点击下方卡片,关注“CVer”公众号
AI/CV重磅干货,第一时间送达
Walk in the Cloud: Learning Curves for Point Clouds Shape Analysis
作者单位:悉尼大学,新南威尔士大学
项目网页:https://curvenet.github.io/
代码:https://github.com/tiangexiang/CurveNet
论文:https://arxiv.org/abs/2105.01288
导读:
点云处理一直以来是计算机视觉领域中的一项具有挑战性的任务。与传统2D图像不同,点云在3D空间中稀疏的表示,使得其很难像图像那样被提取语义特征。基于此,近年来有很多工作设计了高效的点云特征提取算子,对局部和全局的模式进行响应。然而却鲜有方法专注于捕获点云物体的形状和几何特征。隐示的几何特征表达有助于完善整个点云物体的表征,使得在下游基础任务中达到更精确的效果。
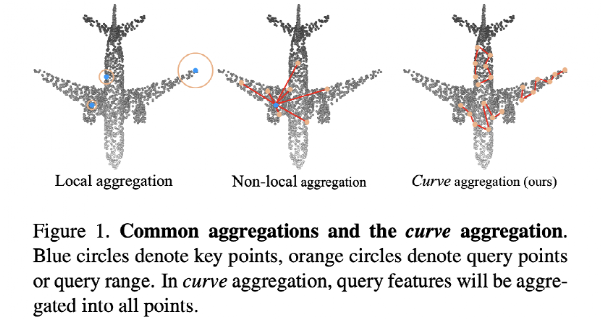
本文提出了一种长距离的点云特征提取算子,通过在与点云同构图(isomorphic graph)上进行有导向的游走(guided walk),聚集出一系列固定数量和长度的弧线(curve),来对点云整体特征补充额外的几何信息。
方法简介:
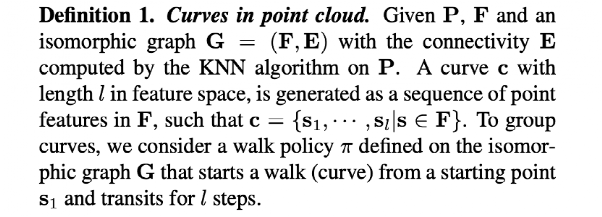
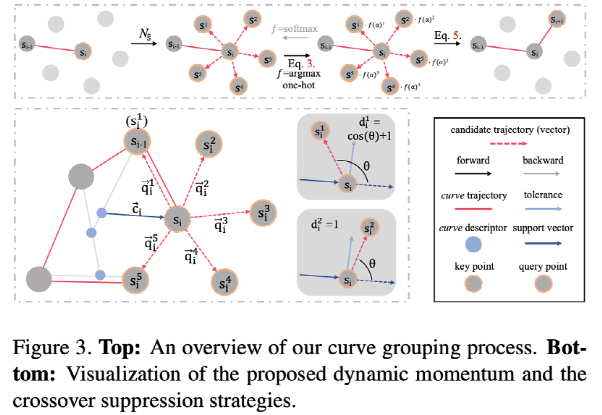
首先作者定义出在3D点云上Curve的概念:
并随后设计出一种Curve Grouping模块,在特征空间中对输入的点云提取curves。具体而言,作者依赖于MLP来作为可学习的walk policy,在点云上临近节点间进行转移,并将整个转移轨迹收集起来作为一个curve。
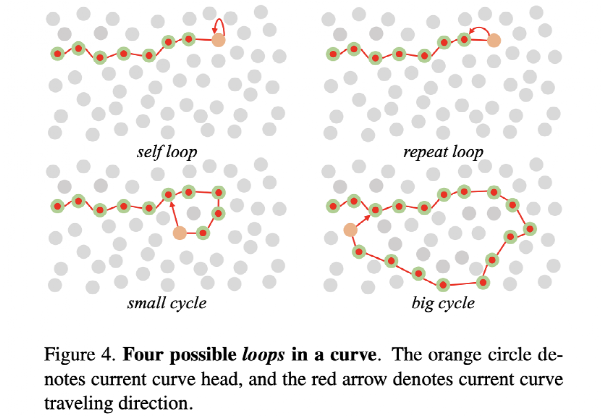
然而不同于随机游走(random walk),有导向的游走极有可能陷入各种各样的循环,使得curve携带多余的重复信息,对几何的表征能力大大降低。下图列出了四种潜在的循环,在curve grouping时应该完全避免:
基于此,作者用了一种简单的动态动量(dynamic momentum)的编码方法,使得每次节点转移时考虑到当前整体的curve进度,进而避免重复的游走规律。
除了应该完全避免的循环外,作者认为在curve grouping过程中仍然会遭遇交叉(crossover)。适量的交叉可能会携带有效的模式,因此不应该被完全避免,只需要相应的抑制。作者通过研究当前curve的前进方向(heading direction)对偏离直线前进的节点选择进行抑制,具体流程如下图:
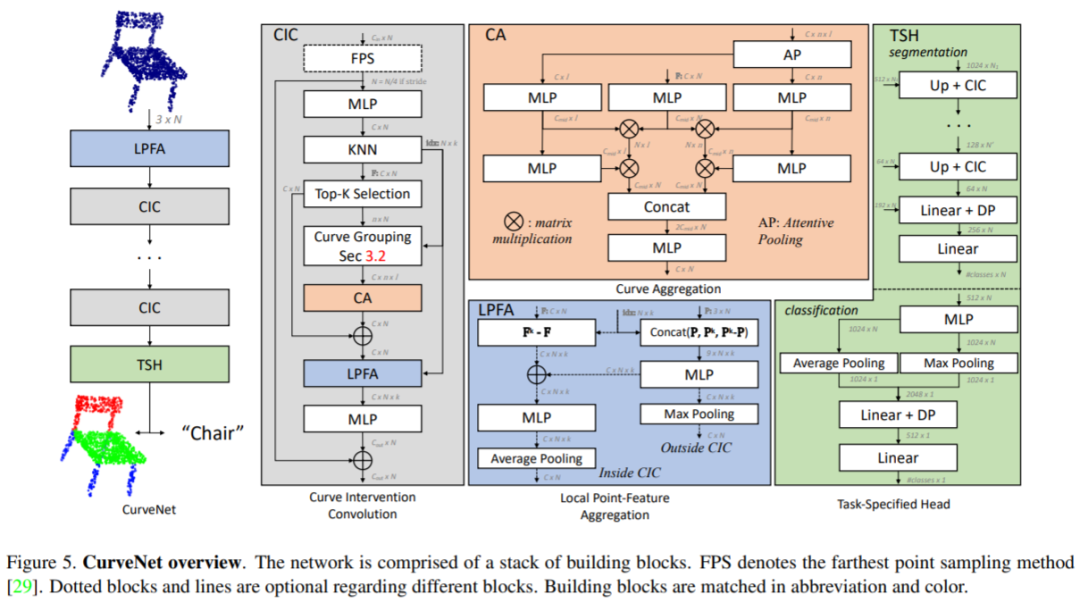
将固定数量和长度的curve按上述方法聚集之后,作者提出一种Curve Aggregation模块,通过attention的方式,对inter-curve和intra-curve的信息进行分开建模,并最终聚合到各个点特征上。
为了验证所提出方法的有效性,作者将Curve Grouping和Curve Aggregation模块融入到一个简单的ResNet-style的网络中,命名为CurveNet,来进行基础的点云形状分析任务,具体的网络结构如下图:
实验结果:
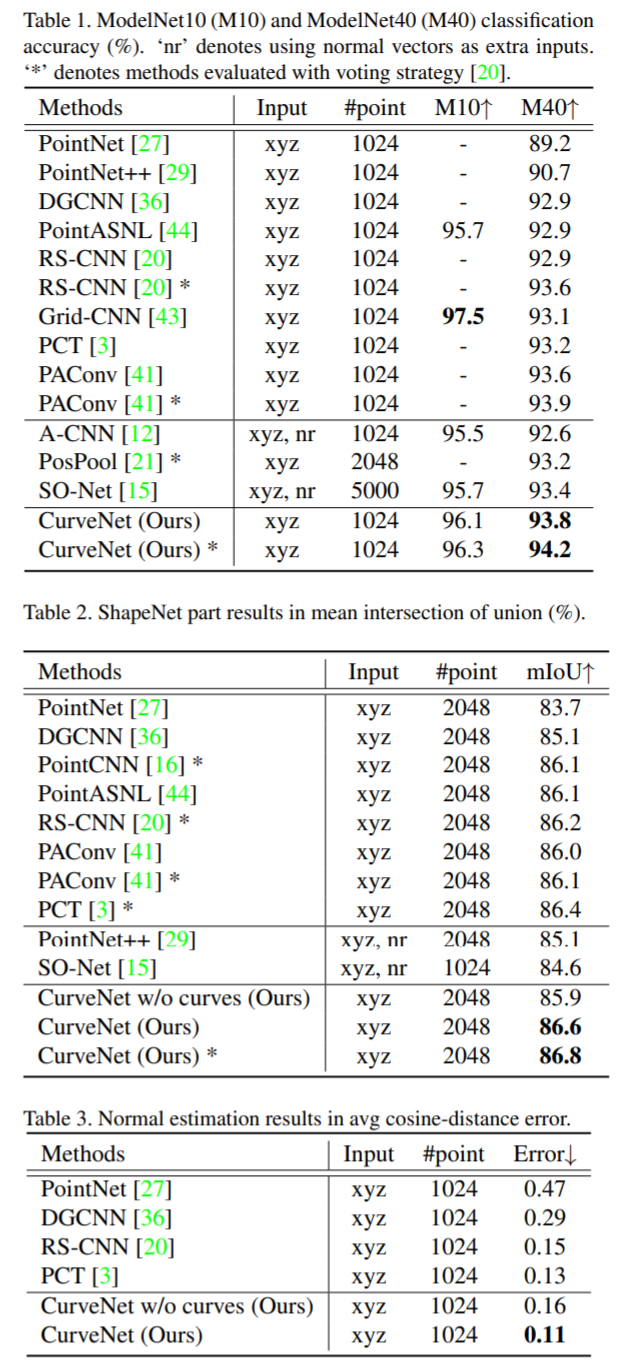
CurveNet在三大基础的点云形状分析任务(ModelNet40分类,ShapeNet Part部分分割,ModelNet40法线预测)上均达到了SOTA效果:
作者通过额外的可视化和消融实现,对提出的curve进行了分析:
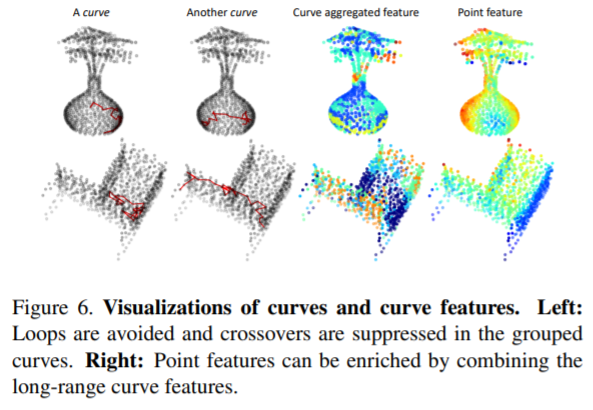
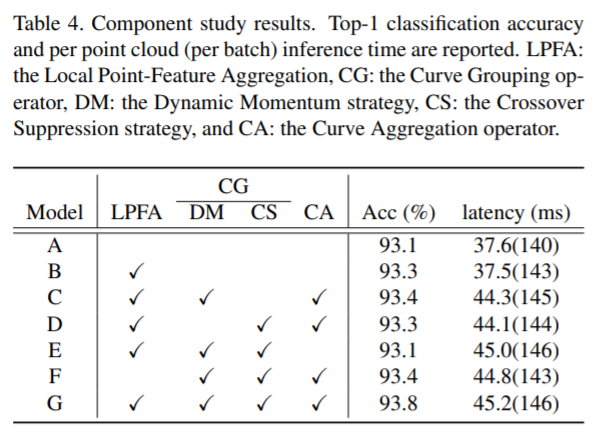
验证了本文提出方法的有效性。
ICCV和CVPR 2021论文和代码下载
后台回复:CVPR2021,即可下载CVPR 2021论文和代码开源的论文合集
后台回复:ICCV2021,即可下载ICCV 2021论文和代码开源的论文合集
后台回复:Transformer综述,即可下载最新的两篇Transformer综述PDF
重磅!3D点云交流群成立
扫码添加CVer助手,可申请加入CVer-3D点云微信交流群,方向已涵盖:目标检测、图像分割、目标跟踪、人脸检测&识别、OCR、姿态估计、超分辨率、SLAM、医疗影像、Re-ID、GAN、NAS、深度估计、自动驾驶、强化学习、车道线检测、模型剪枝&压缩、去噪、去雾、去雨、风格迁移、遥感图像、行为识别、视频理解、图像融合、图像检索、论文投稿&交流、PyTorch和TensorFlow等群。
一定要备注:研究方向+地点+学校/公司+昵称(如3D点云+上海+上交+卡卡),根据格式备注,可更快被通过且邀请进群

▲长按加小助手微信,进交流群
▲点击上方卡片,关注CVer公众号
整理不易,请点赞和在看![]()