python实现地牢迷宫生成
- 基本属性
- 生成房间
- 生成墙壁
- 生成门口
- 生成通道
基本属性
定义当前地牢的等级,地图长宽,房间数量,房间的最小最大长度,如下
class Map:
def __init__(self):
self.width = 30
self.heigh = 30
self.level = 1
self.roomNum = 5
self.map = np.zeros((self.heigh,self.width))
self.roomMin = 3
self.roomMax = 11
生成房间
编写initRoom()随机生成房间,限制最多循环次数,为了简单起见,先做一个不会重叠的房间。基本思路是:随机房间的中心点,随机房间的长宽,再进行判断房间有无重叠(在后续会生成通道,简单起见在这里也保证房间不会紧贴),若无重叠,房间有效,房间数加1。贴代码
def initRoom(self):
count = 0
roomCount = 1
while True:
count += 1
if count > 300:
break
if roomCount > self.roomNum:
break
x = random.randint(1,self.width-1)
y = random.randint(1,self.heigh-1)
wd = random.randint(self.roomMin,self.roomMax)
ht = random.randint(self.roomMin, self.roomMax)
r1 = ceil(y - ht/2)
r2 = ceil(y + ht/2)
c1 = ceil(x - wd/2)
c2 = ceil(x + wd/2)
if r1 < 1:
r1 = 1
if r2 >= self.heigh - 1:
r2 = self.heigh - 2
if c1 < 1:
c1 = 1
if c2 >= self.width - 1:
c2 = self.width - 2
w = c2 - c1 + 1
h = r2 - r1 + 1
if h / w >= 3 or w / h >= 3: #保证房间不是细长的
continue
judge = self.isValidRoom(r1,r2,c1,c2)
if judge == 0:
roomCount += 1
self.room.append(Room(r1,r2,c1,c2))
for i in range(r1,r2):
for j in range(c1,c2):
self.map[i,j] = 1
def isValidRoom(self,r1,r2,c1,c2):
#检测有无覆盖
for i in range(r1,r2):
for j in range(c1,c2):
if self.map[i,j] == 1:
return -1
#检测有无紧贴房间
for i in range(r1,r2):
if self.map[i,c1-1] == 1 or self.map[i,c2+1] == 1:
return 2
for i in range(c1,c2):
if self.map[r1-1,i] == 1 or self.map[r2+1,i] == 1:
return 2
return 0
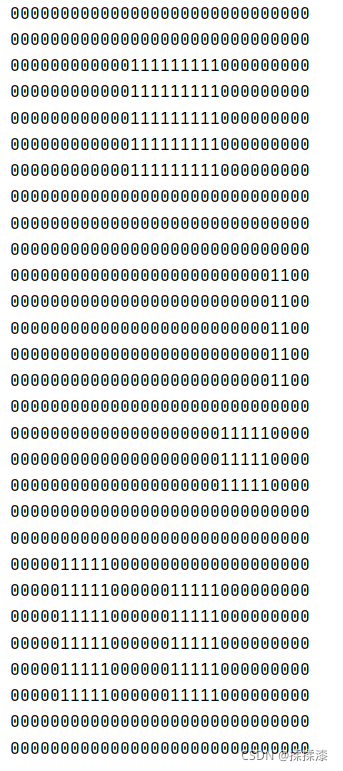
看一下效果
生成墙壁
编写initTile()生成包围房间和通道的墙壁,直接贴代码
def initTile(self):
offset = [[-1,0],[0,-1],[1,0],[0,1],[-1,-1],[1,1],[1,-1],[-1,1]]
for i in range(self.heigh):
for j in range(self.width):
if self.map[i,j] == 0:
tag = 0
for it in offset:
if i+it[0] >= self.heigh or j+it[1] >= self.width or i+it[0] < 0 or j+it[1] < 0:
continue
if self.map[i+it[0],j+it[1]] != 3 and self.map[i+it[0],j+it[1]] != 4:
tag += self.map[i+it[0],j+it[1]]
if tag:
self.map[i,j] = 3
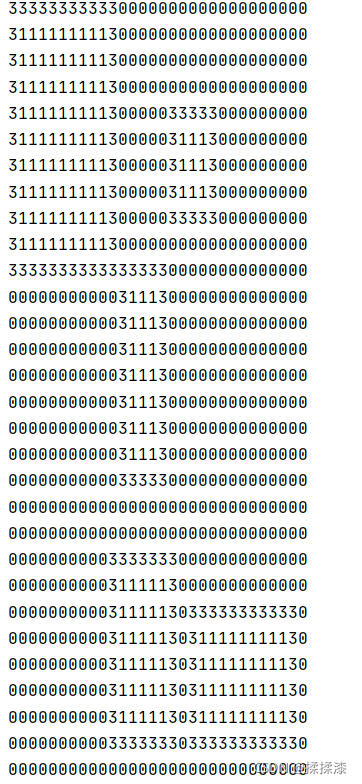
效果
生成门口
随机选取房间的一个外围点当做房门,思路是在房间的长宽内随机两个数作为偏移量,预定义好四个方向的覆盖模板对偏移量进行加权和偏置,在这里我编写房间的类,加进地图的属性列表里。
除此之外,房间连通的思路是:在所有房间列表中随机抽出两个房间,将这两个房间连通,再随机选一个房间加回原来的房间列表,直至最后列表里只剩下一个房间。那么现在先来生成房门,代码如下
class Room():
def __init__(self,r1,r2,c1,c2):
w = c2 - c1
h = r2 - r1
self.width = w
self.height = h
self.cx = c1 + ceil(w/2)
self.cy = r1 + ceil(h/2)
self.xStart = c1
self.xEnd = c2 - 1
self.yStart = r1
self.yEnd = r2 - 1
def randomTile(self):
direction = random.randint(0,3)
dir = [[0,1,-1,0],[1,0,0,-1],[1,0,0,self.height],[0,1,self.width,0]]
x_off = random.randint(0,self.width-1)
y_off = random.randint(0,self.height-1)
x = self.xStart + x_off*dir[direction][0] + dir[direction][2]
y = self.yStart + y_off*dir[direction][1] + dir[direction][3]
if y == 0 or x == 0:
return self.randomTile()
else:
return [y,x]
class Map:
def initPath(self):
#初始化门
rm = self.room.copy()
while len(rm) > 1:
r1 = random.choice(rm)
rm.remove(r1)
r2 = random.choice(rm)
rm.remove(r2)
point0 = r1.randomTile()
while point0[0] == self.heigh-1 or point0[1] == self.width-1:
point0 = r1.randomTile()
self.map[point0[0],point0[1]] = 2
self.door.append(point0)
self.breakTile(point0)
point1 = r2.randomTile()
while point1[0] == self.heigh-1 or point1[1] == self.width-1:
point1 = r2.randomTile()
self.map[point1[0],point1[1]] = 2
self.breakTile(point1)
self.door.append(point1)
rn = random.randint(0,1)
#a*算法寻找从point0到point1的路径
#self.aStar(point0,point1)
if rn == 0:
rm.append(r1)
else:
rm.append(r2)
def breakTile(self,p):
# 打通堵住的周围的墙壁
if self.map[p[0] - 1, p[1]] == 1 and self.map[p[0] + 1, p[1]] == 3:
self.map[p[0] + 1, p[1]] = 2
elif self.map[p[0], p[1] - 1] == 1 and self.map[p[0], p[1] + 1] == 3:
self.map[p[0], p[1] + 1] = 2
elif self.map[p[0] + 1, p[1]] == 1 and self.map[p[0] - 1, p[1]] == 3:
self.map[p[0] - 1, p[1]] = 2
elif self.map[p[0], p[1] + 1] == 1 and self.map[p[0], p[1] - 1] == 3:
self.map[p[0], p[1] - 1] = 2
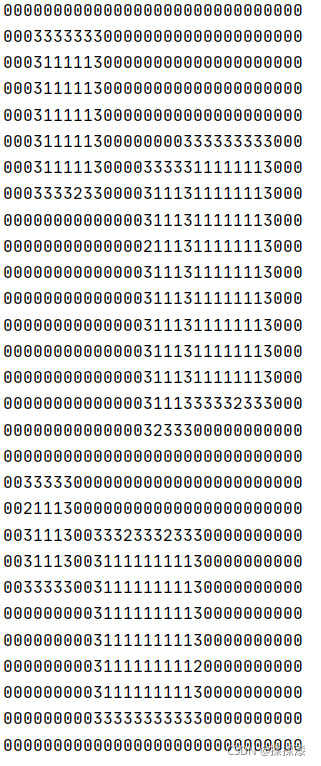
看下效果
生成通道
接着完善上述函数,在随机选取房门后,连接两个房门。
在这我选择的是A星算法,打通两个房门,直接上代码
def aStar(self,p0,p1):
open_list = []
close_list = []
offset = [[-1,0],[0,-1],[1,0],[0,1]]
f = h = abs(p0[0] - p1[0]) * 10 + abs(p0[1] - p1[1]) * 10
g = 0
def isInClose(p):
for it in close_list:
if it.value[3] == p:
return True
return False
def isInOpen(p):
for it in open_list:
if it.value[3] == p:
return True
return False
def findFather(p):
for it in close_list:
if it.value[3] == p:
return it.value[4]
return [-1,-1]
def findInOpen(p):
for it in open_list:
if it.value[3] == p:
return it
return None
open_list.append(Node([f,g,h,p0,[-1,-1]]))
while open_list:
#for it in open_list:
# print(it.value)
open_list.sort(key=(lambda x:x.value[0]))
f_min = open_list[0]
close_list.append(f_min)
open_list.remove(f_min)
for it in offset:
p2 = [f_min.value[3][0]+it[0], f_min.value[3][1]+it[1]]
if p2[0] == p1[0] and p2[1] == p1[1]:
#找到
close_list.append(Node([f,g,h,p2,f_min]))
p_father = f_min.value[3]
while True:
self.map[p_father[0],p_father[1]] = 2
p_father = findFather(p_father)
if p_father[0] == -1:
break
self.map[p0[0], p0[1]] = 4
return
if p2[0] < 0 or p2[0] >= self.heigh or p2[1] < 0 or p2[1] >= self.width:
continue
if (self.map[p2[0],p2[1]] != 0 and self.map[p2[0],p2[1]] != 2 and self.map[p2[0],p2[1]] != 4) or isInClose(p2):
continue
h = abs(p2[0] - p1[0]) * 10 + abs(p2[1] - p1[1]) * 10
g = f_min.value[1] + 10
f = h + g
if not isInOpen(p2):
open_list.append(Node([f,g,h,p2,f_min.value[3]]))
else:
#比较最小的G 值
temp = findInOpen(p2)
if g < temp.value[1]:
open_list.remove(temp)
open_list.append(Node([f,g,h,p2,f_min.value[3]]))
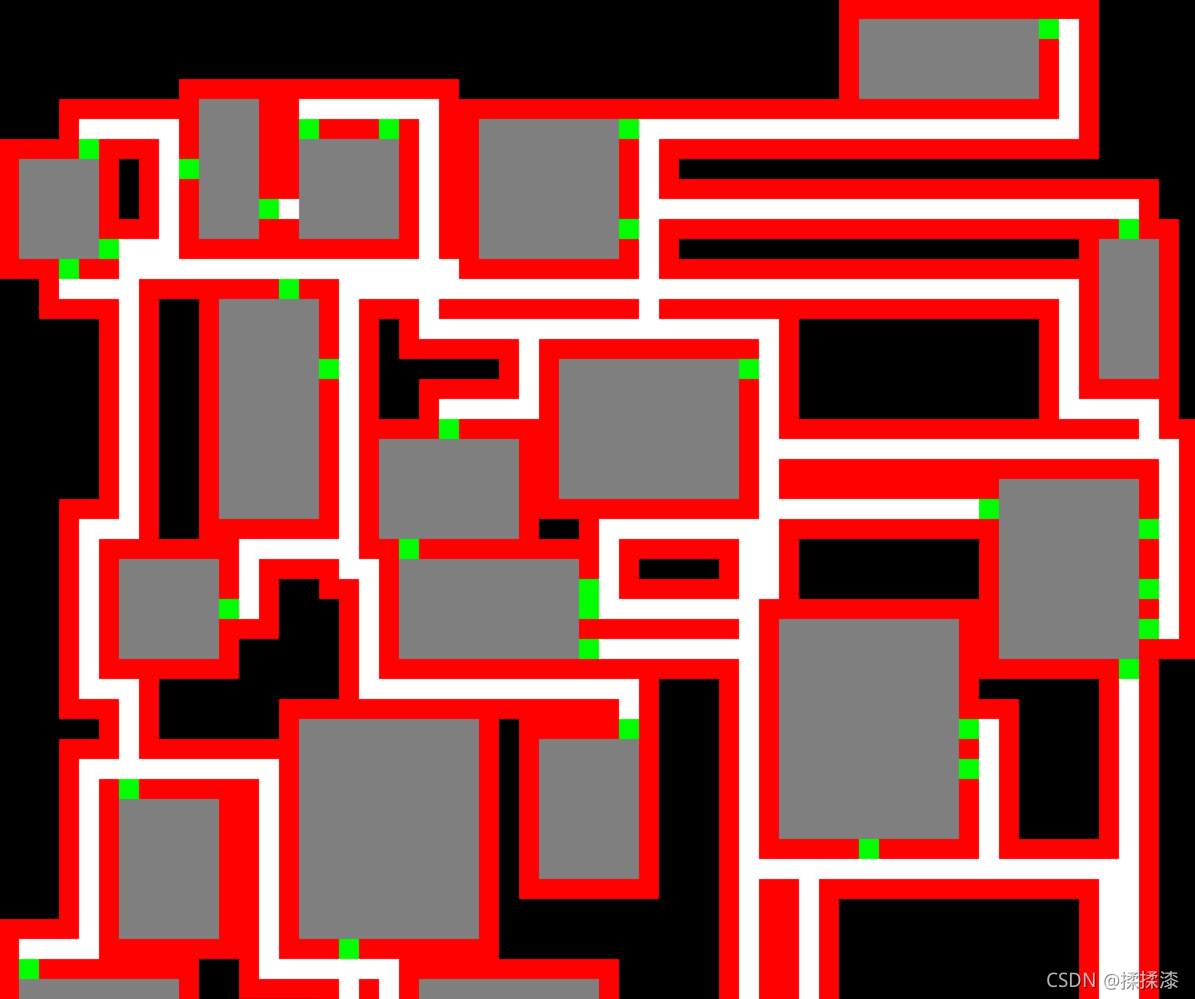
效果
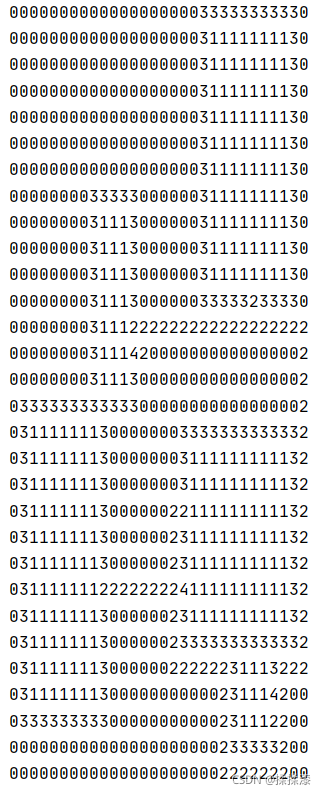
这样,一个随机房间的地牢就已经生成,贴上完整代码
import random
import numpy as np
from math import ceil
class Node():
def __init__(self, val=None):
if val is None:
val = [0, 0, 0, [-1, -1], [-1, -1]]
self.value = val
class Room():
def __init__(self,r1,r2,c1,c2):
w = c2 - c1
h = r2 - r1
self.width = w
self.height = h
self.cx = c1 + ceil(w/2)
self.cy = r1 + ceil(h/2)
self.xStart = c1
self.xEnd = c2 - 1
self.yStart = r1
self.yEnd = r2 - 1
def info(self):
print('r1 c1 r2 c2: ',self.yStart,self.xStart,self.yEnd,self.xEnd)
print('cx cy: ',self.cx,self.cy)
print('width height: ',self.width,self.height)
def randomTile(self):
direction = random.randint(0,3)
dir = [[0,1,-1,0],[1,0,0,-1],[1,0,0,self.height],[0,1,self.width,0]]
x_off = random.randint(0,self.width-1)
y_off = random.randint(0,self.height-1)
x = self.xStart + x_off*dir[direction][0] + dir[direction][2]
y = self.yStart + y_off*dir[direction][1] + dir[direction][3]
if y == 0 or x == 0:
return self.randomTile()
else:
return [y,x]
class Map:
def __init__(self):
self.width = 30
self.heigh = 30
self.level = 1
self.roomNum = 5
#0 is null, 1 is room, 2 is path, 3 is wall, 4 is door, 5 is up stair, 6 is downstair
self.map = np.zeros((self.width,self.heigh))
self.roomMin = 3
self.roomMax = 11
self.room = []
self.door = []
self.initRoom()
self.initTile()
self.initPath()
#self.initTile()
#self.initDoor()
def initRoom(self):
count = 0
roomCount = 1
while True:
count += 1
if count > 300:
break
if roomCount > self.roomNum:
break
x = random.randint(1,self.width-1)
y = random.randint(1,self.heigh-1)
wd = random.randint(self.roomMin,self.roomMax)
if wd % 2 == 0:
wd += 1
ht = random.randint(self.roomMin, self.roomMax)
if ht % 2 == 0:
ht += 1
r1 = ceil(y - ht/2)
r2 = ceil(y + ht/2)
c1 = ceil(x - wd/2)
c2 = ceil(x + wd/2)
if r1 < 1:
r1 = 1
if r2 >= self.heigh - 1:
r2 = self.heigh - 2
if c1 < 1:
c1 = 1
if c2 >= self.width - 1:
c2 = self.width - 2
w = c2 - c1 + 1
h = r2 - r1 + 1
if w == 0:
continue
if h == 0:
continue
if h / w >= 3 or w / h >= 3:
continue
judge = self.isValidRoom(r1,r2,c1,c2)
if judge == 0:
roomCount += 1
self.room.append(Room(r1,r2,c1,c2))
for i in range(r1,r2):
for j in range(c1,c2):
self.map[i,j] = 1
def initPath(self):
#初始化门
rm = self.room.copy()
while len(rm) > 1:
r1 = random.choice(rm)
rm.remove(r1)
r2 = random.choice(rm)
rm.remove(r2)
point0 = r1.randomTile()
while point0[0] == self.heigh-1 or point0[1] == self.width-1:
point0 = r1.randomTile()
self.map[point0[0],point0[1]] = 2
self.door.append(point0)
self.breakTile(point0)
point1 = r2.randomTile()
while point1[0] == self.heigh-1 or point1[1] == self.width-1:
point1 = r2.randomTile()
self.map[point1[0],point1[1]] = 2
self.breakTile(point1)
self.door.append(point1)
rn = random.randint(0,1)
#a*算法寻找从point0到point1的路径
self.aStar(point0,point1)
if rn == 0:
rm.append(r1)
else:
rm.append(r2)
def initDoor(self):
for it in self.door:
self.map[it[0],it[1]] = 4
def breakTile(self,p):
# 打通堵住的周围的墙壁
if self.map[p[0] - 1, p[1]] == 1 and self.map[p[0] + 1, p[1]] == 3:
self.map[p[0] + 1, p[1]] = 2
elif self.map[p[0], p[1] - 1] == 1 and self.map[p[0], p[1] + 1] == 3:
self.map[p[0], p[1] + 1] = 2
elif self.map[p[0] + 1, p[1]] == 1 and self.map[p[0] - 1, p[1]] == 3:
self.map[p[0] - 1, p[1]] = 2
elif self.map[p[0], p[1] + 1] == 1 and self.map[p[0], p[1] - 1] == 3:
self.map[p[0], p[1] - 1] = 2
def initTile(self):
offset = [[-1,0],[0,-1],[1,0],[0,1],[-1,-1],[1,1],[1,-1],[-1,1]]
for i in range(self.heigh):
for j in range(self.width):
if self.map[i,j] == 0:
tag = 0
for it in offset:
if i+it[0] >= self.heigh or j+it[1] >= self.width or i+it[0] < 0 or j+it[1] < 0:
continue
if self.map[i+it[0],j+it[1]] != 3 and self.map[i+it[0],j+it[1]] != 4:
tag += self.map[i+it[0],j+it[1]]
if tag:
self.map[i,j] = 3
def isValidRoom(self,r1,r2,c1,c2):
#检测有无覆盖
for i in range(r1,r2):
for j in range(c1,c2):
if self.map[i,j] == 1:
return -1
#检测有无紧贴房间
for i in range(r1,r2):
if self.map[i,c1-1] == 1 or self.map[i,c2+1] == 1:
return 2
for i in range(c1,c2):
if self.map[r1-1,i] == 1 or self.map[r2+1,i] == 1:
return 2
return 0
def aStar(self,p0,p1):
open_list = []
close_list = []
offset = [[-1,0],[0,-1],[1,0],[0,1]]
f = h = abs(p0[0] - p1[0]) * 10 + abs(p0[1] - p1[1]) * 10
g = 0
def isInClose(p):
for it in close_list:
if it.value[3] == p:
return True
return False
def isInOpen(p):
for it in open_list:
if it.value[3] == p:
return True
return False
def findFather(p):
for it in close_list:
if it.value[3] == p:
return it.value[4]
return [-1,-1]
def findInOpen(p):
for it in open_list:
if it.value[3] == p:
return it
return None
open_list.append(Node([f,g,h,p0,[-1,-1]]))
while open_list:
#for it in open_list:
# print(it.value)
open_list.sort(key=(lambda x:x.value[0]))
f_min = open_list[0]
close_list.append(f_min)
open_list.remove(f_min)
for it in offset:
p2 = [f_min.value[3][0]+it[0], f_min.value[3][1]+it[1]]
if p2[0] == p1[0] and p2[1] == p1[1]:
#找到
close_list.append(Node([f,g,h,p2,f_min]))
p_father = f_min.value[3]
while True:
self.map[p_father[0],p_father[1]] = 2
p_father = findFather(p_father)
if p_father[0] == -1:
break
self.map[p0[0], p0[1]] = 4
return
if p2[0] < 0 or p2[0] >= self.heigh or p2[1] < 0 or p2[1] >= self.width:
continue
if (self.map[p2[0],p2[1]] != 0 and self.map[p2[0],p2[1]] != 2 and self.map[p2[0],p2[1]] != 4) or isInClose(p2):
continue
h = abs(p2[0] - p1[0]) * 10 + abs(p2[1] - p1[1]) * 10
g = f_min.value[1] + 10
f = h + g
if not isInOpen(p2):
open_list.append(Node([f,g,h,p2,f_min.value[3]]))
else:
#比较最小的G 值
temp = findInOpen(p2)
if g < temp.value[1]:
open_list.remove(temp)
open_list.append(Node([f,g,h,p2,f_min.value[3]]))
def printMap(self):
for i in range(self.heigh):
for j in range(self.width):
print(int(self.map[i,j]),end='')
print()
def printRoom(self):
for r in self.room:
r.info()
if __name__ == '__main__':
map = Map()
map.printMap()
可视化一下