十分钟快速自制CMSIS_DAP仿真器,将ST-LINK-V2变身DAP仿真器!
(一)简介
说到单片机仿真器(下载器)首先想到的就是J-LINK和ST-LINK,很多人可能还是第一次听说DAP仿真器,那么就先介绍一下。
CMSIS DAP是ARM官方推出的开源仿真器,支持所有的Cortex-A/R/M器件,支持JTAG/SWD接口。有以下特点:
- 完全开源,没有版权限制,所以相应的价格会很便宜
- 不需要安装驱动,即插即用
- 在新版本的DAP里集成了串口,除了下载调试外还能充当USB转串口模块,一机两用
- 性能方面已经可以满足一般用户的需求
市面上基本所有的离线下载器基本都是基于CMSIS_DAP方案来的,例如正点原子的离线下载器、无线下载器等,还有就是国产单片机厂家做的调试器,例如GD32出的GD-LINK,都是基于CMSIS DAP方案改的。
而ST-LINK是ST官方出的,目前有V1、V2、V3版本,并且闭源,正版的很贵!你买到的很便宜,可能也就十几三十几块钱得样子,这是因为这都是盗版的!网上早就有人把ST-LINK-V2的固件给破解出来的,而且原理图也有,所以市面上的便宜货都是根据官方的原理图做出来的板子,然后下载进固件就完成了一个ST-LINK调试器!但是他们是没有ST-LINK的固件源代码的!
什么是在线调试下载?
在线调试器就是用keil或者iar等软件对目标MCU进行调试和下载程序,适用于开发阶段。像是ST-LINK、J-LINK就是在线调试器。
什么是离线下载?
当项目开发中已经接近尾声或者已经成熟后,那么每生产一块板子就需要刷程序,但是刷程序就需要连接到PC机上通过软件刷,这样的话就非常的麻烦,那么有没有一种方式是做一个小板子,把下载程序的功能集成到这个小板子中,这样的话刷程序就是用这个小板子给目标MCU刷程序,就是手持式的。
有!就是离线下载器!
离线下载器的功能说简单点就是Keil下载程序的功能!
关于本篇
教程持续更新,最终的目的是做一个在线调试+离线下载完整功能的仿真器。
本篇教程就先实现用keil能够在线调试下载程序和调试的功能,这是实现完整功能最简单的一步。
(二)调试器的原理
在教程开始之前,我觉得有必要说一下调试器的原理以及他是怎么工作的,怎么把程序下载到目标MCU的,这里以KEIL+ST-LINK为例进行说明。
我们使用keil下载程序的时候,必须要选定一个下载算法,如下所示:

当你使用STM32的时候必须要安装pack包,而下载算法就在pack包内,安装好后就在keil软件的安装目录下了,具体在这里:

Keil会根据你当前工程使用的芯片,自动去识别应该用哪一个下载算法,例如我目前这个工程是用的STM32F103C8这个芯片,FLASH容量是64K的,属于这个系列的小容量,那么KEIL就自动给我识别了STM32F103x_128.FLM这个下载算法。
那么这个下载算法是什么东西?
进入这个目录后,他有一个工程,而这个工程就是下载算法的模板工程,我们打开看一下:


打开工程后很简单的,就只有两个文件,函数也很简单都是对FLASH的操作,编译一下看看:

AXF(ARM Executable File)是ARM芯片使用的文件格式,它除了包含bin代码外,还包括了输出给调试器的调试信息
看到没!编译完了之后生成了STM32F103x_16.axf文件,然后只是做了一个文件复制并且重命名成了STM32F10x_16.FLM文件!
现在对下载算法就明确了,下载算法其实就是对目标MCU的FLASH的一系列操作函数!
那么KEIL给目标MCU下载程序的时候,其实就是解析出编译好的.axf文件,然后通过USB连接线经过ST-LINK先将下载算法加载进目标MCU的内存中并运行,由于.axf文件中包含的信息很多,其中就有当程序加载进内存后函数在内存中的地址,这个地址也可以通过.map文件查看(.map文件也是keil在编译完工程后生成的),知道函数在内存中的地址,就可以在外部通过特定的进行调用,所以STLINK就是接收来自KEIL的固件程序,然后操控目标单片机内存中的FLASH的操作函数,在通过SWD协议将固件下载进目标MCU的FLASH中,就这样实现了程序下载,后面我们会做离线下载器那么也就明确了,可以将接收KEIL的下发固件这一个步骤变成本地SD卡存储固件,这样不就实现了离线~

现在keil整个下载程序的流程清楚了后,我们的CMSIS_DAP就可以分成两步骤进行:
- 第一步:实现KEIL通过USB和DAP的通信
- 第二步:DAP通过SWD协议将收到固件下载进目标MCU
对于第一步,我们使用STM32CubeMX软件生成工程,然后对源码进行一个简单的修改就可以完成。如果你对USB没有一个充分的了解,本章教程可以先不用管为什么这么修改源代码,跟着步骤来即可,我的另一篇博客有对USB相关知识的扫盲,可以帮助你快速了解:https://blog.csdn.net/qq153471503/article/details/116053851
对于第二步,我们需要移植自ARM官方的CMSIS_DAP源码,源代码在Keil软件的安装目录下,ARM官方的代码是基于LPC单片机的,但是不妨碍我们移植使用:

我们需要的就是上图中这三个文件夹中的源文件以及USBD_User_HID_0.c文件即可,这个文件在这里:

(三)工程配置
紧接上文,现在开始实现第一步,由于我目前手头没有现成的硬件,然后我想起ST-LINK其实也是个STM32F103C8单片机,那么我用STLINK的板子不就行了,而且在网上还能找到原理图,省去了自己做板子验证的步骤,等软件调试完毕后,在做板子把它做得小巧精致些。



它的原理图是这样的:

从原理图上可知,使用的引脚分布如下:
- JTAG_nTRST(PB1)
- JTAG_nRESET(PB0)
- JTAG_TDI(PA7)
- JTAG_TMS(PB14,这个引脚也是SWD模式下的SWDIO引脚)
- JTAG_TCK(PB13/PA5,这个引脚也是SWD模式下的SWCLK引脚)
- JTAG_TDO(PA6/PA10)
- LED灯(PA9,低电平为红灯,高电平为绿灯)
对于JTAG_TCK,这是时钟信号引脚,官方用了PB13和PA5两个引脚,我猜测是因为为了提高抗干扰能力,JTAG和SWD两种模式下,使用不同的引脚当做时钟信号。JTAG_TMS引脚同理。
对于JTAG_TDO,当JTAG模式时,这是JTAG的数据输入引脚,当使用SWD模式时,这个引脚可以作为调试输出的作用,所以也是分成了两个引脚来用。
在本教程中,我们就各只用一个IO就可以,不搞那么麻烦。
下面开始贴一下我的配置,时钟配置到72M,并开启USB配置成48M,如下:

下载程序的调试接口配置为SWD模式:

USB的配置如下:



IO引脚的配置如下:

这就是全部的配置内容,然后生成代码就可以了!
(四)移植DAP源码
将DAP加入我们的工程,如下所示:
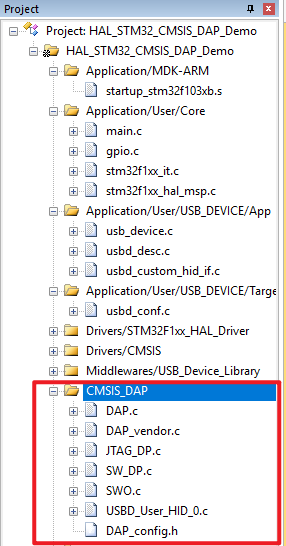
对于DAP源码的移植,我们主要就是修改DAP_config.h和USBD_User_HID_0.c俩文件,其中DAP_config.h是修改的GPIO以及DAP的一些默认配置参数,USBD_User_HID_0.c就是USB与PC的函数接口了,由于原CMSIS_DAP工程是基于LCP单片机并且跑了系统的,而我没有跑系统,所以就需要将USBD_User_HID_0.c文件中使用系统了的API换成轮训方式即可,下面贴一下我的配置:
DAP_config.h文件:
/*
* Copyright (c) 2013-2017 ARM Limited. All rights reserved.
*
* SPDX-License-Identifier: Apache-2.0
*
* Licensed under the Apache License, Version 2.0 (the License); you may
* not use this file except in compliance with the License.
* You may obtain a copy of the License at
*
* www.apache.org/licenses/LICENSE-2.0
*
* Unless required by applicable law or agreed to in writing, software
* distributed under the License is distributed on an AS IS BASIS, WITHOUT
* WARRANTIES OR CONDITIONS OF ANY KIND, either express or implied.
* See the License for the specific language governing permissions and
* limitations under the License.
*
* ----------------------------------------------------------------------
*
* $Date: 1. December 2017
* $Revision: V2.0.0
*
* Project: CMSIS-DAP Configuration
* Title: DAP_config.h CMSIS-DAP Configuration File (Template)
*
*---------------------------------------------------------------------------*/
#ifndef __DAP_CONFIG_H__
#define __DAP_CONFIG_H__
//**************************************************************************************************
/**
\defgroup DAP_Config_Debug_gr CMSIS-DAP Debug Unit Information
\ingroup DAP_ConfigIO_gr
@{
Provides definitions about the hardware and configuration of the Debug Unit.
This information includes:
- Definition of Cortex-M processor parameters used in CMSIS-DAP Debug Unit.
- Debug Unit Identification strings (Vendor, Product, Serial Number).
- Debug Unit communication packet size.
- Debug Access Port supported modes and settings (JTAG/SWD and SWO).
- Optional information about a connected Target Device (for Evaluation Boards).
*/
#include "main.h"
/// Processor Clock of the Cortex-M MCU used in the Debug Unit.
/// This value is used to calculate the SWD/JTAG clock speed.
#define CPU_CLOCK 72000000U ///< Specifies the CPU Clock in Hz.
/// Number of processor cycles for I/O Port write operations.
/// This value is used to calculate the SWD/JTAG clock speed that is generated with I/O
/// Port write operations in the Debug Unit by a Cortex-M MCU. Most Cortex-M processors
/// require 2 processor cycles for a I/O Port Write operation. If the Debug Unit uses
/// a Cortex-M0+ processor with high-speed peripheral I/O only 1 processor cycle might be
/// required.
#define IO_PORT_WRITE_CYCLES 2U ///< I/O Cycles: 2=default, 1=Cortex-M0+ fast I/0.
/// Indicate that Serial Wire Debug (SWD) communication mode is available at the Debug Access Port.
/// This information is returned by the command \ref DAP_Info as part of <b>Capabilities</b>.
#define DAP_SWD 1 ///< SWD Mode: 1 = available, 0 = not available.
/// Indicate that JTAG communication mode is available at the Debug Port.
/// This information is returned by the command \ref DAP_Info as part of <b>Capabilities</b>.
#define DAP_JTAG 1 ///< JTAG Mode: 1 = available, 0 = not available.
/// Configure maximum number of JTAG devices on the scan chain connected to the Debug Access Port.
/// This setting impacts the RAM requirements of the Debug Unit. Valid range is 1 .. 255.
#define DAP_JTAG_DEV_CNT 8U ///< Maximum number of JTAG devices on scan chain.
/// Default communication mode on the Debug Access Port.
/// Used for the command \ref DAP_Connect when Port Default mode is selected.
#define DAP_DEFAULT_PORT 1U ///< Default JTAG/SWJ Port Mode: 1 = SWD, 2 = JTAG.
/// Default communication speed on the Debug Access Port for SWD and JTAG mode.
/// Used to initialize the default SWD/JTAG clock frequency.
/// The command \ref DAP_SWJ_Clock can be used to overwrite this default setting.
#define DAP_DEFAULT_SWJ_CLOCK 10000000U ///< Default SWD/JTAG clock frequency in Hz.
/// Maximum Package Size for Command and Response data.
/// This configuration settings is used to optimize the communication performance with the
/// debugger and depends on the USB peripheral. Typical vales are 64 for Full-speed USB HID or WinUSB,
/// 1024 for High-speed USB HID and 512 for High-speed USB WinUSB.
#define DAP_PACKET_SIZE 64U ///< Specifies Packet Size in bytes.
/// Maximum Package Buffers for Command and Response data.
/// This configuration settings is used to optimize the communication performance with the
/// debugger and depends on the USB peripheral. For devices with limited RAM or USB buffer the
/// setting can be reduced (valid range is 1 .. 255).
#define DAP_PACKET_COUNT 8U ///< Specifies number of packets buffered.
/// Indicate that UART Serial Wire Output (SWO) trace is available.
/// This information is returned by the command \ref DAP_Info as part of <b>Capabilities</b>.
#define SWO_UART 0 ///< SWO UART: 1 = available, 0 = not available.
/// Maximum SWO UART Baudrate.
#define SWO_UART_MAX_BAUDRATE 10000000U ///< SWO UART Maximum Baudrate in Hz.
/// Indicate that Manchester Serial Wire Output (SWO) trace is available.
/// This information is returned by the command \ref DAP_Info as part of <b>Capabilities</b>.
#define SWO_MANCHESTER 0 ///< SWO Manchester: 1 = available, 0 = not available.
/// SWO Trace Buffer Size.
#define SWO_BUFFER_SIZE 4096U ///< SWO Trace Buffer Size in bytes (must be 2^n).
/// SWO Streaming Trace.
#define SWO_STREAM 0 ///< SWO Streaming Trace: 1 = available, 0 = not available.
/// Clock frequency of the Test Domain Timer. Timer value is returned with \ref TIMESTAMP_GET.
#define TIMESTAMP_CLOCK 72000000U ///< Timestamp clock in Hz (0 = timestamps not supported).
/// Debug Unit is connected to fixed Target Device.
/// The Debug Unit may be part of an evaluation board and always connected to a fixed
/// known device. In this case a Device Vendor and Device Name string is stored which
/// may be used by the debugger or IDE to configure device parameters.
#define TARGET_DEVICE_FIXED 0 ///< Target Device: 1 = known, 0 = unknown;
#if TARGET_DEVICE_FIXED
#define TARGET_DEVICE_VENDOR "ARM" ///< String indicating the Silicon Vendor
#define TARGET_DEVICE_NAME "Cortex-M4" ///< String indicating the Target Device
#endif
/** Get Vendor ID string.
\param str Pointer to buffer to store the string.
\return String length.
*/
__STATIC_INLINE uint8_t DAP_GetVendorString (char *str)
{
(void)str;
return (0U);
}
/** Get Product ID string.
\param str Pointer to buffer to store the string.
\return String length.
*/
__STATIC_INLINE uint8_t DAP_GetProductString (char *str)
{
(void)str;
return (0U);
}
/** Get Serial Number string.
\param str Pointer to buffer to store the string.
\return String length.
*/
__STATIC_INLINE uint8_t DAP_GetSerNumString (char *str)
{
(void)str;
return (0U);
}
///@}
//**************************************************************************************************
/**
\defgroup DAP_Config_PortIO_gr CMSIS-DAP Hardware I/O Pin Access
\ingroup DAP_ConfigIO_gr
@{
Standard I/O Pins of the CMSIS-DAP Hardware Debug Port support standard JTAG mode
and Serial Wire Debug (SWD) mode. In SWD mode only 2 pins are required to implement the debug
interface of a device. The following I/O Pins are provided:
JTAG I/O Pin | SWD I/O Pin | CMSIS-DAP Hardware pin mode
---------------------------- | -------------------- | ---------------------------------------------
TCK: Test Clock | SWCLK: Clock | Output Push/Pull
TMS: Test Mode Select | SWDIO: Data I/O | Output Push/Pull; Input (for receiving data)
TDI: Test Data Input | | Output Push/Pull
TDO: Test Data Output | | Input
nTRST: Test Reset (optional) | | Output Open Drain with pull-up resistor
nRESET: Device Reset | nRESET: Device Reset | Output Open Drain with pull-up resistor
DAP Hardware I/O Pin Access Functions
-------------------------------------
The various I/O Pins are accessed by functions that implement the Read, Write, Set, or Clear to
these I/O Pins.
For the SWDIO I/O Pin there are additional functions that are called in SWD I/O mode only.
This functions are provided to achieve faster I/O that is possible with some advanced GPIO
peripherals that can independently write/read a single I/O pin without affecting any other pins
of the same I/O port. The following SWDIO I/O Pin functions are provided:
- \ref PIN_SWDIO_OUT_ENABLE to enable the output mode from the DAP hardware.
- \ref PIN_SWDIO_OUT_DISABLE to enable the input mode to the DAP hardware.
- \ref PIN_SWDIO_IN to read from the SWDIO I/O pin with utmost possible speed.
- \ref PIN_SWDIO_OUT to write to the SWDIO I/O pin with utmost possible speed.
*/
// Configure DAP I/O pins ------------------------------
/** Setup JTAG I/O pins: TCK, TMS, TDI, TDO, nTRST, and nRESET.
Configures the DAP Hardware I/O pins for JTAG mode:
- TCK, TMS, TDI, nTRST, nRESET to output mode and set to high level.
- TDO to input mode.
*/
__STATIC_INLINE void PORT_JTAG_SETUP (void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TCK_GPIO_Port, JTAG_TCK_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TMS_GPIO_Port, JTAG_TMS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_nRESET_GPIO_Port, JTAG_nRESET_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TDI_GPIO_Port, JTAG_TDI_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TDO_GPIO_Port, JTAG_TDO_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_nTRST_GPIO_Port, JTAG_nTRST_Pin, GPIO_PIN_SET);
// LED
GPIO_InitStruct.Pin = LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);
// TCK
GPIO_InitStruct.Pin = JTAG_TCK_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TCK_GPIO_Port, &GPIO_InitStruct);
// TMS
GPIO_InitStruct.Pin = JTAG_TMS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TMS_GPIO_Port, &GPIO_InitStruct);
// TDI
GPIO_InitStruct.Pin = JTAG_TDI_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TDI_GPIO_Port, &GPIO_InitStruct);
// nRESET
GPIO_InitStruct.Pin = JTAG_nRESET_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_nRESET_GPIO_Port, &GPIO_InitStruct);
// nTRST
GPIO_InitStruct.Pin = JTAG_nTRST_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_nTRST_GPIO_Port, &GPIO_InitStruct);
// TDO
GPIO_InitStruct.Pin = JTAG_TDO_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
HAL_GPIO_Init(JTAG_TDO_GPIO_Port, &GPIO_InitStruct);
}
/** Setup SWD I/O pins: SWCLK, SWDIO, and nRESET.
Configures the DAP Hardware I/O pins for Serial Wire Debug (SWD) mode:
- SWCLK, SWDIO, nRESET to output mode and set to default high level.
- TDI, nTRST to HighZ mode (pins are unused in SWD mode).
*/
__STATIC_INLINE void PORT_SWD_SETUP (void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
__HAL_RCC_GPIOA_CLK_ENABLE();
__HAL_RCC_GPIOB_CLK_ENABLE();
__HAL_RCC_GPIOC_CLK_ENABLE();
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TCK_GPIO_Port, JTAG_TCK_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TMS_GPIO_Port, JTAG_TMS_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_nRESET_GPIO_Port, JTAG_nRESET_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TDI_GPIO_Port, JTAG_TDI_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_TDO_GPIO_Port, JTAG_TDO_Pin, GPIO_PIN_SET);
HAL_GPIO_WritePin(JTAG_nTRST_GPIO_Port, JTAG_nTRST_Pin, GPIO_PIN_SET);
// LED
GPIO_InitStruct.Pin = LED_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(LED_GPIO_Port, &GPIO_InitStruct);
// TCK
GPIO_InitStruct.Pin = JTAG_TCK_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TCK_GPIO_Port, &GPIO_InitStruct);
// TMS
GPIO_InitStruct.Pin = JTAG_TMS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TMS_GPIO_Port, &GPIO_InitStruct);
// nRESET
GPIO_InitStruct.Pin = JTAG_nRESET_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_OD;
GPIO_InitStruct.Pull = GPIO_PULLUP;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_nRESET_GPIO_Port, &GPIO_InitStruct);
// TDI TDO nTRST
HAL_GPIO_DeInit(JTAG_TDI_GPIO_Port, JTAG_TDI_Pin);
HAL_GPIO_DeInit(JTAG_TDO_GPIO_Port, JTAG_TDO_Pin);
HAL_GPIO_DeInit(JTAG_nTRST_GPIO_Port, JTAG_nTRST_Pin);
}
/** Disable JTAG/SWD I/O Pins.
Disables the DAP Hardware I/O pins which configures:
- TCK/SWCLK, TMS/SWDIO, TDI, TDO, nTRST, nRESET to High-Z mode.
*/
__STATIC_INLINE void PORT_OFF (void)
{
HAL_GPIO_DeInit(JTAG_TCK_GPIO_Port, JTAG_TCK_Pin);
HAL_GPIO_DeInit(JTAG_TMS_GPIO_Port, JTAG_TMS_Pin);
HAL_GPIO_DeInit(JTAG_nRESET_GPIO_Port, JTAG_nRESET_Pin);
HAL_GPIO_DeInit(JTAG_TDI_GPIO_Port, JTAG_TDI_Pin);
HAL_GPIO_DeInit(JTAG_TDO_GPIO_Port, JTAG_TDO_Pin);
HAL_GPIO_DeInit(JTAG_nTRST_GPIO_Port, JTAG_nTRST_Pin);
}
// SWCLK/TCK I/O pin -------------------------------------
/** SWCLK/TCK I/O pin: Get Input.
\return Current status of the SWCLK/TCK DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_SWCLK_TCK_IN (void)
{
return JTAG_TCK_GPIO_Port->ODR & JTAG_TCK_Pin ? 1 : 0;
}
/** SWCLK/TCK I/O pin: Set Output to High.
Set the SWCLK/TCK DAP hardware I/O pin to high level.
*/
__STATIC_FORCEINLINE void PIN_SWCLK_TCK_SET (void)
{
JTAG_TCK_GPIO_Port->BSRR = JTAG_TCK_Pin;
}
/** SWCLK/TCK I/O pin: Set Output to Low.
Set the SWCLK/TCK DAP hardware I/O pin to low level.
*/
__STATIC_FORCEINLINE void PIN_SWCLK_TCK_CLR (void)
{
JTAG_TCK_GPIO_Port->BRR = JTAG_TCK_Pin;
}
// SWDIO/TMS Pin I/O --------------------------------------
/** SWDIO/TMS I/O pin: Get Input.
\return Current status of the SWDIO/TMS DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_SWDIO_TMS_IN (void)
{
return JTAG_TMS_GPIO_Port->ODR & JTAG_TMS_Pin ? 1 : 0;
}
/** SWDIO/TMS I/O pin: Set Output to High.
Set the SWDIO/TMS DAP hardware I/O pin to high level.
*/
__STATIC_FORCEINLINE void PIN_SWDIO_TMS_SET (void)
{
JTAG_TMS_GPIO_Port->BSRR = JTAG_TMS_Pin;
}
/** SWDIO/TMS I/O pin: Set Output to Low.
Set the SWDIO/TMS DAP hardware I/O pin to low level.
*/
__STATIC_FORCEINLINE void PIN_SWDIO_TMS_CLR (void)
{
JTAG_TMS_GPIO_Port->BRR = JTAG_TMS_Pin;
}
/** SWDIO I/O pin: Get Input (used in SWD mode only).
\return Current status of the SWDIO DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_SWDIO_IN (void)
{
return JTAG_TMS_GPIO_Port->IDR & JTAG_TMS_Pin ? 1 : 0;
}
/** SWDIO I/O pin: Set Output (used in SWD mode only).
\param bit Output value for the SWDIO DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE void PIN_SWDIO_OUT (uint32_t bit)
{
if(bit & 0X01)
{
JTAG_TMS_GPIO_Port->BSRR = JTAG_TMS_Pin;
}
else
{
JTAG_TMS_GPIO_Port->BRR = JTAG_TMS_Pin;
}
}
/** SWDIO I/O pin: Switch to Output mode (used in SWD mode only).
Configure the SWDIO DAP hardware I/O pin to output mode. This function is
called prior \ref PIN_SWDIO_OUT function calls.
*/
__STATIC_FORCEINLINE void PIN_SWDIO_OUT_ENABLE (void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = JTAG_TMS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_OUTPUT_PP;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TMS_GPIO_Port, &GPIO_InitStruct);
}
/** SWDIO I/O pin: Switch to Input mode (used in SWD mode only).
Configure the SWDIO DAP hardware I/O pin to input mode. This function is
called prior \ref PIN_SWDIO_IN function calls.
*/
__STATIC_FORCEINLINE void PIN_SWDIO_OUT_DISABLE (void)
{
GPIO_InitTypeDef GPIO_InitStruct = {0};
GPIO_InitStruct.Pin = JTAG_TMS_Pin;
GPIO_InitStruct.Mode = GPIO_MODE_INPUT;
GPIO_InitStruct.Pull = GPIO_NOPULL;
GPIO_InitStruct.Speed = GPIO_SPEED_FREQ_HIGH;
HAL_GPIO_Init(JTAG_TMS_GPIO_Port, &GPIO_InitStruct);
}
// TDI Pin I/O ---------------------------------------------
/** TDI I/O pin: Get Input.
\return Current status of the TDI DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_TDI_IN (void)
{
return JTAG_TDI_GPIO_Port->ODR & JTAG_TDI_Pin ? 1 : 0;
}
/** TDI I/O pin: Set Output.
\param bit Output value for the TDI DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE void PIN_TDI_OUT (uint32_t bit)
{
if(bit & 0X01)
{
JTAG_TDI_GPIO_Port->BSRR = JTAG_TDI_Pin;
}
else
{
JTAG_TDI_GPIO_Port->BRR = JTAG_TDI_Pin;
}
}
// TDO Pin I/O ---------------------------------------------
/** TDO I/O pin: Get Input.
\return Current status of the TDO DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_TDO_IN (void)
{
return JTAG_TDO_GPIO_Port->IDR & JTAG_TDO_Pin ? 1 : 0;
}
// nTRST Pin I/O -------------------------------------------
/** nTRST I/O pin: Get Input.
\return Current status of the nTRST DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_nTRST_IN (void)
{
return JTAG_nTRST_GPIO_Port->ODR & JTAG_nTRST_Pin ? 1 : 0;
}
/** nTRST I/O pin: Set Output.
\param bit JTAG TRST Test Reset pin status:
- 0: issue a JTAG TRST Test Reset.
- 1: release JTAG TRST Test Reset.
*/
__STATIC_FORCEINLINE void PIN_nTRST_OUT (uint32_t bit)
{
if(bit & 0X01)
{
JTAG_nTRST_GPIO_Port->BSRR = JTAG_nTRST_Pin;
}
else
{
JTAG_nTRST_GPIO_Port->BRR = JTAG_nTRST_Pin;
}
}
// nRESET Pin I/O------------------------------------------
/** nRESET I/O pin: Get Input.
\return Current status of the nRESET DAP hardware I/O pin.
*/
__STATIC_FORCEINLINE uint32_t PIN_nRESET_IN (void)
{
return JTAG_nRESET_GPIO_Port->ODR & JTAG_nRESET_Pin ? 1 : 0;
}
/** nRESET I/O pin: Set Output.
\param bit target device hardware reset pin status:
- 0: issue a device hardware reset.
- 1: release device hardware reset.
*/
__STATIC_FORCEINLINE void PIN_nRESET_OUT (uint32_t bit)
{
if(bit & 0X01)
{
JTAG_nRESET_GPIO_Port->BSRR = JTAG_nRESET_Pin;
}
else
{
JTAG_nRESET_GPIO_Port->BRR = JTAG_nRESET_Pin;
}
}
///@}
//**************************************************************************************************
/**
\defgroup DAP_Config_LEDs_gr CMSIS-DAP Hardware Status LEDs
\ingroup DAP_ConfigIO_gr
@{
CMSIS-DAP Hardware may provide LEDs that indicate the status of the CMSIS-DAP Debug Unit.
It is recommended to provide the following LEDs for status indication:
- Connect LED: is active when the DAP hardware is connected to a debugger.
- Running LED: is active when the debugger has put the target device into running state.
*/
/** Debug Unit: Set status of Connected LED.
\param bit status of the Connect LED.
- 1: Connect LED ON: debugger is connected to CMSIS-DAP Debug Unit.
- 0: Connect LED OFF: debugger is not connected to CMSIS-DAP Debug Unit.
*/
__STATIC_INLINE void LED_CONNECTED_OUT (uint32_t bit)
{
if(bit & 0X01)
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET); // 拉低是亮黄灯
}
else
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET); // 拉高是亮红灯
}
}
/** Debug Unit: Set status Target Running LED.
\param bit status of the Target Running LED.
- 1: Target Running LED ON: program execution in target started.
- 0: Target Running LED OFF: program execution in target stopped.
*/
__STATIC_INLINE void LED_RUNNING_OUT (uint32_t bit)
{
if(bit & 0X01)
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_RESET); // 拉低是亮黄灯
}
else
{
HAL_GPIO_WritePin(LED_GPIO_Port, LED_Pin, GPIO_PIN_SET); // 拉高是亮红灯
}
}
///@}
//**************************************************************************************************
/**
\defgroup DAP_Config_Timestamp_gr CMSIS-DAP Timestamp
\ingroup DAP_ConfigIO_gr
@{
Access function for Test Domain Timer.
The value of the Test Domain Timer in the Debug Unit is returned by the function \ref TIMESTAMP_GET. By
default, the DWT timer is used. The frequency of this timer is configured with \ref TIMESTAMP_CLOCK.
*/
/** Get timestamp of Test Domain Timer.
\return Current timestamp value.
*/
__STATIC_INLINE uint32_t TIMESTAMP_GET (void)
{
return (DWT->CYCCNT);
}
///@}
//**************************************************************************************************
/**
\defgroup DAP_Config_Initialization_gr CMSIS-DAP Initialization
\ingroup DAP_ConfigIO_gr
@{
CMSIS-DAP Hardware I/O and LED Pins are initialized with the function \ref DAP_SETUP.
*/
/** Setup of the Debug Unit I/O pins and LEDs (called when Debug Unit is initialized).
This function performs the initialization of the CMSIS-DAP Hardware I/O Pins and the
Status LEDs. In detail the operation of Hardware I/O and LED pins are enabled and set:
- I/O clock system enabled.
- all I/O pins: input buffer enabled, output pins are set to HighZ mode.
- for nTRST, nRESET a weak pull-up (if available) is enabled.
- LED output pins are enabled and LEDs are turned off.
*/
__STATIC_INLINE void DAP_SETUP (void)
{
PORT_JTAG_SETUP();
}
/** Reset Target Device with custom specific I/O pin or command sequence.
This function allows the optional implementation of a device specific reset sequence.
It is called when the command \ref DAP_ResetTarget and is for example required
when a device needs a time-critical unlock sequence that enables the debug port.
\return 0 = no device specific reset sequence is implemented.\n
1 = a device specific reset sequence is implemented.
*/
__STATIC_INLINE uint8_t RESET_TARGET (void)
{
return (1U); // change to '1' when a device reset sequence is implemented
}
///@}
#endif /* __DAP_CONFIG_H__ */
USBD_User_HID_0.c文件:
/*------------------------------------------------------------------------------
* MDK Middleware - Component ::USB:Device
* Copyright (c) 2004-2017 ARM Germany GmbH. All rights reserved.
*------------------------------------------------------------------------------
* Name: USBD_User_HID_0.c
* Purpose: USB Device Human Interface Device class (HID) User module
* Rev.: V6.2.3
*----------------------------------------------------------------------------*/
/**
* \addtogroup usbd_hidFunctions
*
* USBD_User_HID_0.c implements the application specific functionality of the
* HID class and is used to receive and send data reports to the USB Host.
*
* The implementation must match the configuration file USBD_Config_HID_0.h.
* The following values in USBD_Config_HID_0.h affect the user code:
*
* - 'Endpoint polling Interval' specifies the frequency of requests
* initiated by USB Host for \ref USBD_HIDn_GetReport.
*
* - 'Number of Output Reports' configures the values for \em rid of
* \ref USBD_HIDn_SetReport.
*
* - 'Number of Input Reports' configures the values for \em rid of
* \ref USBD_HIDn_GetReport and \ref USBD_HID_GetReportTrigger.
*
* - 'Maximum Input Report Size' specifies the maximum value for:
* - return of \ref USBD_HIDn_GetReport
* - len of \ref USBD_HID_GetReportTrigger.
*
* - 'Maximum Output Report Size' specifies the maximum value for \em len
* in \ref USBD_HIDn_SetReport for rtype=HID_REPORT_OUTPUT
*
* - 'Maximum Feature Report Size' specifies the maximum value for \em len
* in \ref USBD_HIDn_SetReport for rtype=HID_REPORT_FEATURE
*
*/
//! [code_USBD_User_HID]
#include <stdint.h>
#include <string.h>
#include <stdbool.h>
#include "DAP_config.h"
#include "DAP.h"
#include "usbd_custom_hid_if.h"
#define HID_REPORT_INPUT 0x81
#define HID_REPORT_OUTPUT 0x91
#define HID_REPORT_FEATURE 0xB1
#define USBD_HID_REQ_EP_CTRL 0x01
#define USBD_HID_REQ_PERIOD_UPDATE 0x02
#define USBD_HID_REQ_EP_INT 0x03
static volatile uint16_t USB_RequestIndexI; // Request Index In
static volatile uint16_t USB_RequestIndexO; // Request Index Out
static volatile uint16_t USB_RequestCountI; // Request Count In
static volatile uint16_t USB_RequestCountO; // Request Count Out
static volatile uint16_t USB_ResponseIndexI; // Response Index In
static volatile uint16_t USB_ResponseIndexO; // Response Index Out
static volatile uint16_t USB_ResponseCountI; // Response Count In
static volatile uint16_t USB_ResponseCountO; // Response Count Out
static volatile uint8_t USB_ResponseIdle; // Response Idle Flag
static volatile uint32_t USB_EventFlags;
static uint8_t USB_Request [DAP_PACKET_COUNT][DAP_PACKET_SIZE]; // Request Buffer
static uint8_t USB_Response[DAP_PACKET_COUNT][DAP_PACKET_SIZE]; // Response Buffer
extern USBD_HandleTypeDef hUsbDeviceFS;
// Called during USBD_Initialize to initialize the USB HID class instance.
void USBD_HID0_Initialize (void)
{
// Initialize variables
USB_RequestIndexI = 0U;
USB_RequestIndexO = 0U;
USB_RequestCountI = 0U;
USB_RequestCountO = 0U;
USB_ResponseIndexI = 0U;
USB_ResponseIndexO = 0U;
USB_ResponseCountI = 0U;
USB_ResponseCountO = 0U;
USB_ResponseIdle = 1U;
USB_EventFlags = 0U;
}
// Called during USBD_Uninitialize to de-initialize the USB HID class instance.
void USBD_HID0_Uninitialize (void)
{
}
// \brief Prepare HID Report data to send.
// \param[in] rtype report type:
// - HID_REPORT_INPUT = input report requested
// - HID_REPORT_FEATURE = feature report requested
// \param[in] req request type:
// - USBD_HID_REQ_EP_CTRL = control endpoint request
// - USBD_HID_REQ_PERIOD_UPDATE = idle period expiration request
// - USBD_HID_REQ_EP_INT = previously sent report on interrupt endpoint request
// \param[in] rid report ID (0 if only one report exists).
// \param[out] buf buffer containing report data to send.
// \return number of report data bytes prepared to send or invalid report requested.
// - value >= 0: number of report data bytes prepared to send
// - value = -1: invalid report requested
int32_t USBD_HID0_GetReport (uint8_t rtype, uint8_t req, uint8_t rid, uint8_t *buf)
{
(void)rid;
switch (rtype)
{
case HID_REPORT_INPUT:
switch (req)
{
case USBD_HID_REQ_EP_CTRL: // Explicit USB Host request via Control OUT Endpoint
case USBD_HID_REQ_PERIOD_UPDATE: // Periodic USB Host request via Interrupt OUT Endpoint
break;
case USBD_HID_REQ_EP_INT: // Called after USBD_HID_GetReportTrigger to signal data obtained.
if (USB_ResponseCountI != USB_ResponseCountO)
{
// Load data from response buffer to be sent back
memcpy(buf, USB_Response[USB_ResponseIndexO], DAP_PACKET_SIZE);
USB_ResponseIndexO++;
if (USB_ResponseIndexO == DAP_PACKET_COUNT)
{
USB_ResponseIndexO = 0U;
}
USB_ResponseCountO++;
return ((int32_t)DAP_PACKET_SIZE);
}
else
{
USB_ResponseIdle = 1U;
}
break;
}
break;
case HID_REPORT_FEATURE:
break;
}
return (0);
}
// \brief Process received HID Report data.
// \param[in] rtype report type:
// - HID_REPORT_OUTPUT = output report received
// - HID_REPORT_FEATURE = feature report received
// \param[in] req request type:
// - USBD_HID_REQ_EP_CTRL = report received on control endpoint
// - USBD_HID_REQ_EP_INT = report received on interrupt endpoint
// \param[in] rid report ID (0 if only one report exists).
// \param[in] buf buffer that receives report data.
// \param[in] len length of received report data.
// \return true received report data processed.
// \return false received report data not processed or request not supported.
bool USBD_HID0_SetReport (uint8_t rtype, uint8_t req, uint8_t rid, const uint8_t *buf, int32_t len)
{
(void)req;
(void)rid;
switch (rtype)
{
case HID_REPORT_OUTPUT:
if (len == 0)
{
break;
}
if (buf[0] == ID_DAP_TransferAbort)
{
DAP_TransferAbort = 1U;
break;
}
if ((uint16_t)(USB_RequestCountI - USB_RequestCountO) == DAP_PACKET_COUNT)
{
USB_EventFlags |= 0X80;
break; // Discard packet when buffer is full
}
// Store received data into request buffer
memcpy(USB_Request[USB_RequestIndexI], buf, (uint32_t)len);
USB_RequestIndexI++;
if (USB_RequestIndexI == DAP_PACKET_COUNT)
{
USB_RequestIndexI = 0U;
}
USB_RequestCountI++;
USB_EventFlags |= 0X01;
break;
case HID_REPORT_FEATURE:
break;
}
return true;
}
void USBD_HID0_OutEvent_FS(void)
{
USBD_CUSTOM_HID_HandleTypeDef *hhid = (USBD_CUSTOM_HID_HandleTypeDef *)hUsbDeviceFS.pClassData;
USBD_HID0_SetReport(HID_REPORT_OUTPUT, 0, 0, hhid->Report_buf, USBD_CUSTOMHID_OUTREPORT_BUF_SIZE);
}
void USBD_HID0_InEvent_FS(void)
{
int32_t len;
USBD_CUSTOM_HID_HandleTypeDef *hhid = (USBD_CUSTOM_HID_HandleTypeDef *)hUsbDeviceFS.pClassData;
if ((len=USBD_HID0_GetReport(HID_REPORT_INPUT, USBD_HID_REQ_EP_INT, 0, hhid->Report_buf)) > 0)
{
USBD_HID_GetReportTrigger(0, 0, hhid->Report_buf, len);
}
}
// DAP Thread.
__NO_RETURN void DAP_Thread (void *argument)
{
uint32_t n;
uint32_t flags = 0;
(void)argument;
for (;;)
{
while((USB_EventFlags & 0X81) == 0)
{
;
}
USB_EventFlags &= (~0X81);
// Process pending requests
while (USB_RequestCountI != USB_RequestCountO)
{
// Handle Queue Commands
n = USB_RequestIndexO;
while (USB_Request[n][0] == ID_DAP_QueueCommands)
{
USB_Request[n][0] = ID_DAP_ExecuteCommands;
n++;
if (n == DAP_PACKET_COUNT)
{
n = 0U;
}
if (n == USB_RequestIndexI)
{
while((USB_EventFlags & 0X81) == 0)
{
;
}
flags = USB_EventFlags;
USB_EventFlags &= (~0X81);
if(flags & 0X80)
{
break;
}
}
}
// Execute DAP Command (process request and prepare response)
DAP_ExecuteCommand(USB_Request[USB_RequestIndexO], USB_Response[USB_ResponseIndexI]);
// Update Request Index and Count
USB_RequestIndexO++;
if (USB_RequestIndexO == DAP_PACKET_COUNT)
{
USB_RequestIndexO = 0U;
}
USB_RequestCountO++;
// Update Response Index and Count
USB_ResponseIndexI++;
if (USB_ResponseIndexI == DAP_PACKET_COUNT)
{
USB_ResponseIndexI = 0U;
}
USB_ResponseCountI++;
if (USB_ResponseIdle)
{
if (USB_ResponseCountI != USB_ResponseCountO)
{
// Load data from response buffer to be sent back
n = USB_ResponseIndexO++;
if (USB_ResponseIndexO == DAP_PACKET_COUNT)
{
USB_ResponseIndexO = 0U;
}
USB_ResponseCountO++;
USB_ResponseIdle = 0U;
USBD_HID_GetReportTrigger(0U, 0U, USB_Response[n], DAP_PACKET_SIZE);
}
}
}
}
}
//! [code_USBD_User_HID]
现在其实就是完成了第二步,DAP通过SWD协议将固件下载进目标单片机FLASH中的步骤,那么下面就开始修改USB的配置,KEIL能通过USB和DAP通信。
修改usbd_custom_hid_if.c文件,找到CUSTOM_HID_ReportDesc_FS数组,改为:
/** Usb HID report descriptor. */
__ALIGN_BEGIN static uint8_t CUSTOM_HID_ReportDesc_FS[USBD_CUSTOM_HID_REPORT_DESC_SIZE] __ALIGN_END =
{
/* USER CODE BEGIN 0 */
0x06,0x00,0xFF, /* Usage Page (vendor defined) ($FF00) global */
0x09,0x01, /* Usage (vendor defined) ($01) local */
0xA1,0x01, /* Collection (Application) */
0x15,0x00, /* LOGICAL_MINIMUM (0) */
0x25,0xFF, /* LOGICAL_MAXIMUM (255) */
0x75,0x08, /* REPORT_SIZE (8bit) */
// Input Report
0x95,64, /* Report Length (64 REPORT_SIZE) */
0x09,0x01, /* USAGE (Vendor Usage 1) */
0x81,0x02, /* Input(data,var,absolute) */
// Output Report
0x95,64, /* Report Length (64 REPORT_SIZE) */
0x09,0x01, /* USAGE (Vendor Usage 1) */
0x91,0x02, /* Output(data,var,absolute) */
// Feature Report
0x95,64, /* Report Length (64 REPORT_SIZE) */
0x09,0x01, /* USAGE (Vendor Usage 1) */
0xB1,0x02, /* Feature(data,var,absolute) */
/* USER CODE END 0 */
0xC0 /* END_COLLECTION */
};
导入USBD_User_HID_0.c文件中的这四个函数,并新写一个CUSTOM_HID_InEvent_FS函数:

修改以下几个函数添加调用:


修改usbd_custom_hid_if.h文件,导出新增的USBD_HID_GetReportTrigger这个函数声明:

然后修改usbd_customhid.h文件的这几个宏:

然后在改一下USBD_CUSTOM_HID_ItfTypeDef这个结构,需要新增一个函数指针:

然后修改main.c文件,添加头文件包含:

main函数内容如下:

至此,就已经完成了一个CMSIS_DAP仿真器!
下载编译工程,将程序下载进STLINK的板子中去试试吧!
注:STLINK可能设置了写保护,需要先解除写保护才能用KEIL给它下载程序,解除办法见我的另一篇博客:STM32下载程序问题解决:Can not read memory! Disable Read Out Proyection and try.
(五)测试CMSIS_DAP仿真器
将程序下载进板子后,USB插入电脑,设备管理器->人体学输入设备会多出一个USB输入设备和符合HID标准的供应商定义设备,如下图:

然后我们打开KEIL,调试器选择CMSIS_DAP:

给目标板下载程序:


没问题!再试试在线调试:

也没问题!成功!
ends…