国赛A题分析
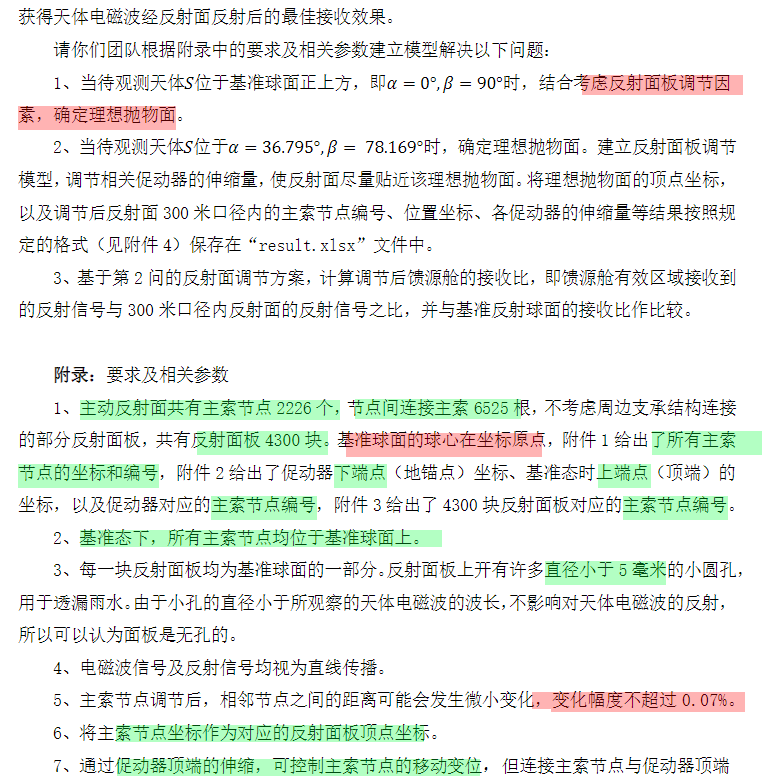
文章目录
- 国赛A题分析
- 问题导读
- 建立模型
- 求解算法
- 结果展示(附代码)
问题导读
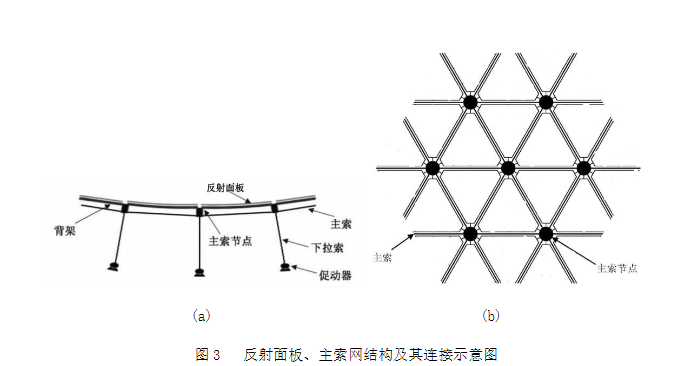
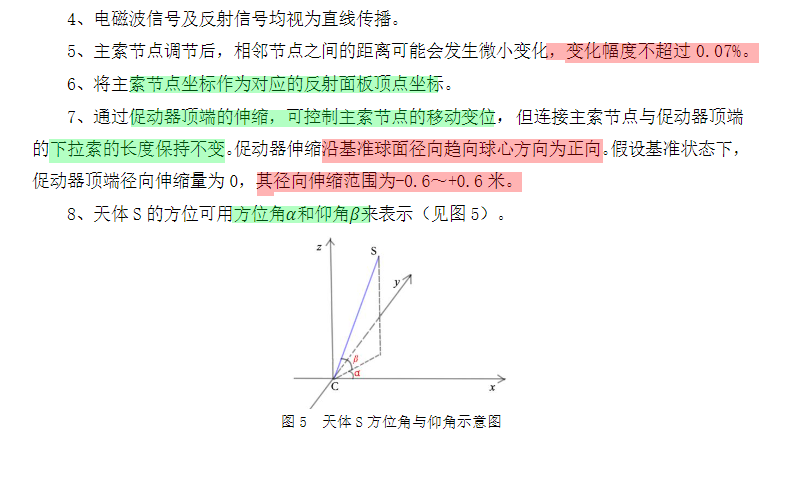
FAST 由主动反射面、信号接收系统(馈源舱)以及相关的控制、测量和支承系统组成(如 图 1 所示),其中主动反射面系统是由主索网、反射面板、下拉索、促动器及支承结构等主要 部件构成的一个可调节球面。
说白了就是一个传统的优化问题。首先我们注意一下重要的两个约束条件:
- 主索节点调节后,相邻节点之间的距离可能会发生微小变。变化幅度不能超过0.07%
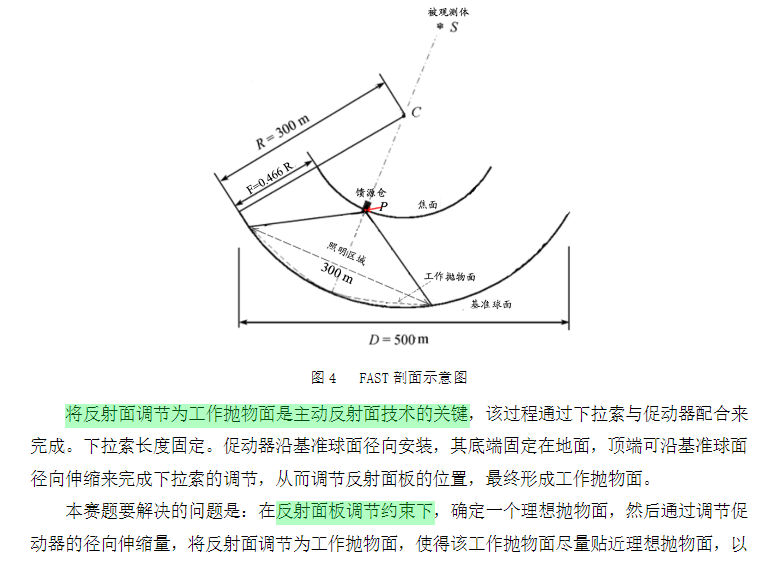
- 促动器伸缩沿基准球面径向趋向球心方向为正向。基准状态下,促动器顶端径向伸缩量为 0,其径向伸缩范围为**-0.6~+0.6 米**。
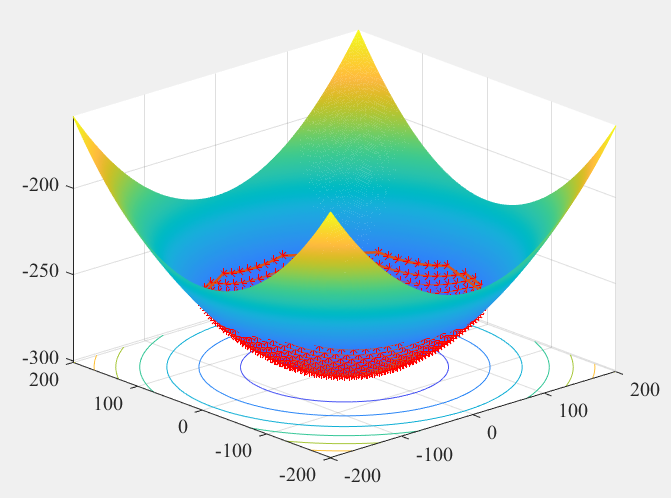
绘图如下:
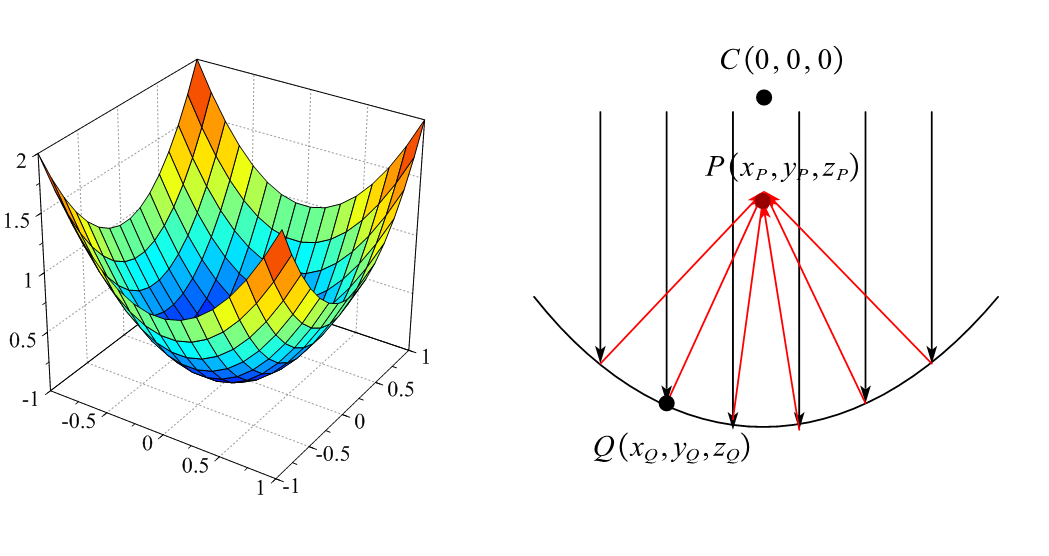
设所有的主索节点集合为 Q \mathcal{Q} Q,(相邻主索节点 ( x i , y i , z i ) (x_i,y_i,z_i) (xi,yi,zi)、 ( x j , y j , z j ) (x_j,y_j,z_j) (xj,yj,zj) )来说,
第一个约束好理解,
− 0.07 % ∣ ∣ q i 0 − q j 0 ∣ ∣ 2 ≤ ( ∣ ∣ q i − q j ∣ ∣ 2 − ∣ ∣ q i 0 − q j 0 ∣ ∣ 2 ) ≤ 0.07 % ∣ ∣ q i 0 − q j 0 ∣ ∣ 2 , ∀ i , j ∈ Q -0.07\%||\boldsymbol{q}_{i}^{0}-\boldsymbol{q}_{j}^{0}||_2\le \left( ||\boldsymbol{q}_i-\boldsymbol{q}_j||_2-||\boldsymbol{q}_{i}^{0}-\boldsymbol{q}_{j}^{0}||_2 \right) \le 0.07\%||\boldsymbol{q}_{i}^{0}-\boldsymbol{q}_{j}^{0}||_2 ,\forall i,j \in \mathcal{Q} −0.07%∣∣qi0−qj0∣∣2≤(∣∣qi−qj∣∣2−∣∣qi0−qj0∣∣2)≤0.07%∣∣qi0−qj0∣∣2,∀i,j∈Q
q i 0 \boldsymbol{q}_{i}^{0} qi0为基准态时 i i i主索节点位置, q i \boldsymbol{q}_{i} qi为时 i i i为工作态时主索节点位置, q i \boldsymbol{q}_{i} qi和 q j \boldsymbol{q}_{j} qj相邻。
对于第二个约束:
容易知
Q
Q
Q点法向量为:
n
Q
:
(
−
x
Q
,
−
y
Q
,
−
z
Q
)
\boldsymbol{n}_Q: \left( -x_Q,-y_Q,-z_Q \right)
nQ:(−xQ,−yQ,−zQ)
因此,主索节点、促动器顶端,下端点的坐标成比例:
据此特点可以通过引进伸缩因子简化变量的维度。(具体见模型)
优化目标,这个是重点,留在模型中解释
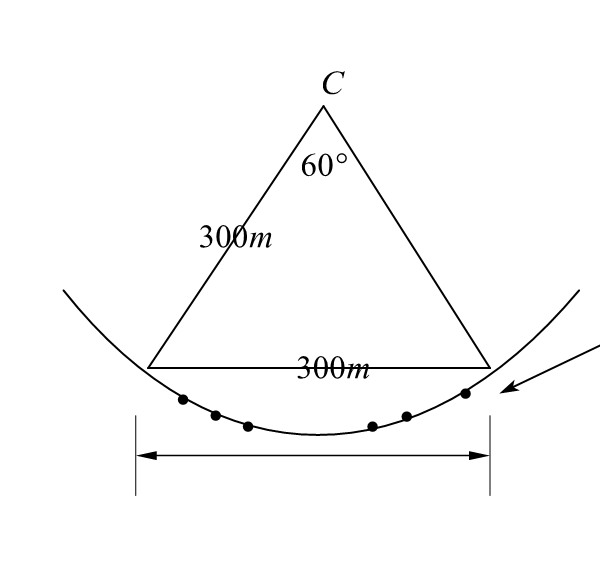
此外为了方便做优化,我们需要处理的数据点可以通过特殊的等边三角形去筛选,也就是圆锥截取球面:

建立模型
https://mianbaoduo.com/o/bread/YZ2Vm5Zx面包多
求解算法
https://mianbaoduo.com/o/bread/YZ2Vm5Zx面包多
结果展示(附代码)
https://mianbaoduo.com/o/bread/YZ2Vm5Zx面包多
购买即可开启订阅