前言: RAII是资源获得即初始化, 是一种利用对象生命周期来控制程序资源地手段。 智能指针是在对象构造时获取资源, 并且在对象的声明周期内控制资源, 最后在对象析构的时候释放资源。注意, 本篇文章参考——C++ 智能指针 - 全部用法详解-CSDN博客
看完博主的文章的友友们, 可以去看一下该篇文章, 该作者写的比博主通俗易懂。
目录
为什么需要智能指针
智能指针
auto_ptr
auto_ptr的用法:
auto_ptr的模拟实现:
unique_ptr
unique_ptr的用法
unique_ptr的模拟实现
shared_ptr
shared_ptr的用法
shared_ptr的模拟实现(v1版本)
weak_ptr
weak_ptr的用法:
weak_ptr的模拟实现
shared_ptr中的定制删除器
智能指针坑点
为什么需要智能指针
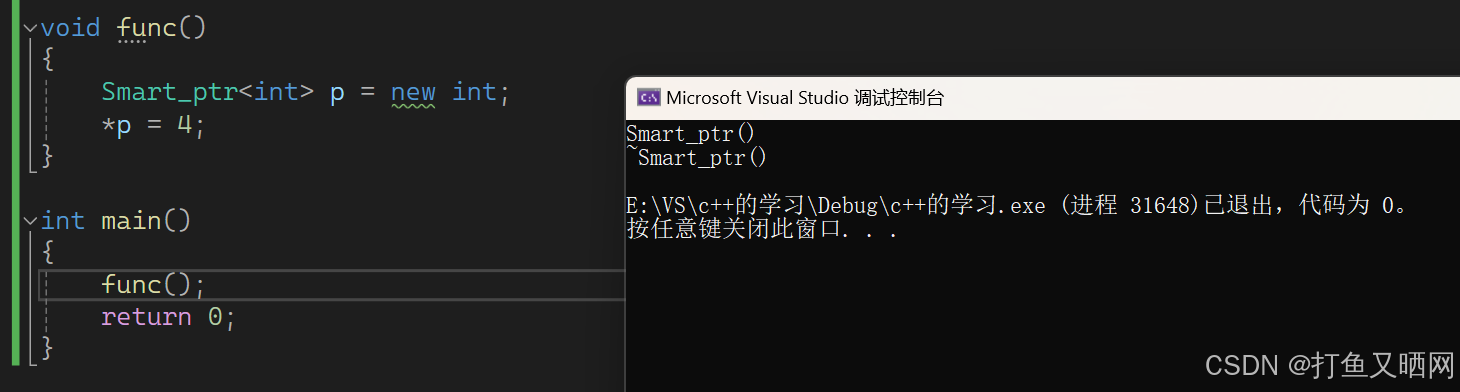
首先我们来看一下这一个简单的程序:
void func() {int* p = new int;}int main() {func();return 0;}在这个程序里面, func中定义了一个指向堆区一块空间的p。 但是当出了作用域后, p指针就被销毁了, 但是p指针指向的空间没有被销毁,这个时候就发生了内存泄漏。
另外一种情况就是我们虽然手动释放了内存, 但是中途发生了异常, 程序发生跳转, 手动释放内存被截胡了。 也会导致发生内存泄漏。
void test() {int* ptr = new int;if (1) {throw "发生异常"; //这里发生截胡, 无法走到下一行。}delete ptr; //这里没有释放资源}int main() {try {test();}catch (const char* str){cout << str << endl;}catch (...) {cout << "未知异常" << endl;}return 0;}而只能指针就是为了这种情况设计出来的。也就是说, 智能指针就是为了我们能够方便管理动态内存分配的资源, 它能够在对象的声明周期结束时自动释放这些资源。
如图为一个简单的智能指针
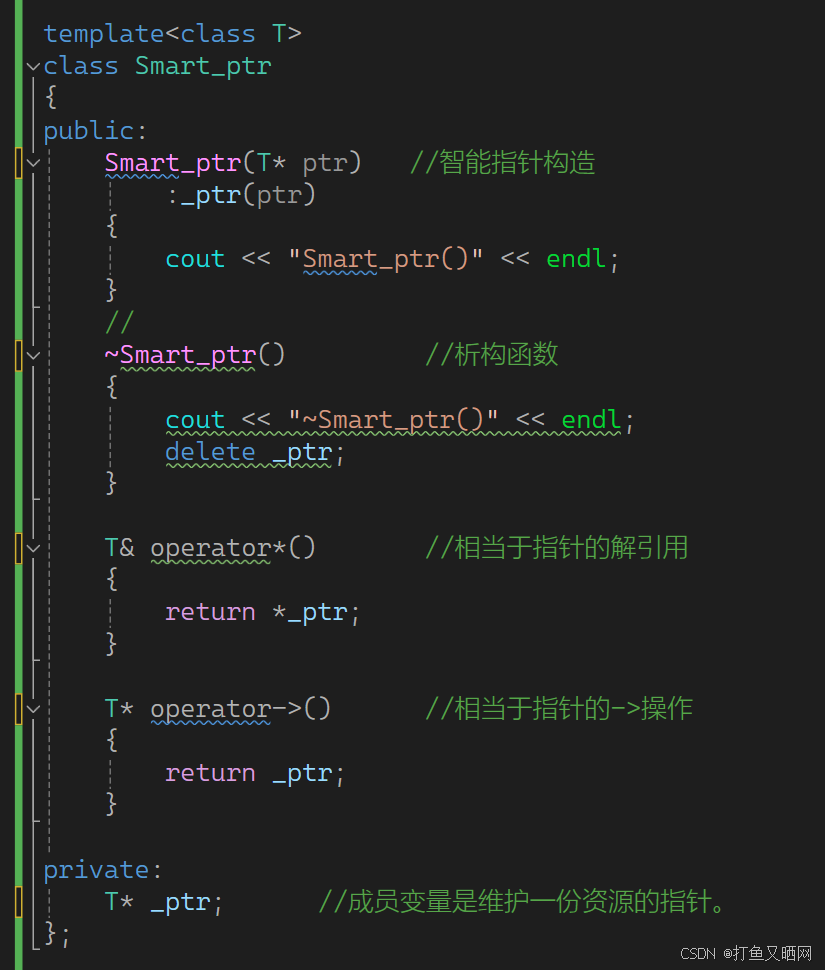
在这个智能指针当中, 当我们创建对象时,可以使用一块资源初始化。 然后这块资源就会在这个对象的生命周期结束时自动销毁。
这就是智能指针的基本原理, 虽然我们使用指针时, 指针指向的空间不会被自动释放。但是对象在生命周期结束时会自动释放, 所以我们把指针指向的资源放到对象里, 让对象在释放自身的时候将资源一起释放掉。
智能指针
现在有三个智能指针的解决方案:
auto_ptr C++98 unique_ptr C++11 share_ptr C++11另外, 还有一个用来解除share_ptr中的循环引用问题的解决方案。
wake_ptr C++11auto_ptr
auto_ptr的用法:
使用智能指针需要包含头文件memory, 具体使用方法如下:
#include<memory> //只用智能指针需要包含memory头文件int main() {auto_ptr<int> p(new int); //利用auto_ptr创建一个管理int指针资源的对象auto_ptr<list<int>> pl(new list<int>); //利用auto_ptr创建一个管理list<int>类型的指针资源的对象*p = 4; //auto_ptr<int>类型也能进行解引用操作(*pl).push_back(16); //容器的指针, 解引用后就是容器本身。(*pl).push_back(15);(*pl).push_back(14);(*pl).push_back(13);(*pl).push_back(12);cout << *p << endl; //打印*pauto it = (*pl).begin(); //pl解引用获得list<int>对象, 可以像使用指针while (it != (*pl).end()) {cout << *it << endl;++it;}return 0;}这里创建智能指针对象是: auto_ptr<类型名> p(new 类型名) , 这里创建的时候不能使用 ’ = ‘, 只能使用 ' ( ) ';
auto_ptr是在C++98创建出来的, 但是这个智能指针在之后很少被人用。 因为它有一个弊端, 就是当进行拷贝的时候, 该智能指针管理的资源会被 ”抛弃“, 另一个智能指针进行接收。 也就是如图:
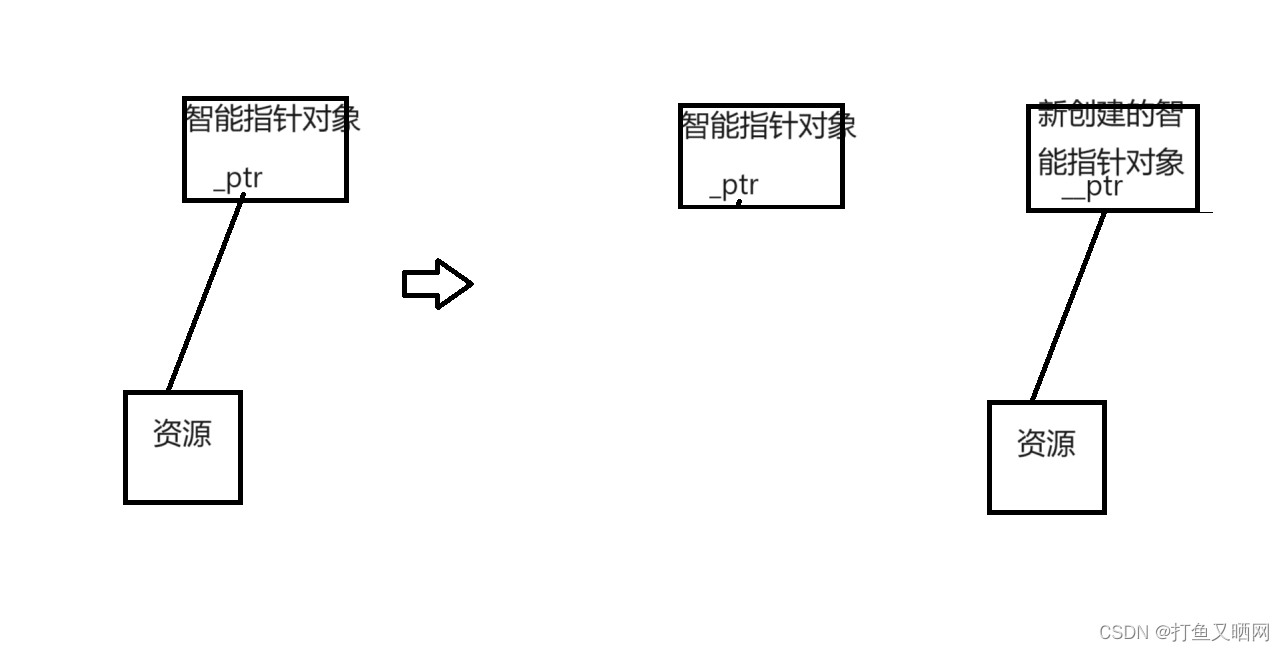
这个模式存在一些弊端。如果我们使用一个容器进行插入操作的时候,插入操作一定会赋值。 那么赋值就会导致原本智能指针对象中的资源被转移。
另外, auto_ptr的另一个弊端就是auto_ptr不支持对象数组的操作。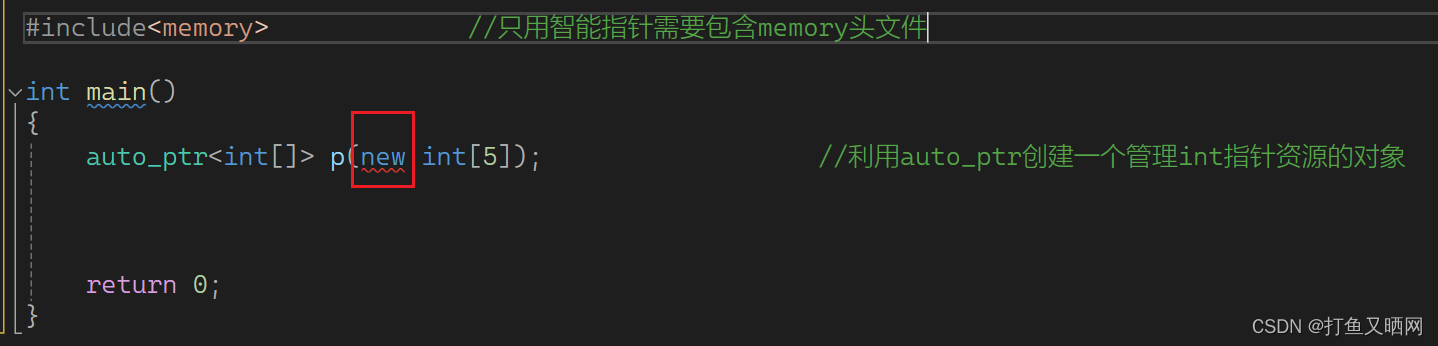 所以在C++11出现更好的unique_ptr和share_ptr后,auto_ptr已经很少被使用。
所以在C++11出现更好的unique_ptr和share_ptr后,auto_ptr已经很少被使用。
auto_ptr有三个常用接口。 get, release, reset。
三个函数的主要功能
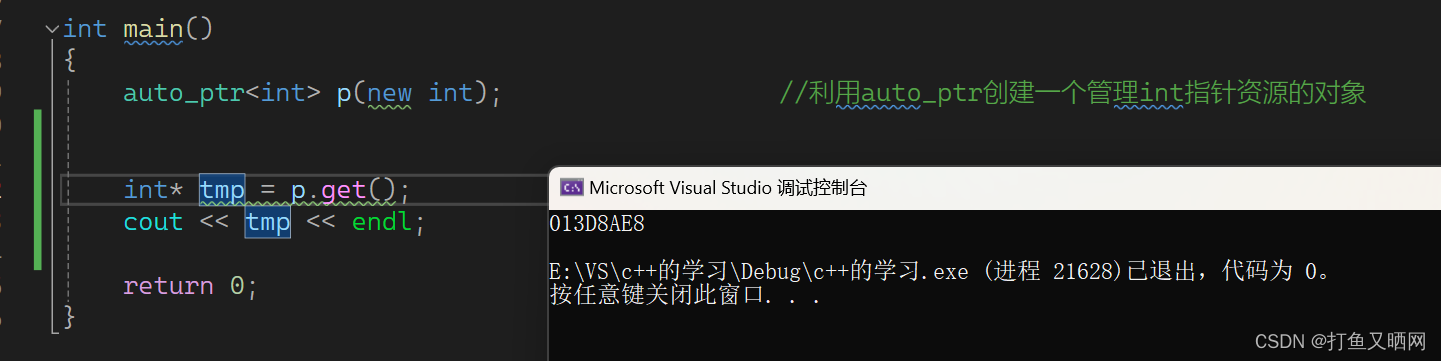
1. get()
get是获取对象中管理的资源:
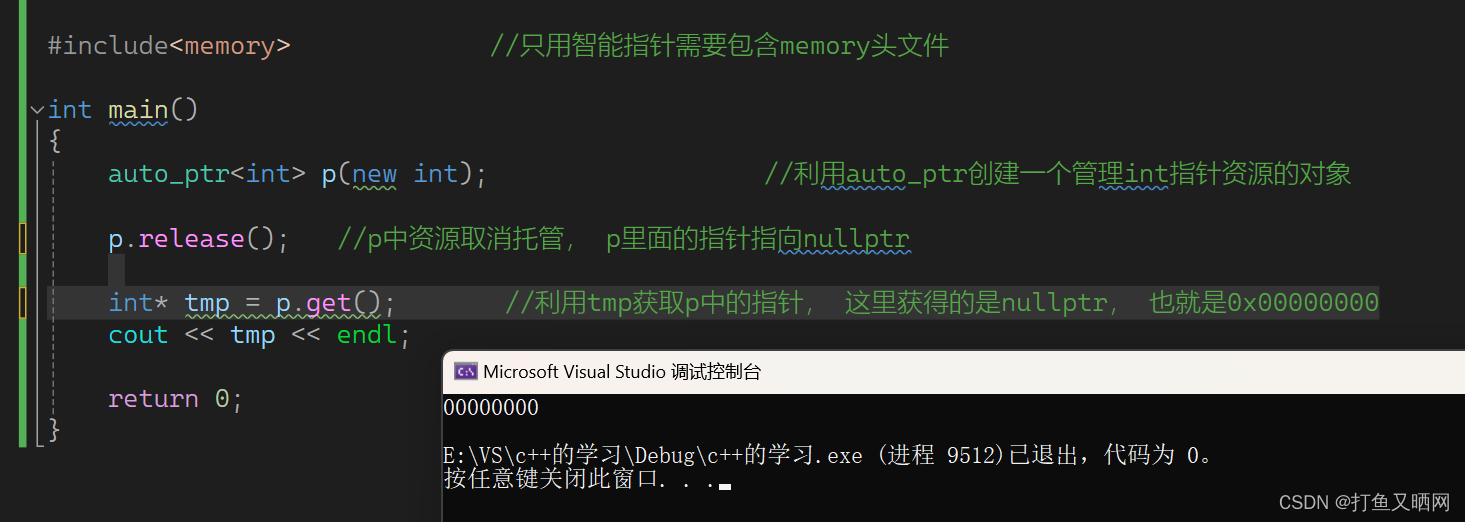
2.release
release, 是取消对象中管理的资源:
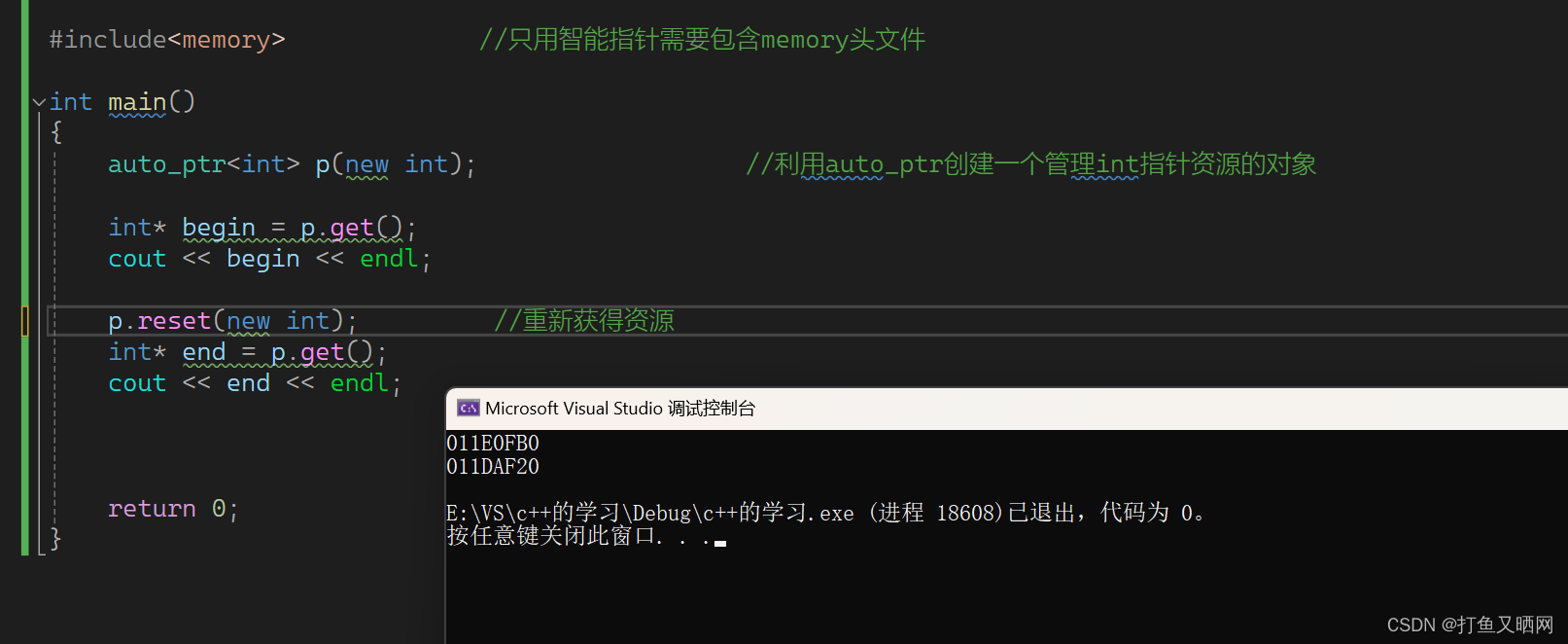
3.reset
reset, 是重新分配对象中管理的资源:
auto_ptr的模拟实现:
//首先, 对于智能指针来说,他们的模板类名是这样的:
template<class T> //模板类, 可以接收T类型的资源class auto_ptr //智能指针类名{ };//然后, 在类里面定义资源类型的指针, 用来维护这块资源:
template<class T>class auto_ptr{private:T* _ptr; //T类型资源的指针, 用来维护一块资源};//所有智能指针的构造都是一样的, 就是使用一块资源交给智能指针里面的指针变量进行维护。
auto_ptr(T* ptr):_ptr(ptr){}//auto_ptr的拷贝构造, 其实就是把一个智能指针管理的资源 “抛弃”,然后另一个智能指针进行接收。 至于这样做的弊端, 上面已经提到过, 这里不赘述。
auto_ptr(auto_ptr<T>& ptr):_ptr(ptr._ptr) {ptr._ptr = nullptr;}//最重要的就是智能指针的销毁, 销毁时, 要将管理的资源一块释放掉, 代码如下:
~auto_ptr() {delete _ptr;_ptr = nullptr;}//然后智能指针还要像普通指针一样能够进行基本运算——加加, 减减, 解引用等。那么就要重载这些运算符, 如下图:
T& operator*() //解引用{return *_ptr;}T* operator->() //箭头{return _ptr;}auto_ptr<T> operator++() //加加重载{++_ptr;return *this;}unique_ptr
unique_ptr的用法
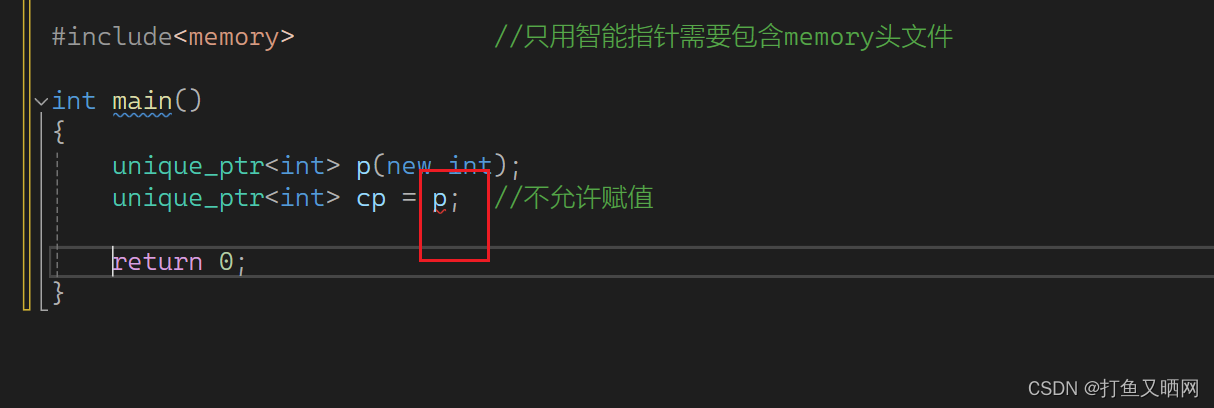
unique_ptr相交于auto_ptr更加严谨, 它相对于auto_ptr做了一下改变:
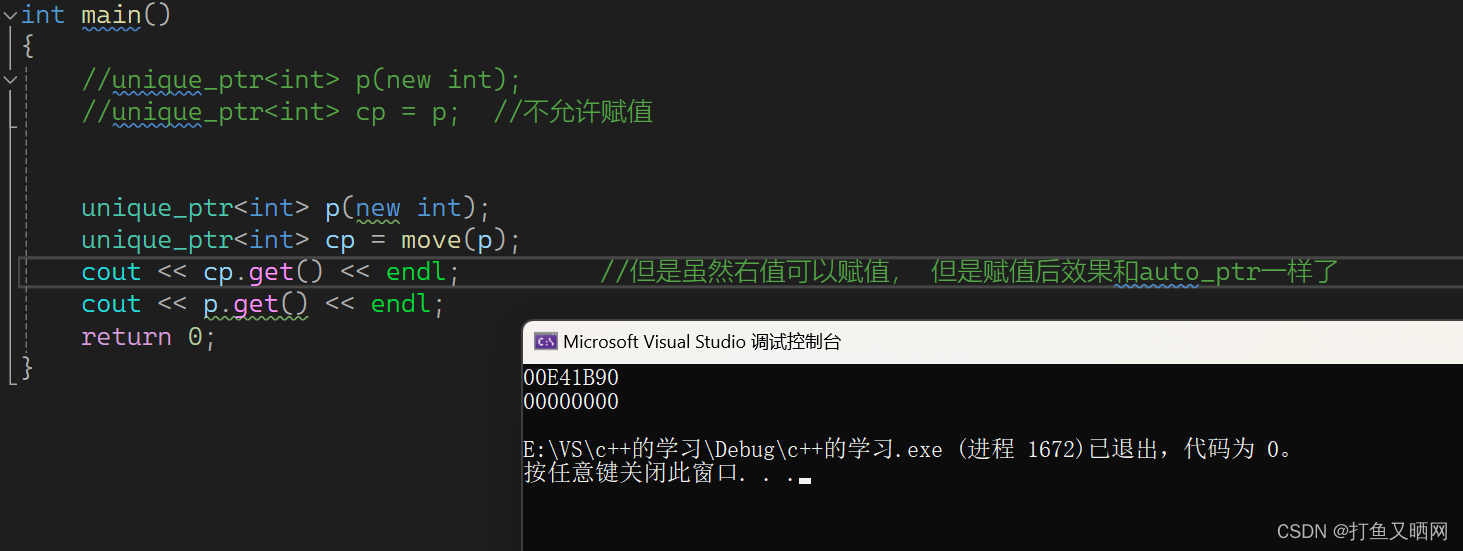
两块指针不能指向同一块资源(否则在释放空间时多次释放空间报错)。 同时它也不能赋值(注意, 右值可以赋值,但是右值赋值后, 如果该右值为一个左值临时转化的, 那么使用赋值后和auto_ptr的效果一样)
左值赋值:
右值赋值:
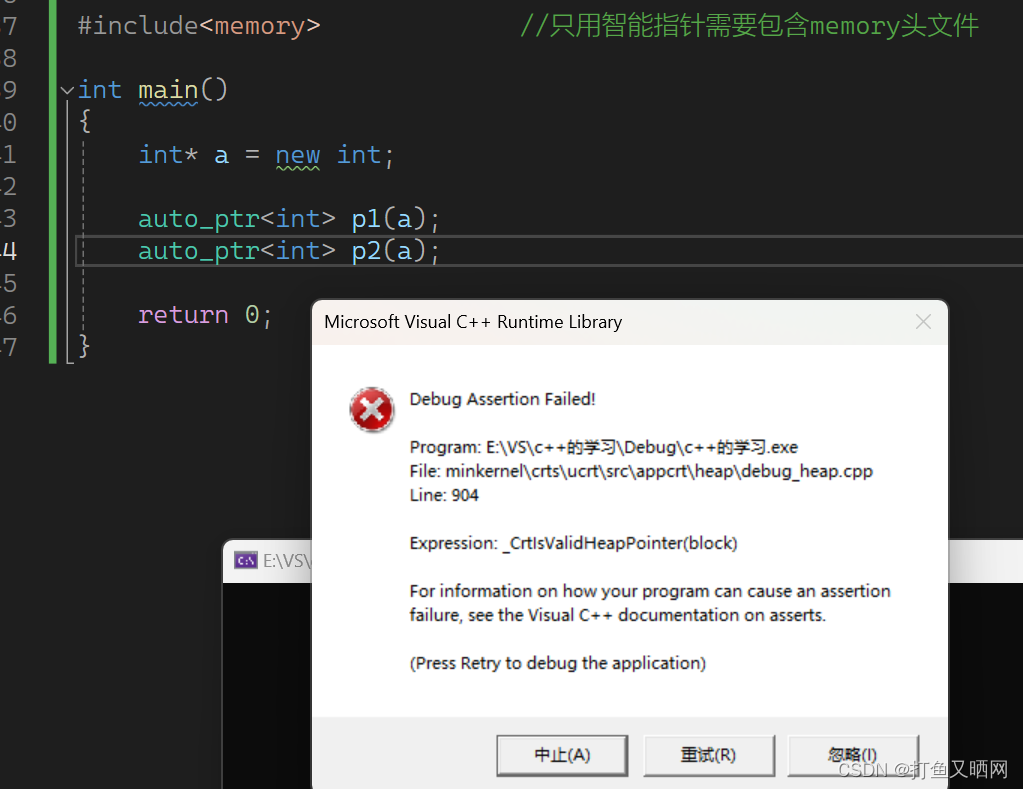
要注意的坑点就是不能一块资源给多个对象赋值, 不然会报错:
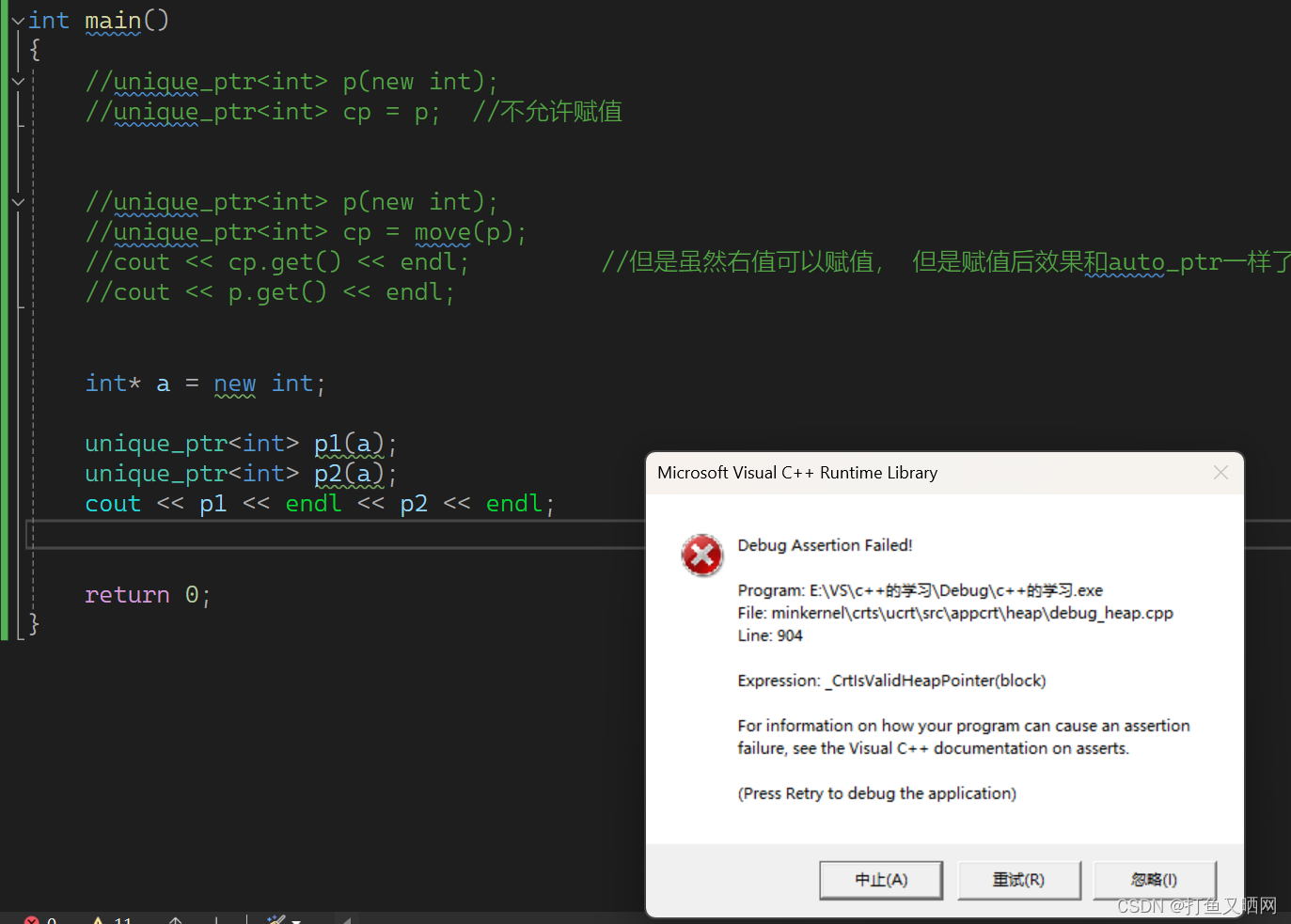
auto_ptr也一样
这是unique_ptr和auto_ptr中使用的坑。 后面的share_ptr解决了这个坑点(引用计数)
unique_ptr的模拟实现
有前面auto_ptr的基础, 这里unique_ptr的细节不再讲解, 只讲解重要的部分:
//首先模板类:
template<class T>class unique_ptr {private:T* _ptr; //管理资源};//然后就是主要的地方 , unique_ptr不能进行赋值, 所以要将拷贝构造和赋值重载封起来。
template<class T>class unique_ptr {public:unique_ptr(T* ptr):_ptr(ptr) {}private:unique_ptr(unique_ptr<T>& ) = delete; //将拷贝构造删掉unique_ptr<T>& operator=(unique_ptr<T>& ) = delete; //将赋值重载删掉private:T* _ptr;};shared_ptr
shared_ptr的用法
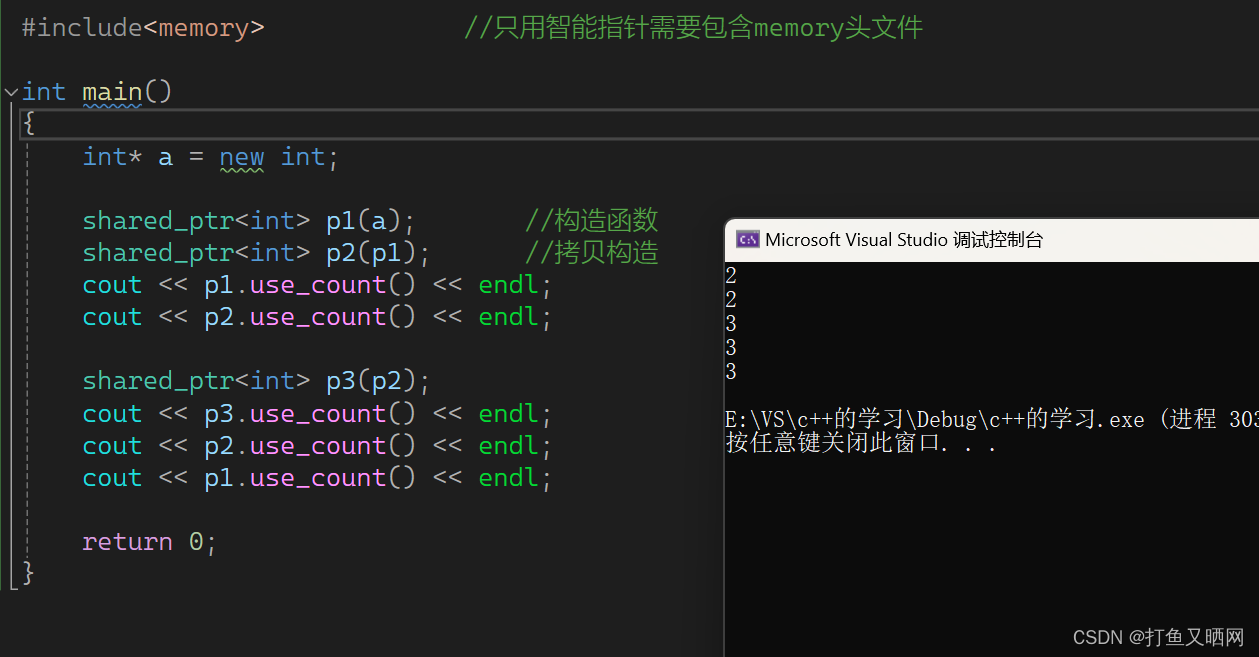
shared_ptr解决了unique_ptr和auto_ptr的排他性, shared_ptr即使多个智能指针指向同一块空间也能正常工作。
shared_ptr采用了引用计数, 当一个新的share_ptr指针管理一块资源的时候, 引用计数就+1, 当一个shared_ptr指针过期时, 引用计数就-1。当一块资源的引用计数到0时, 这块资源就可以被释放。
1. use_count() : 获得当前资源的引用计数:
2.conductor: 有多种构造形式——直接赋值一块资源、 赋值一块数组资源、传送定制删除器。
定义如下:
//带有定制删除器
template<class U, class D>shared_ptr(U* p, D del)//普通构造
template<class U>shared_ptr(U* p)//数组构造
shared_ptr<T[]> p(new T[5]{1, 2, 3, 4, 5}); //据说是C++17后支持, 但是vsC++14也能跑3.make_shared
make_shared可以用来分配一块空间并且初始化这块空间, 效率更加高效。make_shared是一个函数模板, 并且需要指定分配资源的类型, 如图:

shared_ptr的模拟实现(v1版本)
首先,类名, 解引用之类和其他智能指针相差不大, 这里不做赘述, 然后有区别的就是成员变量以及构造, 拷贝, 赋值。
首先看成员变量, 成员变量需要有一块空间来作为引用计数。
template<class T>class shared_ptr {private:T* _ptr;int* _pcount;};*_pcount作为引用计数。
//构造
//引用计数ptrshared_ptr(T* ptr):_ptr(ptr) {*_pcount = 1;}//拷贝构造
//引用计数地拷贝构造shared_ptr(shared_ptr<T>& ptr) :_ptr(ptr._ptr),_pcount(ptr._pcount){++(*_pcount);}//析构
~shared_ptr() {if (--(*_pcount) == 0) {delete _ptr;delete _pcount;}}赋值, 这里赋值要先将原本的管理的资源取消托管, 那么引用计数就要减一, 还要判断引用计数是否为0, 为0就要释放资源。
shared_ptr<T>& operator=(shared_ptr<T>& p) {if (_ptr != p._ptr) //如果不判断, 当自己给自己赋值的时候, 自己会先将自己的资源释放, 然后就变成了野指针。 自己再给自己赋值一个野指针。 就会报错。{if (--(*_pcount) == 0){delete _ptr;delete _pcount;}//_ptr = p._ptr;_pcount = p._pcount;++(*_pcount);}return *this;}shared_ptr中的坑
1. 其实, shared_ptr还有一种情况同样具有排他性, 和unique_ptr、auto_ptr一样, 当没有调用拷贝构造, 而是直接使用构造函数的时候, 引用计数不回加一, 那么就会多次释放资源。 这个无法避免。
2.第二个坑就是循环引用的问题,为了方便观察, 我们使用我们自己定义的shared_ptr进行测试, 现在看如下一个例子:
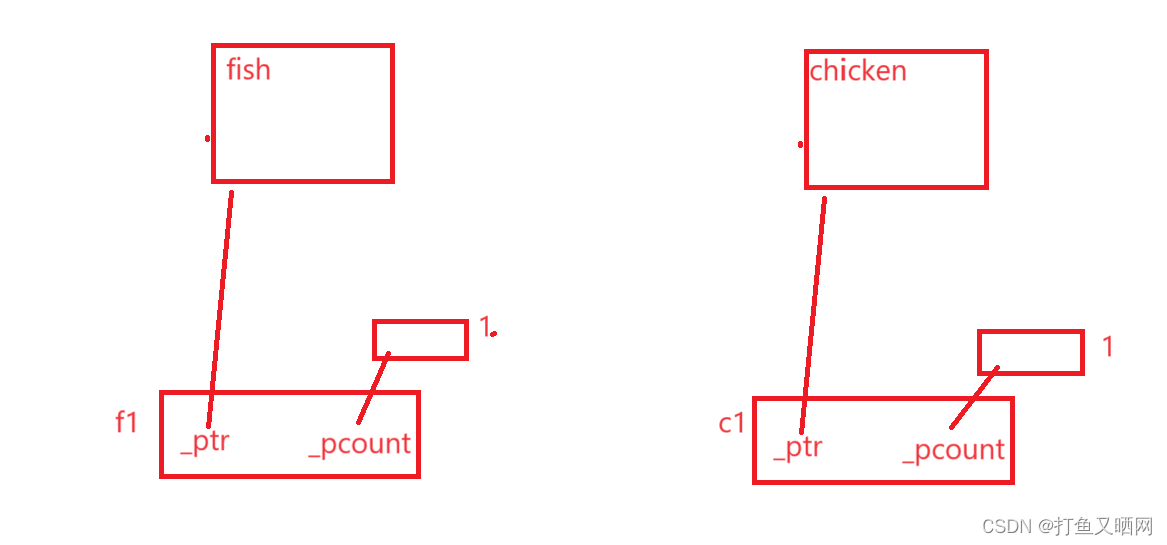
#include"share_ptr.h" //自己写的shared_ptr头文件struct chicken; //前置声明struct fish //定义一个鱼类对象, 里面有一个鸡的智能指针实例{cws_RAII::shared_ptr<chicken> _chicken;};struct chicken //定义一个鸡类对象, 里面有一个鱼的智能指针实例。{cws_RAII::shared_ptr<fish> _fish; };int main(){cws_RAII::shared_ptr<fish> f1(new fish);cws_RAII::shared_ptr<chicken> c1(new chicken);(*f1)._chicken = c1;//(*c1)._fish = f1;return 0;}在当前状态下, 我们如果运行程序, f1的资源和c1的资源可以被释放
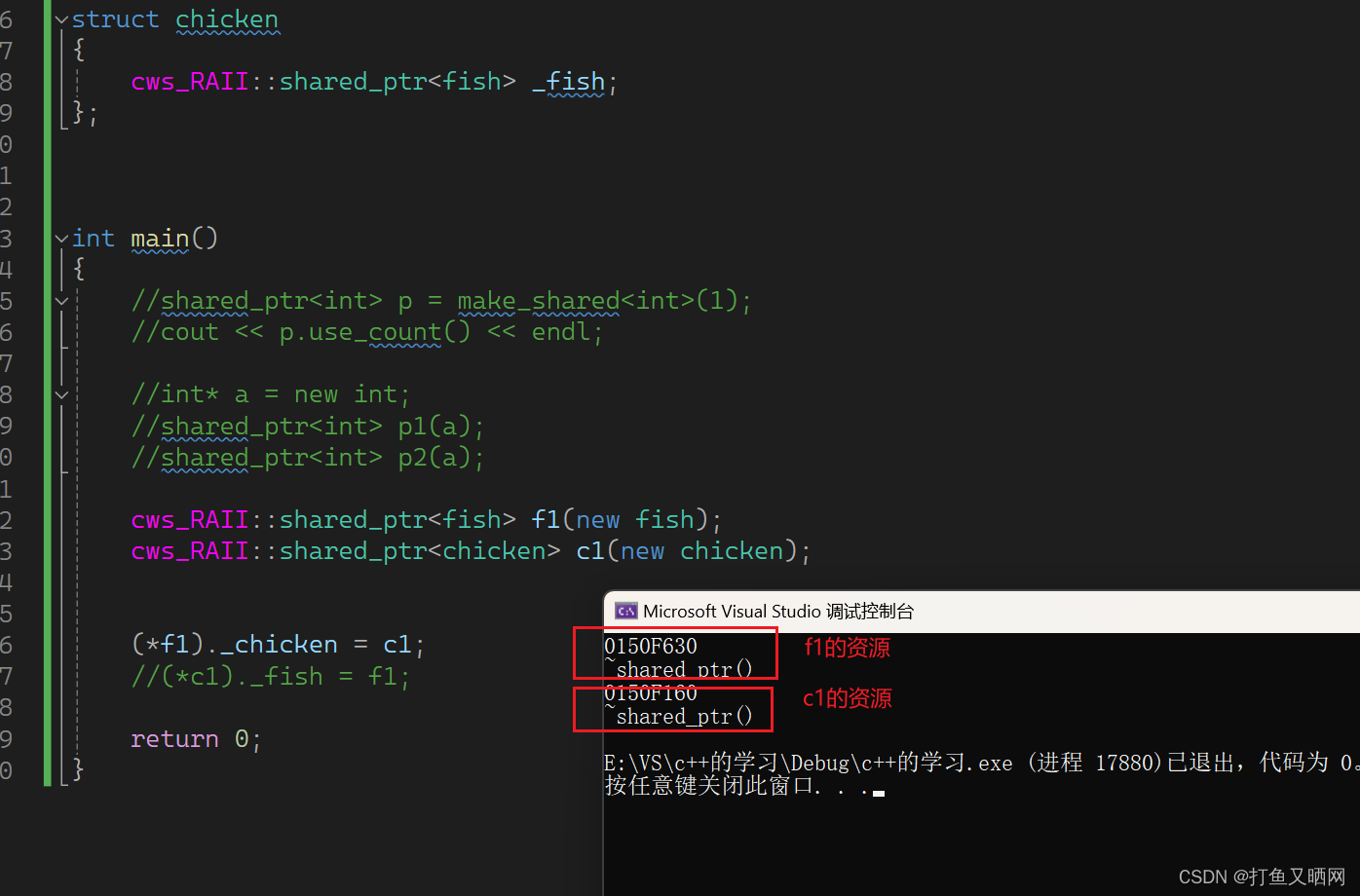
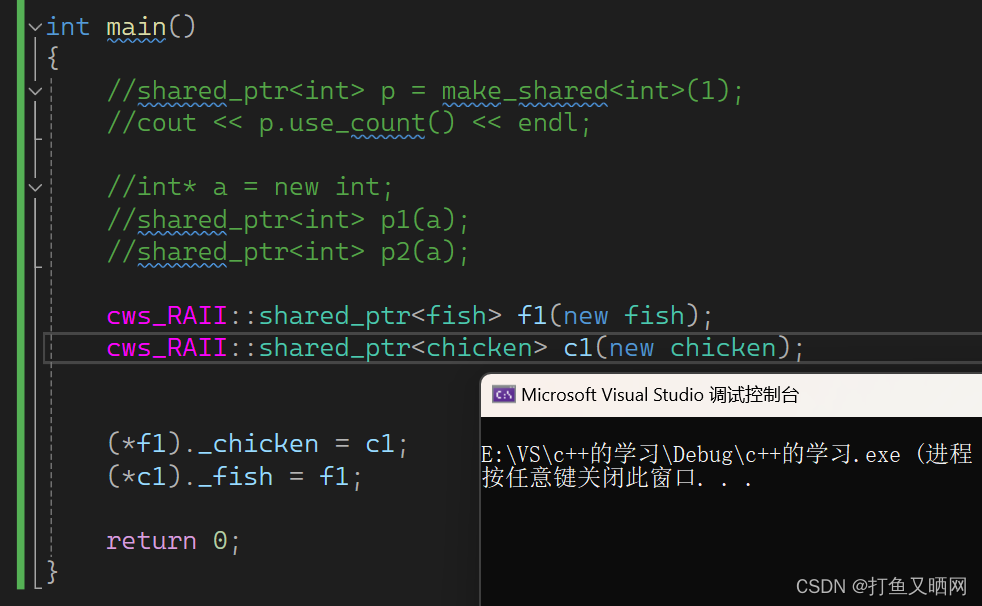
但是如过图中(*c1)._fish = f1取消注释, 那么f1的资源和c1的资源就不能被释放。
这是为什么?
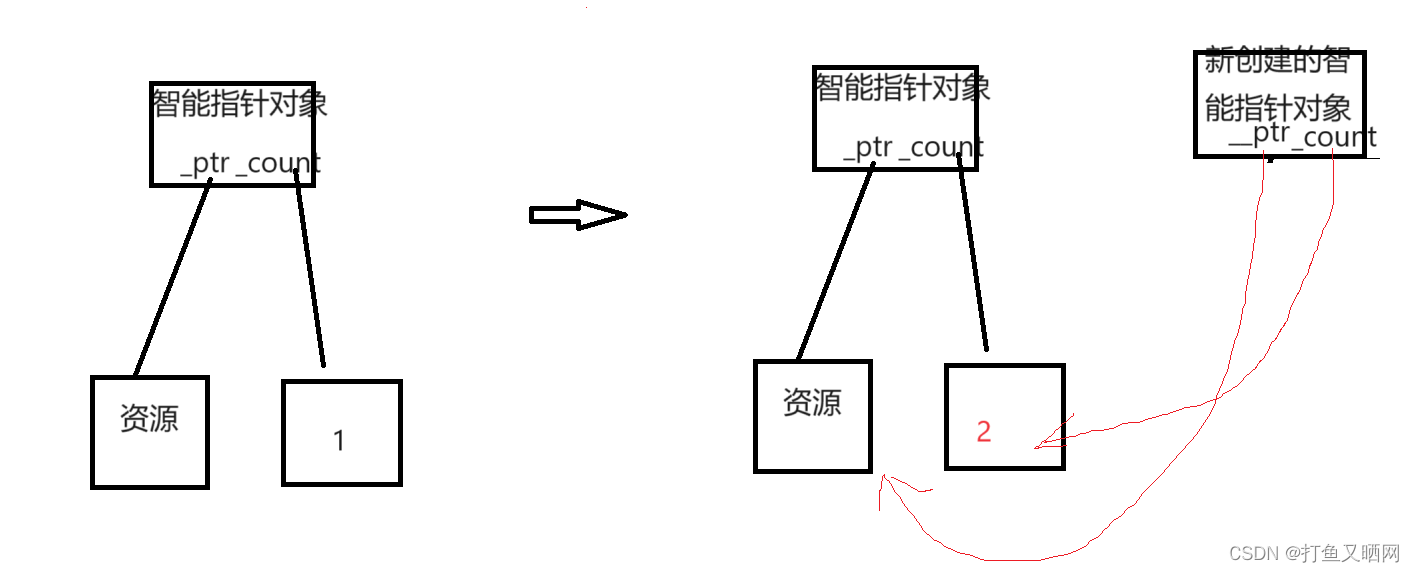
其实, 这就是循环引用的问题。 在这里面, 如果只定义了f1和c1. 这个时候是这样的:
但是如果给执行两条赋值语句后, 就变成了这样:
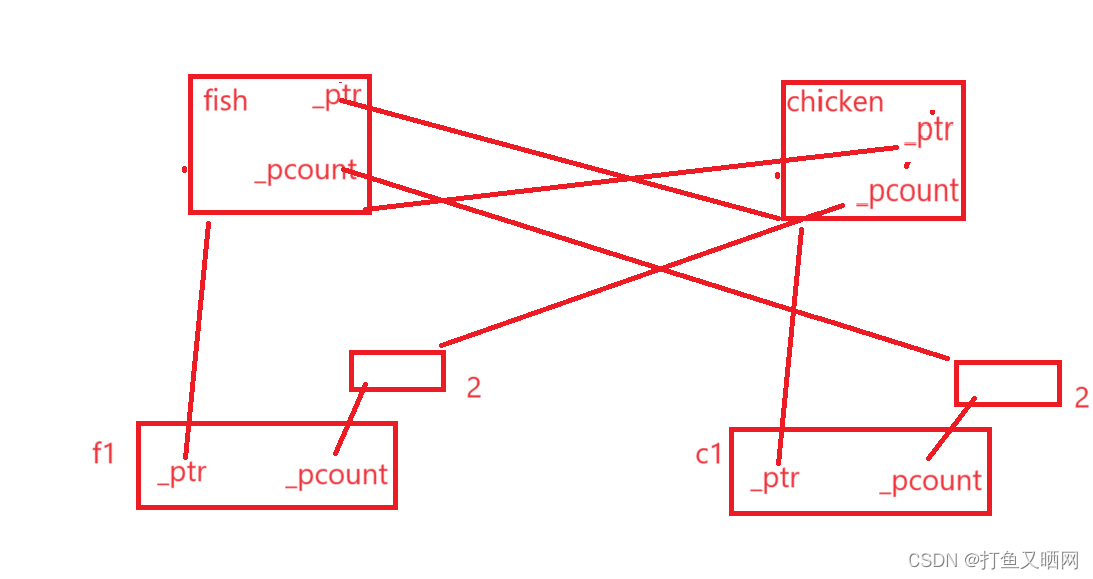
这个时候当f1和c1的生命周期结束时, f1的_pcount--, c1的_pcount--。 这两个_pcount都只能变成1, 变不成0, 所以不能释放资源。
所以, 我们在使用shared_ptr时, 要避免交叉赋值的情况。否则会出现内存泄漏。
weak_ptr
weak_ptr是用来解决shared_ptr的循环引用问题。 当两个类需要交叉进行赋值的时候, 类中所定义的智能指针可以使用weak_ptr(原本使用shared_ptr), 因为weak_ptr不会增加资源的引用计数。
weak_ptr的用法:
weak_ptr本人觉得最重要的一点就是可以和shared_ptr进行相互转化:
int main(){shared_ptr<fish> f2(new fish);weak_ptr<fish> f3(f2); //将一个shared_ptr给给f3f3 = f2; //将shared_ptr赋值给weak_ptrf2 = f3.lock(); //将一个weak_ptr使用lock接口转化为shared_ptr; return 0;}同时, 还可以构造出一个空指针:
int main(){weak_ptr<fish> f3; //构造一个空指针 return 0;}但是, wear_ptr不支持解引用以及->
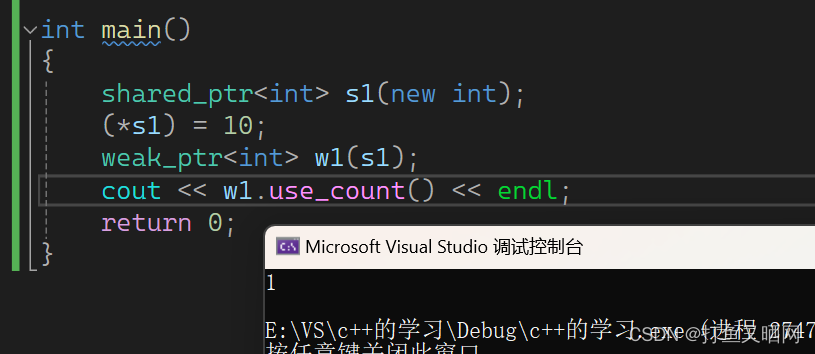
weak_ptr也能使用use_count函数查看引用计数:
weak_ptr的模拟实现
template<class T>class weak_ptr {public://不支持RAII, 也就是不能初始化管理资源weak_ptr(const shared_ptr<T>& ptr) {_ptr = ptr._ptr;//这里可以将weak_ptr弄成shared_ptr的友元, 就能访问私有_ptr_pcount = ptr._pcount;}weak_ptr<T>& operator=(const shared_ptr<T>& ptr) {_ptr = ptr._ptr;_pcount = ptr._pcount;return *this;}int use_count() {return (*_pcount);}T* get() {return _ptr;}private:T* _ptr;int* _pcount;};shared_ptr中的定制删除器
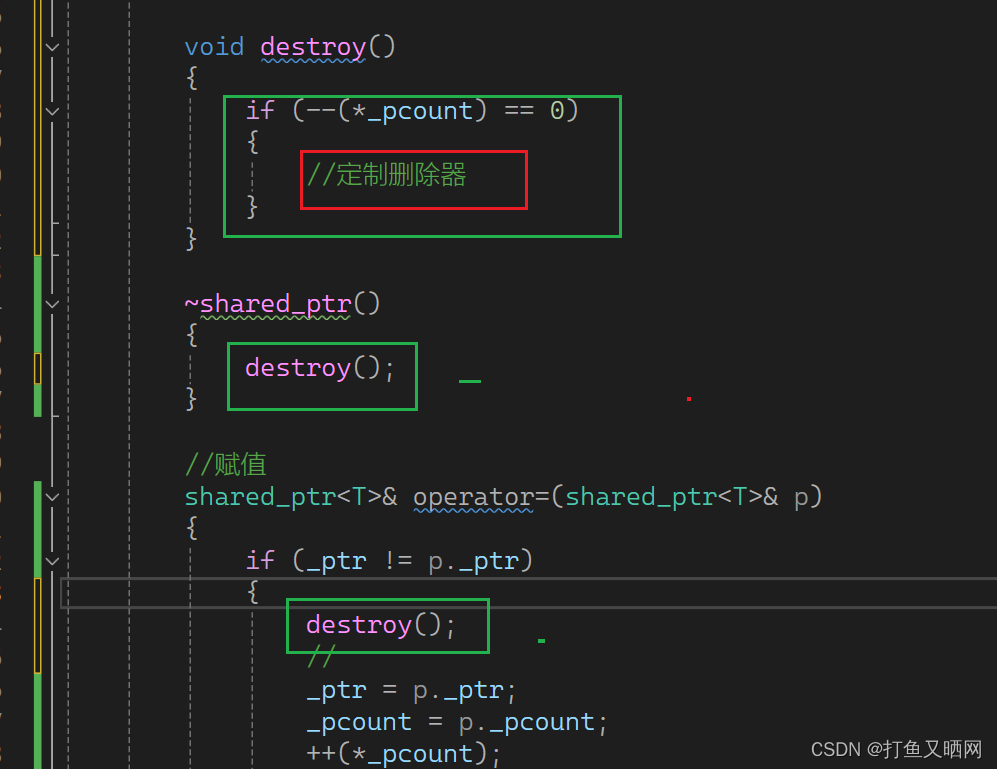
在shared_ptr中, 可以管理一块连续的数组空间, 也可以管理一个单独的一块空间。 这两种资源类型需要不同的销毁方法。 单独的使用delete, 而数组空间需要使用delete[], 库里面的默认是使用delete, 但是如果我们想使用delete[]来销毁一块数组空间。 或者我们使用shared_ptr管理一块文件, shared_ptr生命周期结束时关闭文件。 那么就需要我们自己传一个定制删除器。
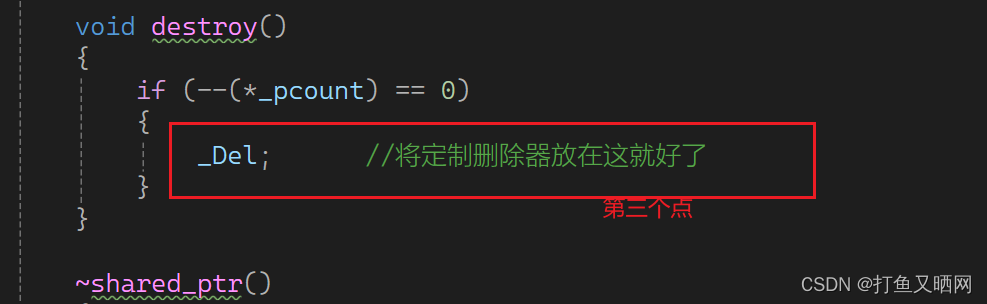
定制删除器是放在如图所示红框框的代码块中:
定制删除器的用法:

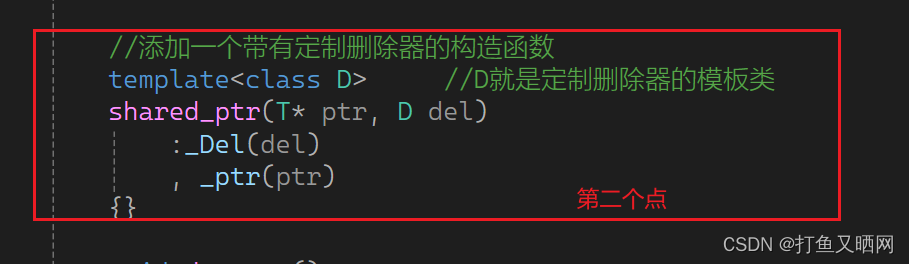
如何实现定制删除器?
其实定制删除器就是添加一个模板类, 如图:

 下面是shared_ptr完整的版本(v2)
下面是shared_ptr完整的版本(v2)
template<class T>class shared_ptr {public://引用计数ptrshared_ptr(T* ptr = nullptr):_ptr(ptr) ,_pcount(new int(0)){if (_ptr != nullptr) {*_pcount = 1;}}//引用计数地拷贝构造shared_ptr(shared_ptr<T>& ptr) :_ptr(ptr._ptr),_pcount(ptr._pcount){++(*_pcount);}//添加一个带有定制删除器的构造函数template<class D> //D就是定制删除器的模板类shared_ptr(T* ptr, D del):_Del(del), _ptr(ptr) {}void destroy() {if (--(*_pcount) == 0) {_Del; //将定制删除器放在这就好了}}~shared_ptr() {destroy();}//赋值shared_ptr<T>& operator=(shared_ptr<T>& p) {if (_ptr != p._ptr) {destroy();//_ptr = p._ptr;_pcount = p._pcount;++(*_pcount);}return *this;}T* operator->() {return _ptr;}T& operator*() {return *_ptr;}T* _ptr;int* _pcount;function<void(T*)> _Del = [](T*) {delete _Del};};智能指针坑点
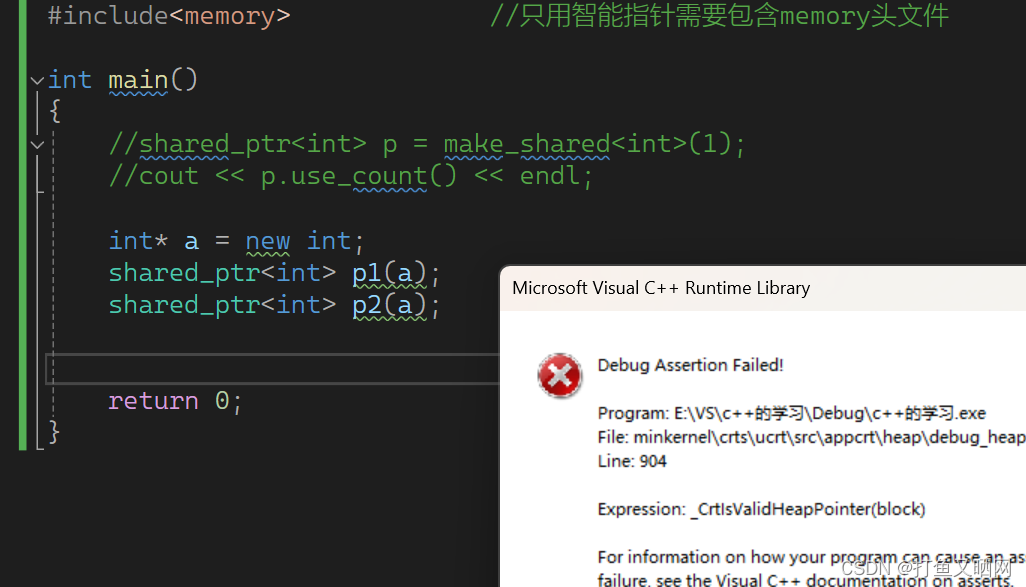
在看完大佬们的博客之后, 本人也总结了一些智能指针的 “坑点“, 这个坑点其实都是围绕 原生指针 展开的。
第一个:原生指针不能用来初始化智能指针, 否则两个智能指针指向同一块资源, 引用计数不增加。智能指针过期时会报错
第二个:get获得的原生指针, 不能delete掉, 否则智能指针在过期后还会delete。会报错
第三个:get获得的原生指针,也是原生指针, 不能初始化另一个智能指针。
第四个:release返回后的原生指针要被delete掉。 否则内存泄漏。
----以上, 就是本篇全部内容。