonderSDK.tm1640 as tmimport RPi.GPIO as GPIOGPIO.setwarnings(False)GPIO.setmode(GPIO.BCM)color_range = {'red': [(0, 101, 177), (255, 255, 255)], 'green': [(47, 0, 135), (255, 119, 255)], 'blue': [(0, 0, 0), (255, 255, 115)], 'black': [(0, 0, 0), (41, 255, 136)], 'white': [(193, 0, 0), (255, 250, 255)], }if sys.version_info.major == 2: print('Please run this program with python3!') sys.exit(0) range_rgb = { 'red': (0, 0, 255), 'blue': (255, 0, 0), 'green': (0, 255, 0), 'black': (0, 0, 0), 'white': (255, 255, 255),}# 找出面积最大的轮廓# 参数为要比较的轮廓的列表def getAreaMaxContour(contours): contour_area_temp = 0 contour_area_max = 0 area_max_contour = None for c in contours: # 历遍所有轮廓 contour_area_temp = math.fabs(cv2.contourArea(c)) # 计算轮廓面积 if contour_area_temp > contour_area_max: contour_area_max = contour_area_temp if contour_area_temp > 50: # 只有在面积大于50时,最大面积的轮廓才是有效的,以过滤干扰 area_max_contour = c return area_max_contour, contour_area_max # 返回最大的轮廓shape_length = 0def move(): global shape_length while True: if shape_length == 3: print('三角形') ## 显示'三角形' tm.display_buf = (0x80, 0xc0, 0xa0, 0x90, 0x88, 0x84, 0x82, 0x81, 0x81, 0x82, 0x84,0x88, 0x90, 0xa0, 0xc0, 0x80) tm.update_display() elif shape_length == 4: print('矩形') ## 显示'矩形' tm.display_buf = (0x00, 0x00, 0x00, 0x00, 0xff, 0x81, 0x81, 0x81, 0x81, 0x81, 0x81,0xff, 0x00, 0x00, 0x00, 0x00) tm.update_display() elif shape_length >= 6: print('圆') ## 显示'圆形' tm.display_buf = (0x00, 0x00, 0x00, 0x00, 0x1c, 0x22, 0x41, 0x41, 0x41, 0x22, 0x1c,0x00, 0x00, 0x00, 0x00, 0x00) tm.update_display() time.sleep(0.01) # 运行子线程th = threading.Thread(target=move)th.setDaemon(True)th.start()shape_list = []action_finish = Trueif __name__ == '__main__': cap = cv2.VideoCapture(-1) while True: ret,img = cap.read() if ret: img_copy = img.copy() img_h, img_w = img.shape[:2] frame_gb = cv2.GaussianBlur(img_copy, (3, 3), 3) frame_lab = cv2.cvtColor(frame_gb, cv2.COLOR_BGR2LAB) # 将图像转换到LAB空间 max_area = 0 color_area_max = None areaMaxContour_max = 0 if action_finish: for i in color_range: if i != 'white': frame_mask = cv2.inRange(frame_lab, color_range[i][0], color_range[i][1]) #对原图像和掩模进行位运算 opened = cv2.morphologyEx(frame_mask, cv2.MORPH_OPEN, np.ones((6,6),np.uint8)) #开运算 closed = cv2.morphologyEx(opened, cv2.MORPH_CLOSE, np.ones((6,6),np.uint8)) #闭运算 contours = cv2.findContours(closed, cv2.RETR_EXTERNAL, cv2.CHAIN_APPROX_NONE)[-2] #找出轮廓 areaMaxContour, area_max = getAreaMaxContour(contours) #找出最大轮廓 if areaMaxContour is not None: if area_max > max_area:#找最大面积 max_area = area_max color_area_max = i areaMaxContour_max = areaMaxContour if max_area > 200: cv2.drawContours(img, areaMaxContour_max, -1, (0, 0, 255), 2) # 识别形状 # 周长 0.035 根据识别情况修改,识别越好,越小 epsilon = 0.035 * cv2.arcLength(areaMaxContour_max, True) # 轮廓相似 approx = cv2.approxPolyDP(areaMaxContour_max, epsilon, True) shape_list.append(len(approx)) if len(shape_list) == 30: shape_length = int(round(np.mean(shape_list))) shape_list = [] print(shape_length) frame_resize = cv2.resize(img, (320, 240)) cv2.imshow('frame', frame_resize) key = cv2.waitKey(1) if key == 27: break else: time.sleep(0.01) my_camera.camera_close() cv2.destroyAllWindows()approxPolyDP() 函 数 用 于 将 一 个 连 续 光 滑 曲 线 折 线 化 。 以 代 码 “ approx =
cv2.approxPolyDP(areaMaxContour_max, epsilon, True)”为例,括号内的参数含义如下:
第一个参数“areaMaxContour_max”是输入的形状轮廓;
第二个参数“epsilon”是距离值,表示多边形的轮廓接近实际轮廓的程度,值越小,越精确;
第三个参数“True”表示轮廓为闭合曲线。
cv2.approxPolyDP()函数的输出为近似多边形的顶点坐标,根据顶点的数量判断形状。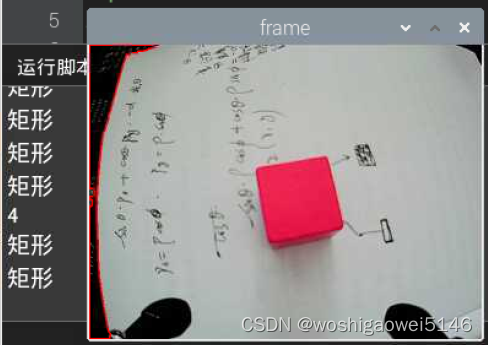
条码识别
首先安装pyzbar,pip3 install pyzbar
import cv2import sysfrom pyzbar import pyzbarif sys.version_info.major == 2: print('Please run this program with python3!') sys.exit(0)def run(image): # 找到图像中的条形码并解码每个条形码 barcodes = pyzbar.decode(image) # 循环检测到的条形码 for barcode in barcodes: # 提取条形码的边界框位置 (x, y, w, h) = barcode.rect # 绘出图像上条形码的边框 cv2.rectangle(image, (x, y), (x + w, y + h), (0, 0, 255), 2) barcodeData = barcode.data.decode("utf-8") barcodeType = barcode.type # 在图像上绘制条形码数据和条形码类型 text = "{} ({})".format(barcodeData, barcodeType) cv2.putText(image, text, (x, y - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.5, (0, 0, 255), 2) return imageif __name__ == '__main__': cap = cv2.VideoCapture(-1) #读取摄像头 while True: ret, img = cap.read() if ret: frame = img.copy() Frame = run(frame) cv2.imshow('Frame', Frame) key = cv2.waitKey(1) if key == 27: break else: time.sleep(0.01) cv2.destroyAllWindows()
二维码识别
安装apriltag,发现安装失败。还是老办法下载到本地以后安装。
在https://www.piwheels.org/simple/apriltag/,我下载了apriltag-0.0.16-cp37-cp37m-linux_armv7l.whl。
使用FileZilla传输到树莓派,打开whl文件所在的树莓派目录,安装whl文件,显示成功安装。
cd /home/pi/Downloadssudo pip3 install apriltag-0.0.16-cp37-cp37m-linux_armv7l.whl
import sysimport cv2import mathimport timeimport threadingimport numpy as npimport apriltag#apriltag检测if sys.version_info.major == 2: print('Please run this program with python3!') sys.exit(0)object_center_x = 0.0object_center_y = 0.0# 检测apriltagdetector = apriltag.Detector(searchpath=apriltag._get_demo_searchpath())def apriltagDetect(img): global object_center_x, object_center_y gray = cv2.cvtColor(img, cv2.COLOR_BGR2GRAY) detections = detector.detect(gray, return_image=False) if len(detections) != 0: for detection in detections: corners = np.rint(detection.corners) # 获取四个角点 cv2.drawContours(img, [np.array(corners, np.int)], -1, (0, 255, 255), 2) tag_family = str(detection.tag_family, encoding='utf-8') # 获取tag_family tag_id = int(detection.tag_id) # 获取tag_id object_center_x, object_center_y = int(detection.center[0]), int(detection.center[1]) # 中心点 object_angle = int(math.degrees(math.atan2(corners[0][1] - corners[1][1], corners[0][0] - corners[1][0]))) # 计算旋转角 return tag_family, tag_id return None, Nonedef run(img): global state global tag_id global action_finish global object_center_x, object_center_y img_h, img_w = img.shape[:2] tag_family, tag_id = apriltagDetect(img) # apriltag检测 if tag_id is not None: print('X:',object_center_x,'Y:',object_center_y) cv2.putText(img, "tag_id: " + str(tag_id), (10, img.shape[0] - 30), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2) cv2.putText(img, "tag_family: " + tag_family, (10, img.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2) else: cv2.putText(img, "tag_id: None", (10, img.shape[0] - 30), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2) cv2.putText(img, "tag_family: None", (10, img.shape[0] - 10), cv2.FONT_HERSHEY_SIMPLEX, 0.65, [0, 255, 255], 2) return imgif __name__ == '__main__': cap = cv2.VideoCapture(-1) #读取摄像头 while True: ret, img = cap.read() if ret: frame = img.copy() Frame = run(frame) cv2.imshow('Frame', Frame) key = cv2.waitKey(1) if key == 27: break else: time.sleep(0.01) cv2.destroyAllWindows()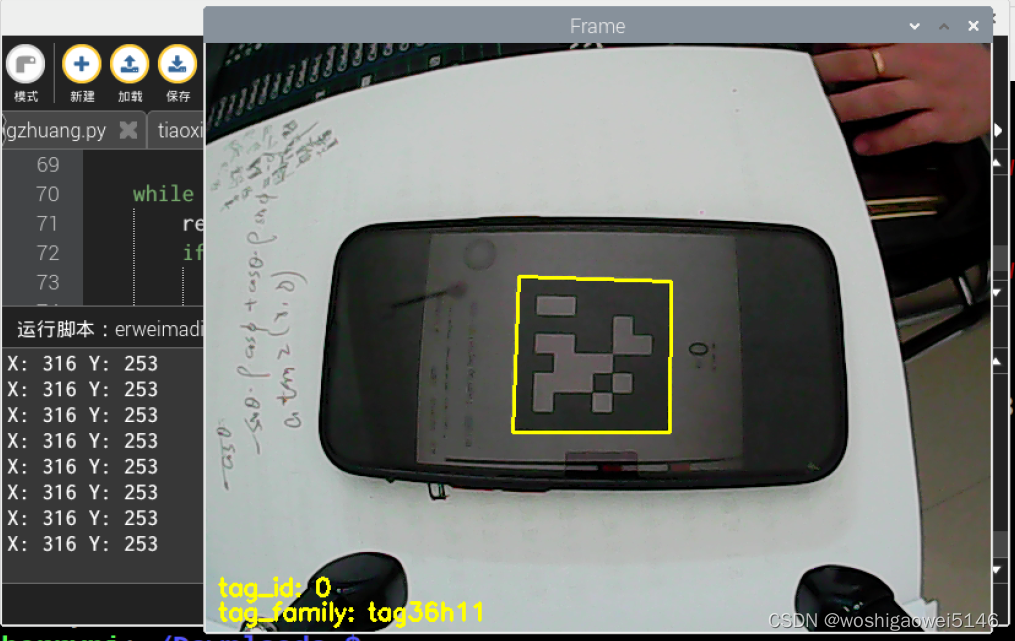
故障问题解决
module ‘cv2’ has no attribute ‘dnn’
尝试用一下指令都有问题,一直在报错,或者显示无法识别 python-opencv,更换镜像也没用:
sudo apt install python-opencv 或 sudo apt install python3-opencv sudo apt-get install opencv-pythonsudo apt-get install opencv-contrib-pythonpip install opencv-contrib-pythonpip install opencv-python最后,通过下载本地文件的方式安装成功。
首先习惯更新树莓派系统和文件
sudo apt-get update sudo apt-get upgrade 若下载速度太慢可以考虑换源。
1) 使用“ sudo nano /etc/apt/sources.list” 命令编辑 sources.list 文件,注释原文件所有内容,并追加以下内容:deb http://mirrors.aliyun.com/raspbian/raspbian/ buster main contrib non-free rpideb-src http://mirrors.aliyun.com/raspbian/raspbian/ buster main contrib non-free rpi使用 Ctrl+O 快捷键保存文件,Ctrl+X 退出文件。2)使用 “sudo nano /etc/apt/sources.list.d/raspi.list” 命令编辑 raspi.list 文件,注释原文件所有内容,并追加以下内容:deb http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster maindeb-src http://mirrors.tuna.tsinghua.edu.cn/raspbian/raspbian/ buster main使用 Ctrl+O 快捷键保存文件,Ctrl+X 退出文件。3)执行“sudo apt-get update” 命令。4) 为加速 Python pip 安装速度,特更改 Python 软件源,操作方法:打开树莓派命令行,输入下面命令:pip config set global.index-url https://pypi.tuna.tsinghua.edu.cn/simplepip install pip -U5) 最后输入指令“sudo reboot”,重新启动树莓派即可。下载whl文件并传到树莓派上,在电脑上打开 https://www.piwheels.org/simple/opencv-python/
下载与自己python版本相对的whl文件,我下载的是opencv_python-3.4.10.37-cp37-cp37m-linux_armv7l.whl
cp37表示python的版本,armv7表示处理器的架构,树莓派4B选择armv7。
将其使用FileZilla传输到树莓派,打开whl文件所在的树莓派目录,安装whl文件,显示成功安装opencv-python。
cd /home/pi/Downloadssudo pip3 install opencv_python-3.4.10.37-cp37-cp37m-linux_armv7l.whl参考:https://blog.csdn.net/weixin_57605235/article/details/121512923
ImportError: numpy.core.multiarray failed to import
先卸载低版本的numpy,再安装新版本的numpy,即
1.pip uninstall numpy2.pip install -U numpy来自 https://blog.csdn.net/qq_25603827/article/details/107824977
无效。
pip install numpy --upgrade --force来自 http://www.manongjc.com/article/38668.html
无效。
查看本地 numpy 版本:
pip show numpy而我们在安装 opencv-python 时,其对应 numpy 版本为:
所以对 numpy 进行版本降级处理即可:
pip install -U numpy==1.14.5 -i https://pypi.mirrors.ustc.edu.cn/simple/来自 https://zhuanlan.zhihu.com/p/280702247
无效。
最后,用pip3 install -U numpy 成功。所以用python3的最好还是用pip3。
网上有很多尝试方法,有升级版本的,有降级版本的,各种诡异的现象层出不穷,说法不一,参考:
https://blog.csdn.net/Robin_Pi/article/details/120544691
https://zhuanlan.zhihu.com/p/29026597
1121: error: (-2:Unspecified error) FAILED: fs.is_open(). Can’t open
找了半天发现多了个点在开头。