VS2022,OpenCV4.8.0
OpenCV下载地址:
Releases - OpenCV
用于个人学习记录
学习于B站up主OpenCV学堂
目录
VS2022,OpenCV4.8.0
1.VS环境配置
1.1配置包含目录
1.2配置库目录
1.3配置链接器
1.4配置环境变量
1.5练习使用的图像编辑
2.图像的读取与显示
2.1加载并显示一张图片
2.2窗口自由调整
2.3图像的读取方式
加载图像的灰度图
3.图像色彩空间转换
3.1色彩转化
3.2保存图像
3.3提取指定色彩范围区域inrange
4.图像对象Mat
4.1图像和矩阵的存储:
4.2多通道和深度:
4.3构造和初始化:
4.4数据访问:
5.图像像素的读写操作
6.图像的算术操作
7.TrackBar滚动条操作
8.键盘响应
9.颜色表操作
10.图像像素逻辑操作
11.通道分离与合
编辑
混合图像
12.像素值统计
13.几何形状绘制
14.随机数与随机颜色
15.多边形填充与绘制
16.鼠标操作与响应
17.图像像素类型转化与归一化
18.图像缩放与插值
19.图像翻转
20.图像旋转
21.视频文件/摄像头使用
22.视频处理与保存
23.图像直方图
24.二维直方图
25.直方图均衡化
原理:
步骤:
26.图像卷积操作
原理:
步骤:
27.高斯模糊
高斯模糊的原理:
高斯模糊的步骤:
28.高斯双边模糊
29.实时人脸检测
1.VS环境配置
创建C++空项目,配置OpenCV库
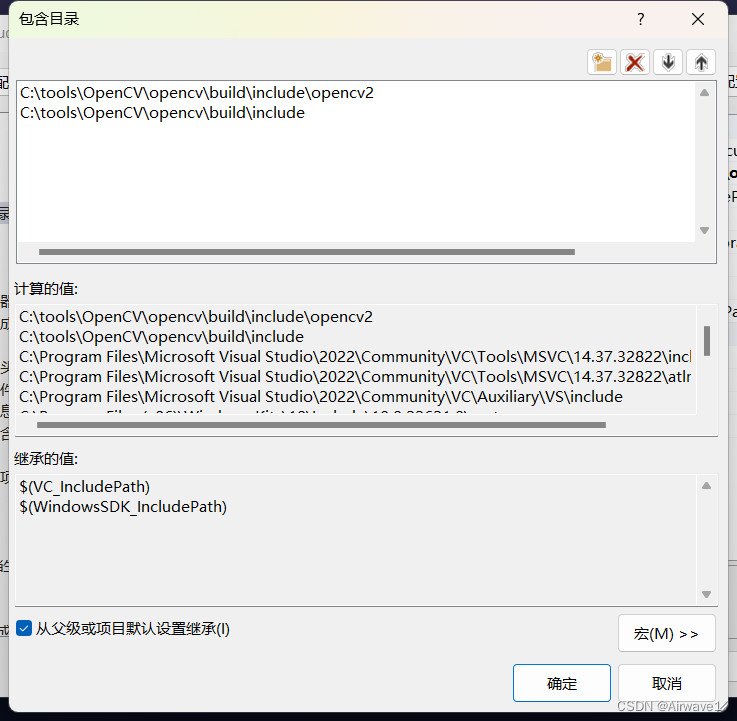
1.1配置包含目录
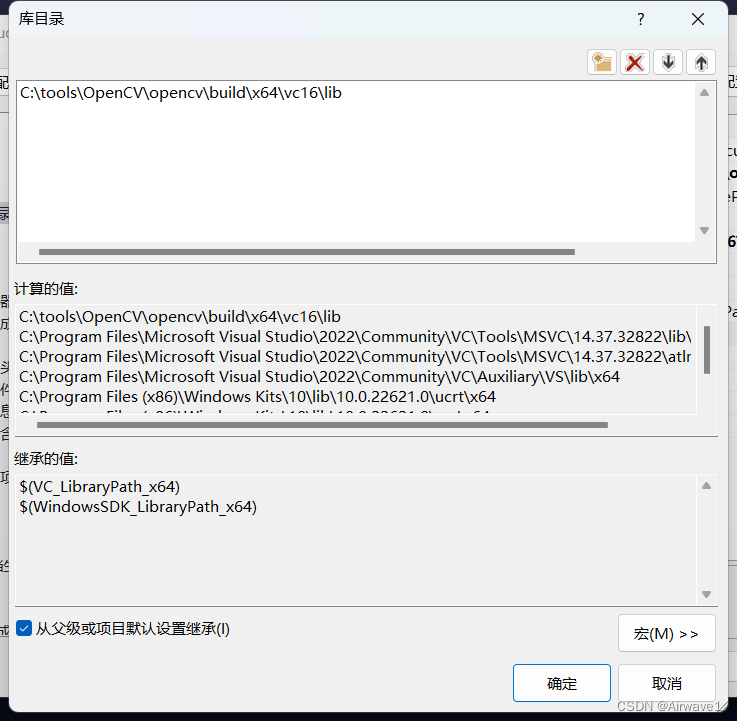
1.2配置库目录
1.3配置链接器
附加依赖项
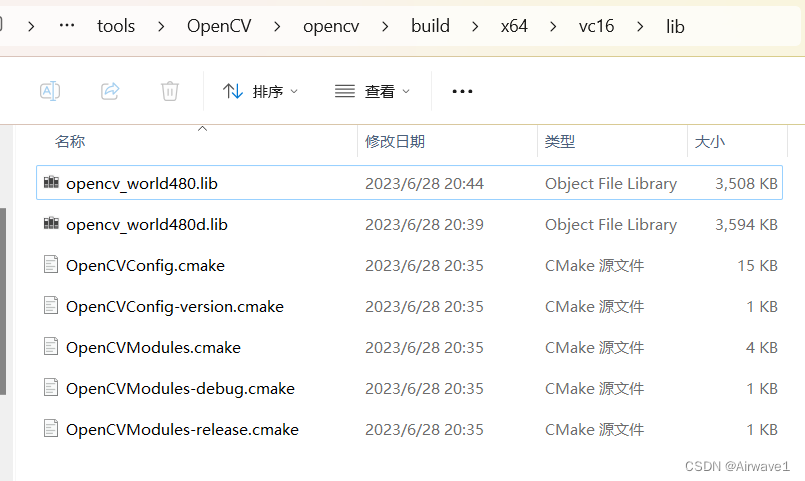
在Release下就选择 opencv_world480.lib
在Debug下就选择opencv_world480d.lib
两个不能同时添加

1.4配置环境变量

1.5练习使用的图像
2.图像的读取与显示
2.1加载并显示一张图片
Mat是矩阵,是OpenCV中的基本数据结构,用于存储图像数据,是一个多维数组,可以是一维、二维、三维等,用于存储图像的像素值,图像的宽、高、通道数等信息
#include <opencv2/opencv.hpp>int main(int argc, char** argv) {cv::Mat img = cv::imread("C:/Resources/image/tifa_1.jpg");// 读取图像if (img.empty()){std::cout << "Could not open or find the image" << std::endl;return -1;}cv::imshow("Image", img);// 显示图像,窗口名为"Image"cv::waitKey(0);// 等待按键,0表示无限等待return 0;}
2.2窗口自由调整
上面图片受限屏幕大小显示不完全
通过函数 namedWindow 来调整,让窗口大小可以自由调整
#include <opencv2/opencv.hpp>int main(int argc, char** argv) {cv::Mat img = cv::imread("C:/Resources/image/tifa_1.jpg");// 读取图像if (img.empty()){std::cout << "Could not open or find the image" << std::endl;return -1;}cv::namedWindow("Image", cv::WINDOW_FREERATIO);// 创建一个窗口,窗口名为"Image",窗口属性为自由比例cv::imshow("Image", img);// 显示图像,显示在"Image"窗口上cv::waitKey(0);// 等待按键,0表示无限等待。参数为等待时间,单位为mscv::destroyAllWindows();// 销毁所有窗口return 0;}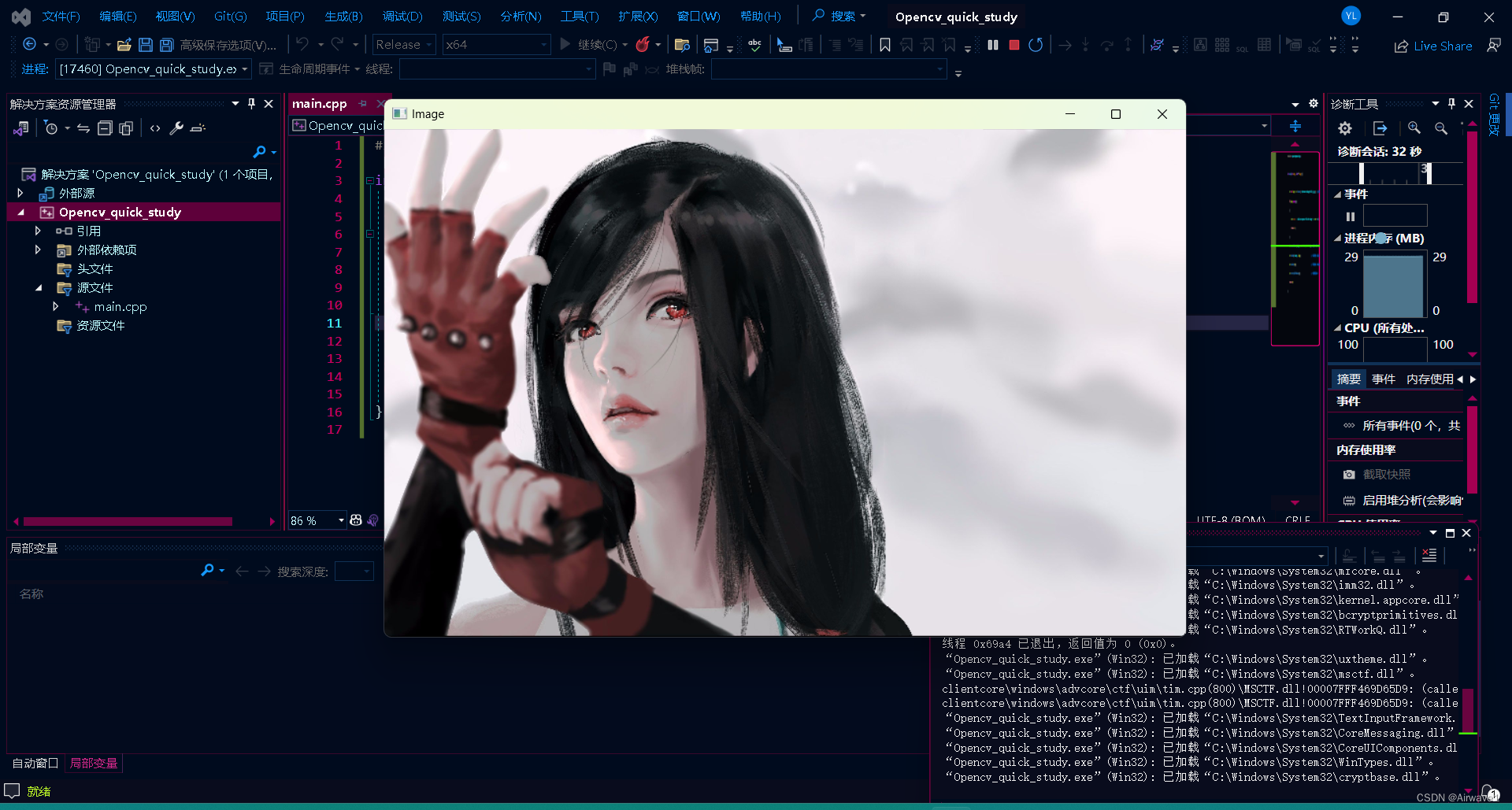
2.3图像的读取方式
图像的读取方式
IMREAD_UNCHANGED:读取原图像,包括alpha通道
IMREAD_GRAYSCALE:以灰度图像读取
IMREAD_COLOR:以彩色图像读取
IMREAD_ANYDEPTH:以原图像深度读取
IMREAD_ANYCOLOR:以原图像颜色格式读取
IMREAD_LOAD_GDAL:使用GDAL读取图像
IMREAD_REDUCED_GRAYSCALE_2:以1/2的灰度图像读取
IMREAD_REDUCED_COLOR_2:以1/2的彩色图像读取
IMREAD_REDUCED_GRAYSCALE_4:以1/4的灰度图像读取
加载图像的灰度图
cv::Mat img = cv::imread("C:/Resources/image/tifa_1.jpg",cv::IMREAD_GRAYSCALE);// 读取图像,参数为图像路径和读取方式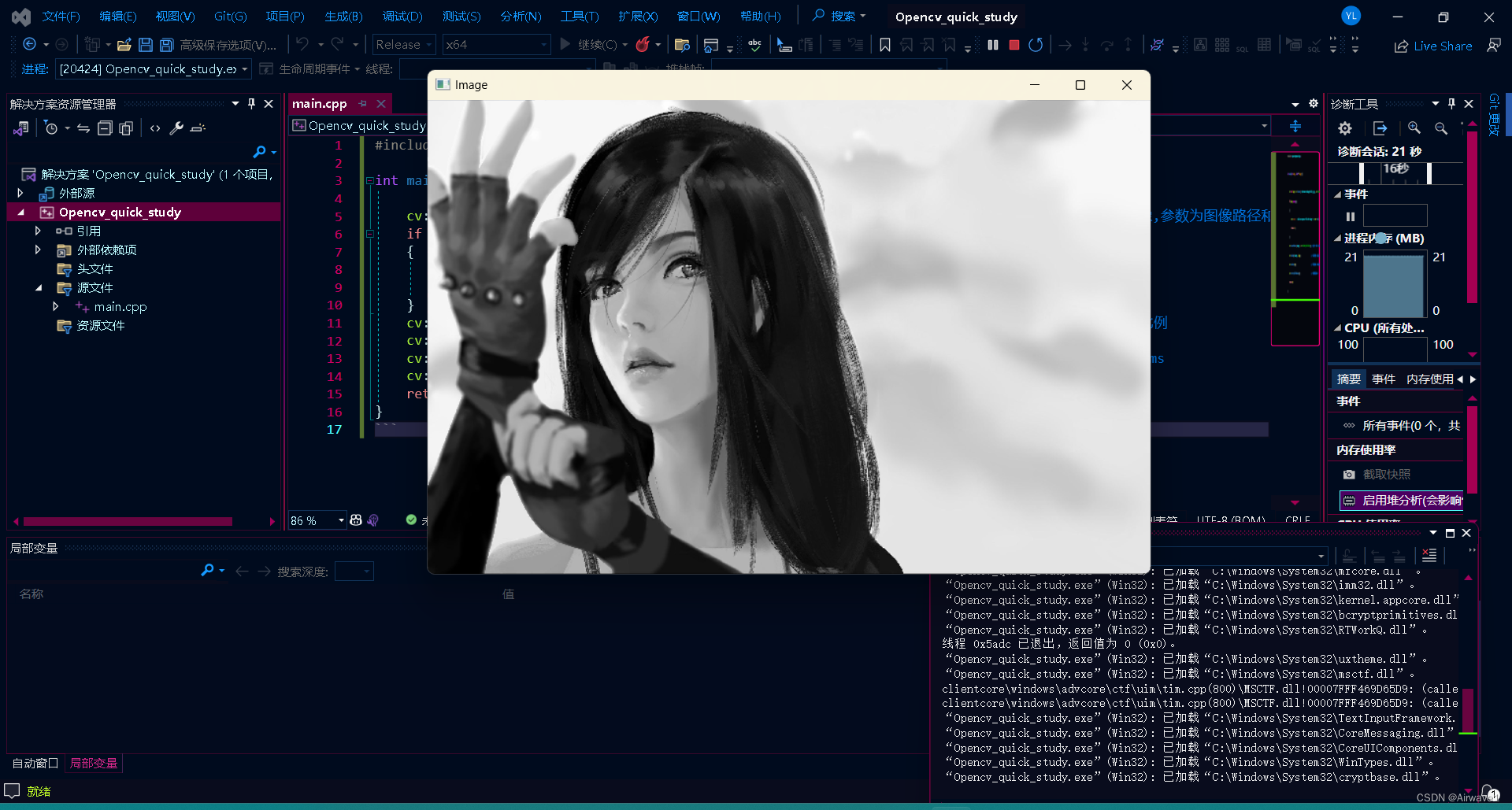
3.图像色彩空间转换
创建一个TestDemo来管理实现后续的功能
3.1色彩转化
#pragma once#include<opencv2/opencv.hpp>using namespace cv;class TestDemo{public:TestDemo();~TestDemo();void colorSpace_demo(Mat& image);// 颜色空间转换,传入图像引用};#include "TestDemo.h"TestDemo::TestDemo(){}TestDemo::~TestDemo(){}void TestDemo::colorSpace_demo(Mat& image){cv::Mat gray, hsv, ycrcb; // 定义三个 Mat 类对象//创建三个窗口,窗口名分别为"Gray"、"HSV"、"YCrCb",窗口属性为自由比例cv::namedWindow("Gray", cv::WINDOW_FREERATIO);cv::namedWindow("HSV", cv::WINDOW_FREERATIO);cv::namedWindow("YCrCb", cv::WINDOW_FREERATIO);//转换图像颜色空间cv::cvtColor(image, gray, cv::COLOR_BGR2GRAY);// 将图像转换为灰度图cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV);// 将图像转换为 HSV 图cv::cvtColor(image, ycrcb, cv::COLOR_BGR2YCrCb);// 将图像转换为 YCrCb 图// 显示转换后的图像imshow("Gray", gray);imshow("HSV", hsv);imshow("YCrCb", ycrcb);// 保存转换后的图像cv::imwrite("C:/Resources/image/gray.jpg", gray);cv::imwrite("C:/Resources/image/hsv.jpg", hsv);cv::imwrite("C:/Resources/image/ycrcb.jpg", ycrcb);}#include <iostream>#include <opencv2/opencv.hpp>#include "TestDemo.h"int main(int argc, char** argv) {cv::Mat img = cv::imread("C:/Resources/image/tifa_1.jpg");// 读取图像if (img.empty()){std::cout << "Could not open or find the image" << std::endl;return -1;}cv::namedWindow("Image", cv::WINDOW_FREERATIO);// 创建一个窗口,窗口名为"Image",窗口属性为自由比例cv::imshow("Image", img);// 显示图像,显示在"Image"窗口上TestDemo testDemo;// 创建一个 TestDemo 类对象testDemo.colorSpace_demo(img);// 调用 TestDemo 类的 colorSpace_demo 函数cv::waitKey(0);// 等待按键,0表示无限等待。参数为等待时间,单位为mscv::destroyAllWindows();// 销毁所有窗口return 0;}
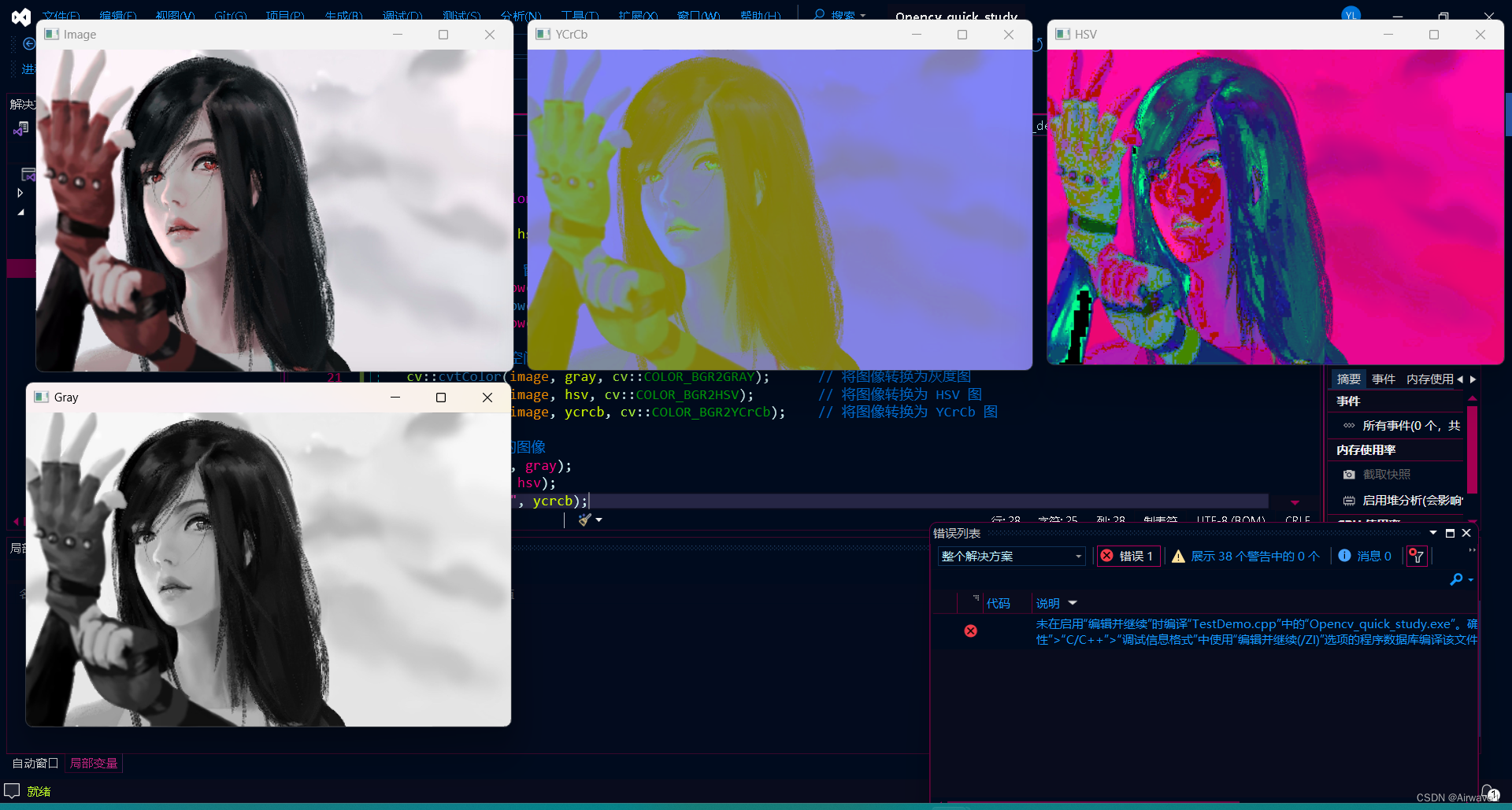
gray是灰度图,hsv是HSV图,YCrCb是YUV的变种
g 0-255, b 0-255, r 0-255, 分别表示灰度、蓝色、绿色、红色
H 0-180 S 0-255 V 0-255, 分别表示色调、饱和度、亮度
Y 0-255 Cr 0-255 Cb 0-255, 分别表示亮度、红色色度、蓝色色度
YCrCb是YUV的变种,YUV是彩色视频信号的编码方式,Y表示亮度,U和V表示色度
3.2保存图像
// 保存转换后的图像cv::imwrite("C:/Resources/image/gray.jpg", gray);cv::imwrite("C:/Resources/image/hsv.jpg", hsv);cv::imwrite("C:/Resources/image/ycrcb.jpg", ycrcb);//imwrite参数为保存路径,保存图像 
3.3提取指定色彩范围区域inrange
void TestDemo::inrange_colorSpace_demo(Mat& image){cv::Mat hsv;cv::cvtColor(image, hsv, cv::COLOR_BGR2HSV);// 将图像转换为 HSV 图namedWindow("hsv", WINDOW_FREERATIO);imshow("hsv", hsv);cv::Mat mask;//提取偏红色区域inRange(hsv, cv::Scalar(0, 43, 46), cv::Scalar(10, 255, 255), mask);// 提取指定色彩范围的区域,参数为输入图像、颜色下限、颜色上限、输出图像cv::namedWindow("mask", cv::WINDOW_FREERATIO);cv::imshow("mask", mask);}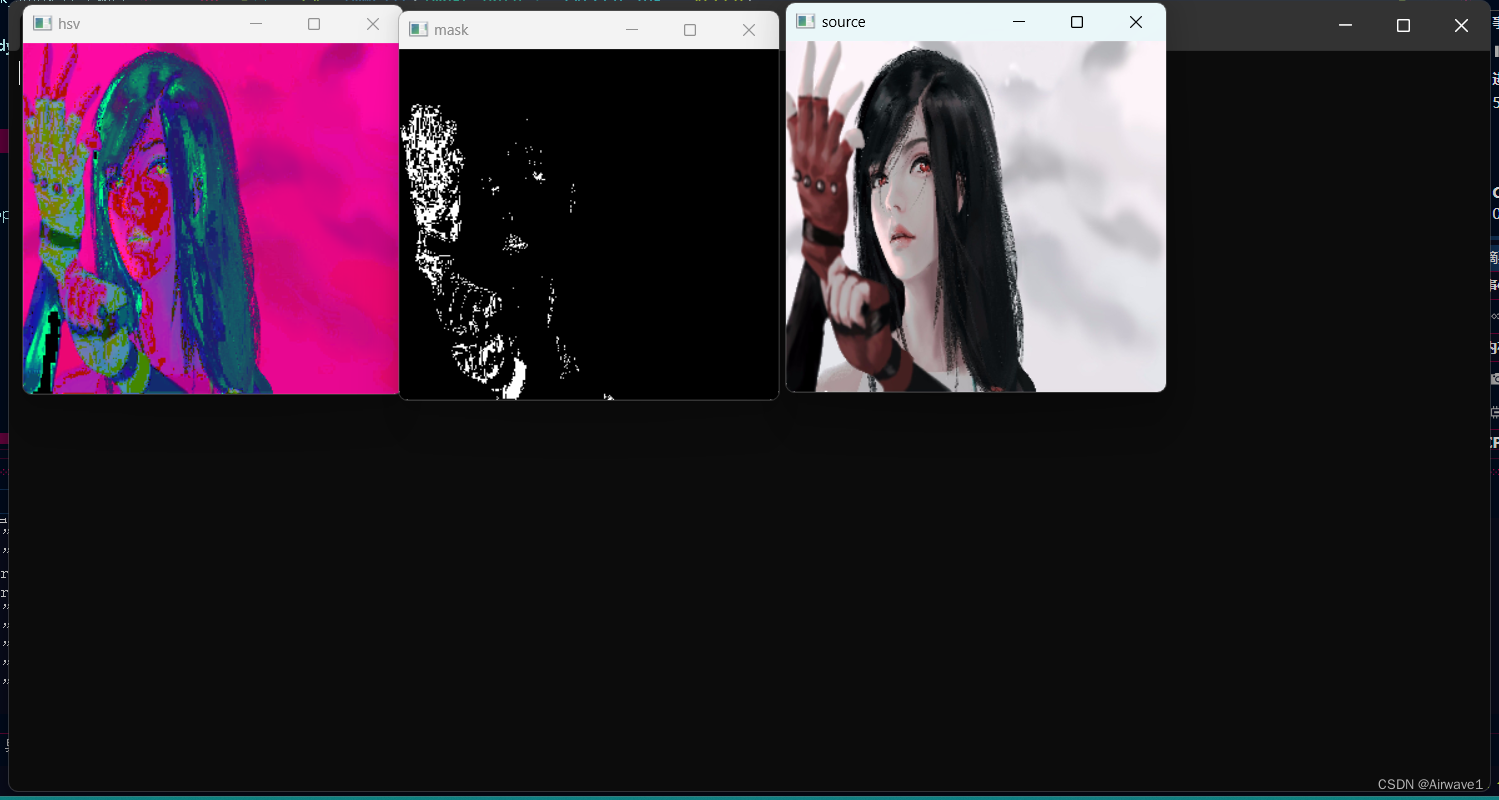
4.图像对象Mat
在 OpenCV 中,cv::Mat 是一个核心数据结构,用于表示图像和矩阵。Mat 是 "Matrix" 的缩写。它是一个多维矩阵类,用于存储图像像素值或任何其他多维数值数据。
4.1图像和矩阵的存储:
cv::Mat 可以用于存储图像的像素值,也可以用于存储任何数值数据的多维矩阵。图像的每个像素通常由一个或多个数值表示,例如灰度图像中的一个数值表示灰度级别,而彩色图像中的一个像素可能由三个数值表示(红、绿、蓝通道)。
4.2多通道和深度:
cv::Mat 可以是单通道或多通道的,也可以具有不同的数据深度。通道数表示数据的维度,而深度表示每个通道中数值的类型(例如,8位无符号整数、32位浮点数等)。
4.3构造和初始化:
cv::Mat 可以通过不同的构造函数进行初始化,可以通过加载图像文件、从其他数据结构复制数据、手动分配内存等方式创建。
4.4数据访问:
通过 cv::Mat 提供的方法访问和修改数据,例如使用 (i, j) 访问像素值,使用 at 方法,或者直接访问 data 指针。
void TestDemo::mat_demo(){Mat m1 = Mat::zeros(3, 3, CV_8UC3);// 创建一个 3x3 的 3 通道图像,像素值为 0//输出行数、列数、通道数std::cout << "m1:\n" << m1 << std::endl;std::cout << "m1.rows: " << m1.rows << std::endl;std::cout << "m1.cols: " << m1.cols << std::endl;std::cout << "m1.channels: " << m1.channels() << std::endl;}
用Mat创建一个底色为白色图像,通道为RGB
//通过scalar创建一个 255x255 的 3 通道图像,像素值为 255Mat m3 = Mat(255, 255, CV_8UC3, Scalar(255, 255, 255));std::cout << "m3:\n" << m3 << std::endl;imshow("m3", m3);cv::waitKey(0);cv::destroyAllWindows();
5.图像像素的读写操作
void TestDemo::pixel_read_write(Mat& image){int width = image.cols;// 获取图像宽度int height = image.rows;// 获取图像高度int channels = image.channels();// 获取图像通道数//for (int row = 0; row < height; row++)//{//for (int col = 0; col < width; col++)//{//if (channels == 1)//单通道,图像为灰度//{//int pv = image.at<uchar>(row, col);// 获取像素值,at<uchar>表示获取灰度图像的像素值,取值范围为0-255//image.at<uchar>(row, col) = 255 - pv;// 修改像素值,取反//}//if (channels == 3) //三通道图像,彩色图像//{//Vec3b pv_bgr = image.at<Vec3b>(row, col);// 获取像素值,at<Vec3b>表示获取彩色图像的像素值,bgr通道//image.at<Vec3b>(row, col)[0] = 255 - pv_bgr[0];// 修改像素值,取反,Vec3b[0]表示B通道//image.at<Vec3b>(row, col)[1] = 255 - pv_bgr[1];// 修改像素值,取反,G通道//image.at<Vec3b>(row, col)[2] = 255 - pv_bgr[2];// 修改像素值,取反,R通道//}//}//}//通过指针访问像素//指针访问像素for (int row = 0; row < height; row++){uchar* data = image.ptr<uchar>(row);// 获取图像第 row 行的指针for (int col = 0; col < width; col++){if (channels == 1)//单通道,图像为灰度{*data++ = 255 - *data;// 修改像素值,取反}if (channels == 3) //三通道图像,彩色图像{*data++ = 255 - *data;// 修改像素值,取反,B通道*data++ = 255 - *data;// 修改像素值,取反,G通道*data++ = 255 - *data;// 修改像素值,取反,R通道}}}namedWindow("pixel_read_write", WINDOW_FREERATIO);imshow("pixel_read_write", image);}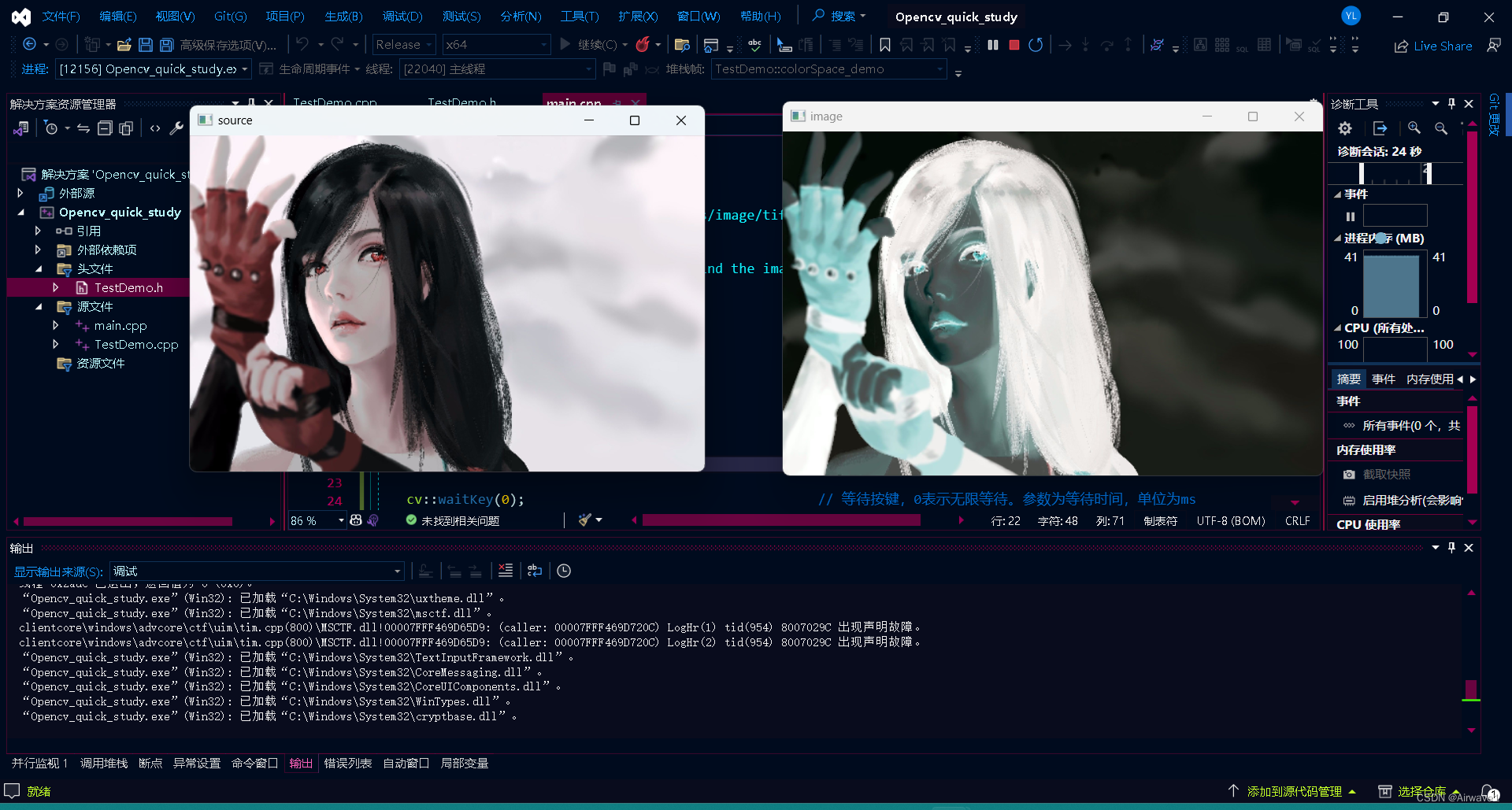
6.图像的算术操作
图像加减法操作
void TestDemo::arithmetic_demo(Mat& image){Mat m1;Mat m2;m1 = image - Scalar(100, 100, 100);// 图像减法m2 = image + Scalar(100, 100, 100);// 图像加法namedWindow("arithmetic_demo_m1", WINDOW_FREERATIO);imshow("arithmetic_demo_m1", m1);namedWindow("arithmetic_demo_m2", WINDOW_FREERATIO);imshow("arithmetic_demo_m2", m2);}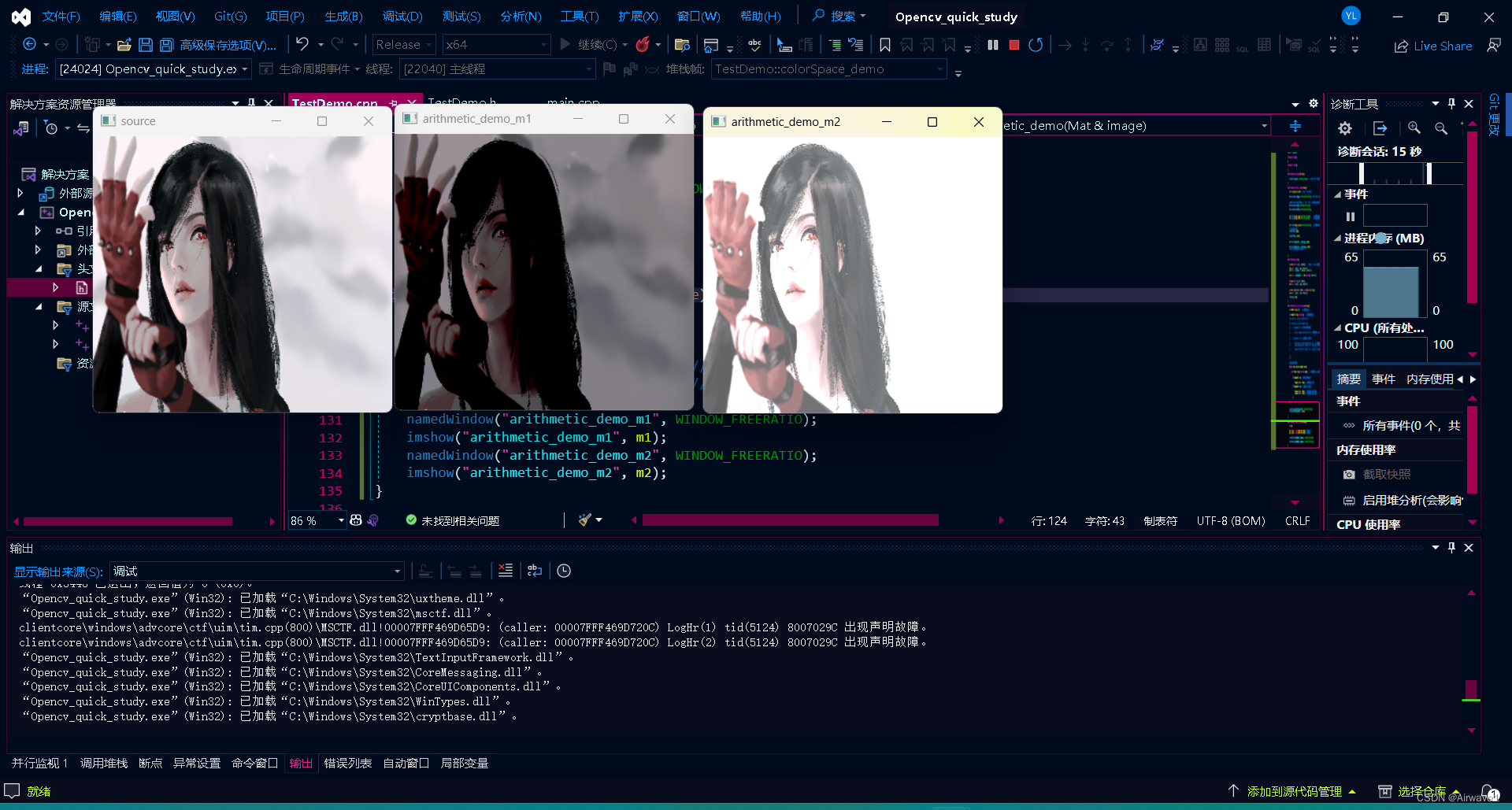
当进行像素值操作后,有些值超过了255(对于8位图像,像素值的范围是0到255)时,可以选择进行饱和操作(saturate),将超过范围的值强制截断到合法范围内。OpenCV 中的 cv::saturate_cast 函数可以完成这个任务
// 进行一些操作,可能导致像素值超过255 img = img * 2; // 将图像像素值饱和到0到255的范围 cv::Mat saturated_img; cv::saturate_cast<uchar>(img, saturated_img); // 显示原图和处理后的图像 cv::imshow("Original Image", img); cv::imshow("Saturated Image", saturated_img); cv::waitKey(0);
7.TrackBar滚动条操作
void TestDemo::create_trackbar_demo(cv::Mat& image){cv::namedWindow("create_trackbar_demo 亮度调整", cv::WINDOW_FREERATIO);int max_val = 100;int lightness = 40;cv::createTrackbar("light adjustment", "create_trackbar_demo 亮度调整", &lightness, max_val, on_trackBar_change, (void*)(&image));on_trackBar_change(lightness, (void*)(&image));}void TestDemo::on_trackBar_change(int pos, void* userdata){Mat image = *(Mat*)userdata;Mat dst = Mat::zeros(image.size(), image.type());image.convertTo(dst, -1, 1, pos - 50);imshow("create_trackbar_demo 亮度调整", dst);}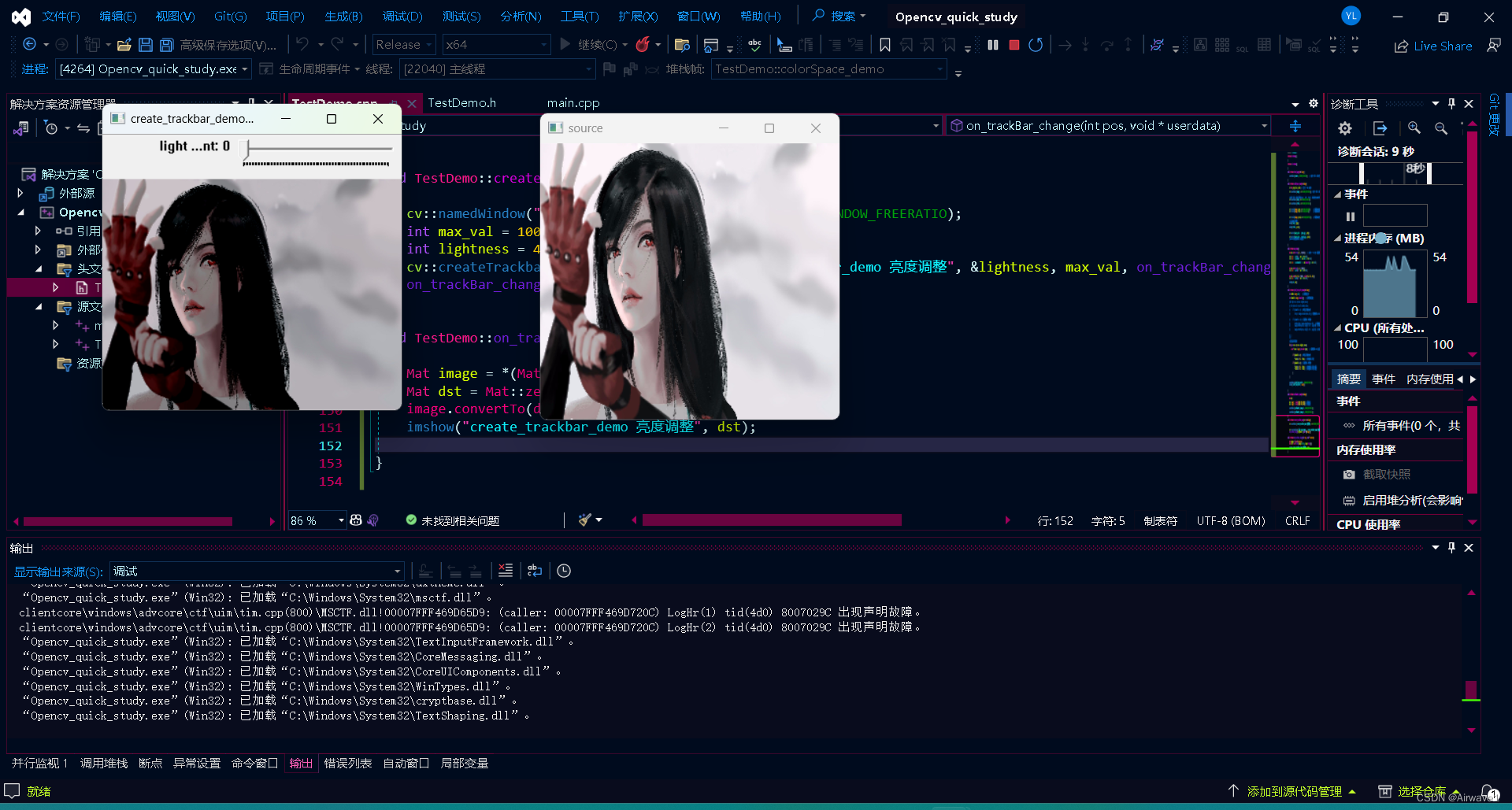
8.键盘响应
void TestDemo::keyboard_demo(Mat& image){namedWindow("keyboard_demo 键盘响应", WINDOW_FREERATIO);imshow("keyboard_demo 键盘响应", image);while (1){int key = waitKey(0);// 等待按键,0表示无限等待。参数为等待时间,单位为msif (key == 27)// 按下 ESC 键{break;}if (key == 's')// 按下 s 键{imwrite(image_path + "/keyboard_demo.jpg", image);// 保存图像std::cout << "image saved" << std::endl;}if (key == '0')//恢复原始图像{imshow("keyboard_demo 键盘响应", image);}if (key == '1') //将当前图像转换为灰度图{Mat gray;cvtColor(image, gray, COLOR_BGR2GRAY);imshow("keyboard_demo 键盘响应", gray);}if (key == '2') //将当前图像转换为HSV图{Mat hsv;cvtColor(image, hsv, COLOR_BGR2HSV);imshow("keyboard_demo 键盘响应", hsv);}}}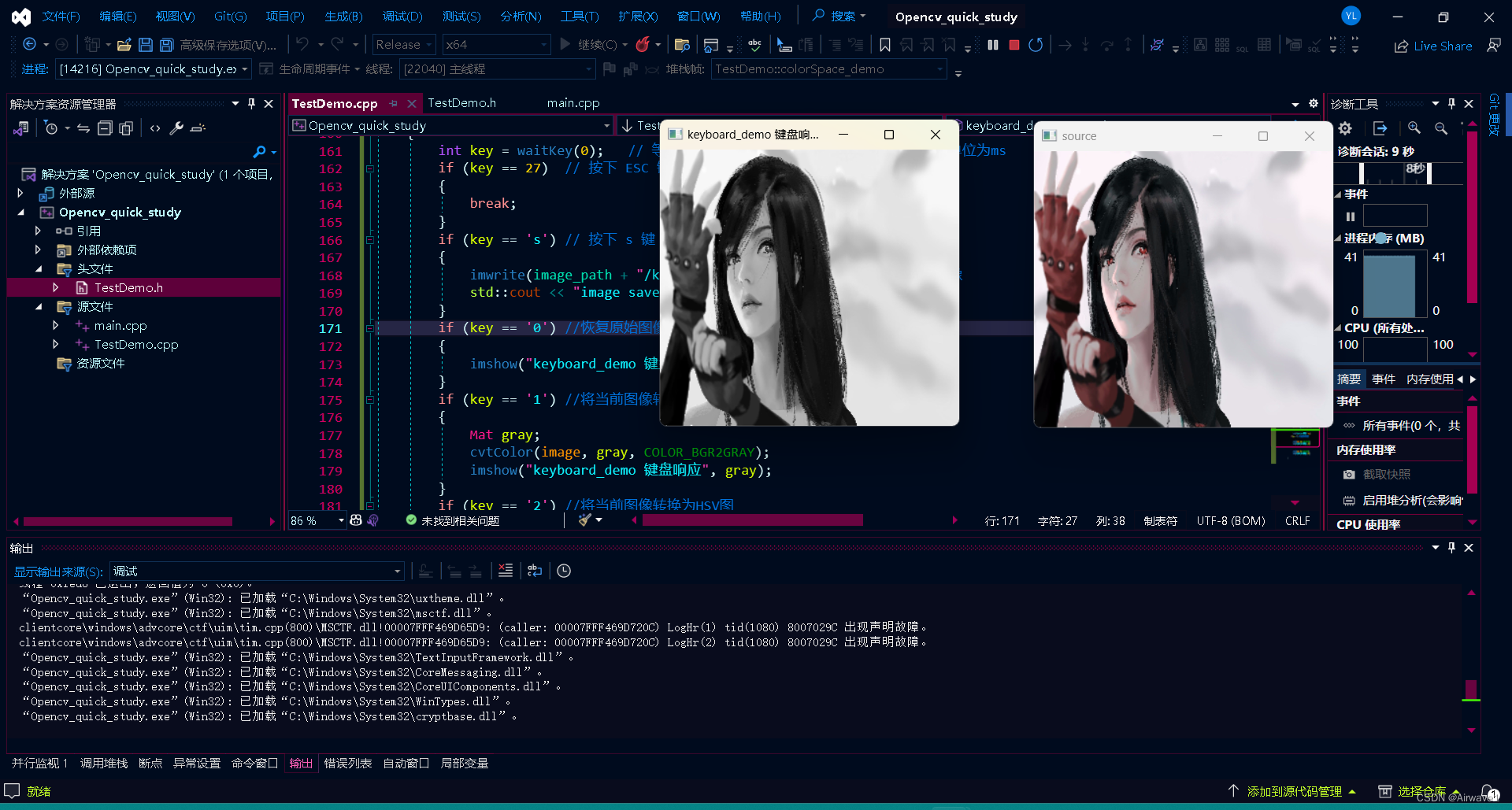

9.颜色表操作
void TestDemo::colorMap_demo(Mat& image){Mat gray;int colorMap[] = {COLORMAP_AUTUMN, COLORMAP_BONE,COLORMAP_JET, COLORMAP_WINTER,COLORMAP_RAINBOW, COLORMAP_OCEAN,COLORMAP_SUMMER, COLORMAP_SPRING,COLORMAP_COOL, COLORMAP_HSV,COLORMAP_PINK, COLORMAP_HOT};Mat dst;int index = 0;while (true){int c = waitKey(2000);if ((char)c == '0'){break;}applyColorMap(image, dst, colorMap[index % 19]);index++;namedWindow("colorMap_demo", WINDOW_FREERATIO);imshow("colorMap_demo", dst);}}

10.图像像素逻辑操作
画两个矩形进行位操作
void TestDemo::bitwise_demo(Mat& image1, Mat& image2){Mat m1 = Mat::zeros(Size(256, 256), CV_8UC3);Mat m2 = Mat::zeros(Size(256, 256), CV_8UC3);//创建矩形//线宽-1表示填充,线宽>0表示边框宽度rectangle(m1, Rect(100, 100, 80, 80), Scalar(255, 255, 0), -1, LINE_8, 0);// 矩形填充,颜色为黄色,线宽为-1,表示填充,线型为8连通,矩形左上角坐标为(100,100),宽高为80rectangle(m2, Rect(150, 150, 80, 80), Scalar(0, 255, 255), -1, LINE_8, 0);// 矩形填充,颜色为青色,线宽为-1,表示填充,线型为8连通,矩形左上角坐标为(150,150),宽高为80imshow("m1", m1);imshow("m2", m2);Mat dst_and, dst_or, dst_not, dst_xor;bitwise_and(m1, m2, dst_and);// 与操作bitwise_or(m1, m2, dst_or);// 或操作bitwise_not(m1, dst_not);// 非操作bitwise_xor(m1, m2, dst_xor);// 异或操作imshow("dst_and", dst_and);imshow("dst_or", dst_or);imshow("dst_not", dst_not);imshow("dst_xor", dst_xor);}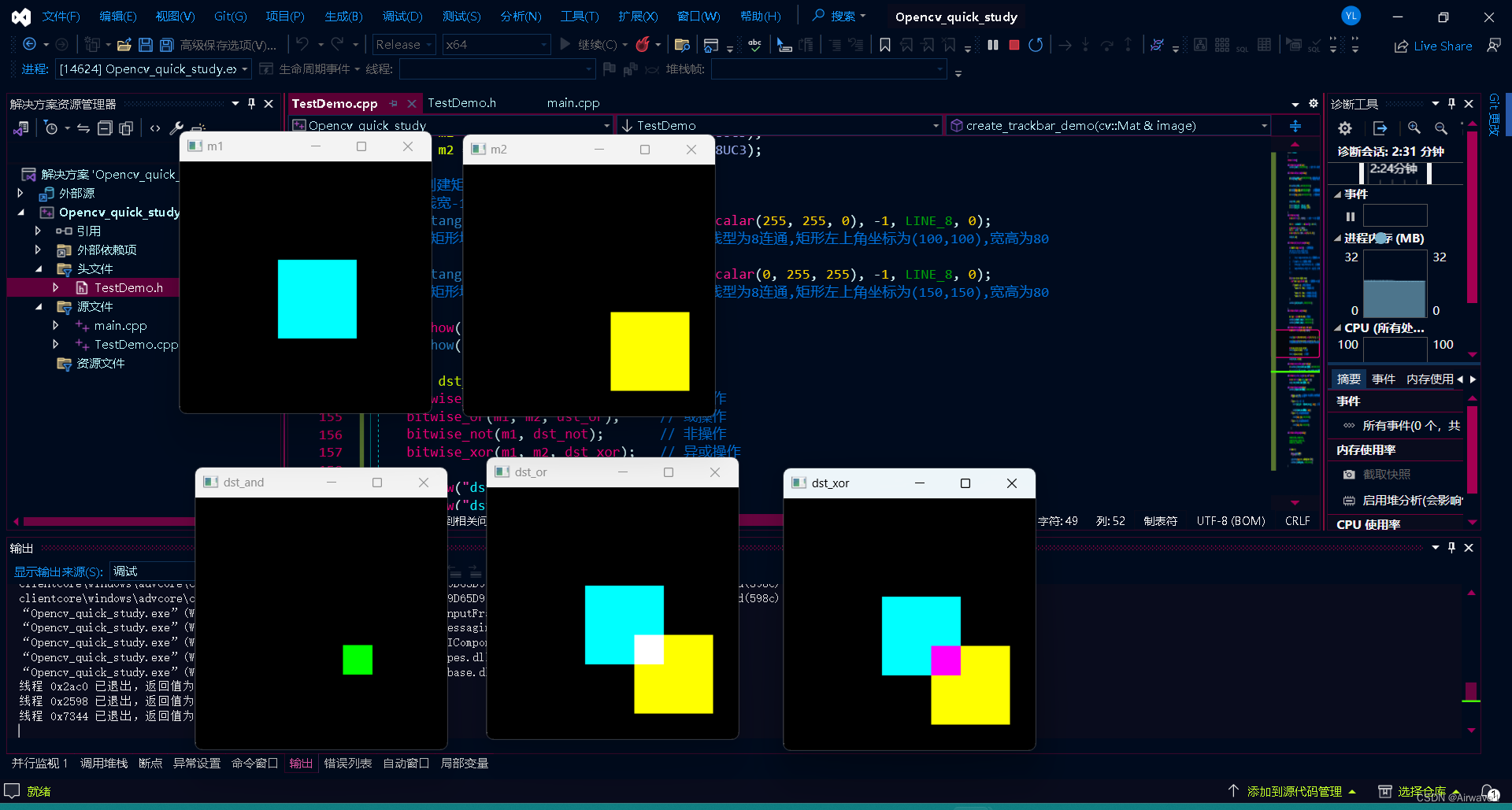
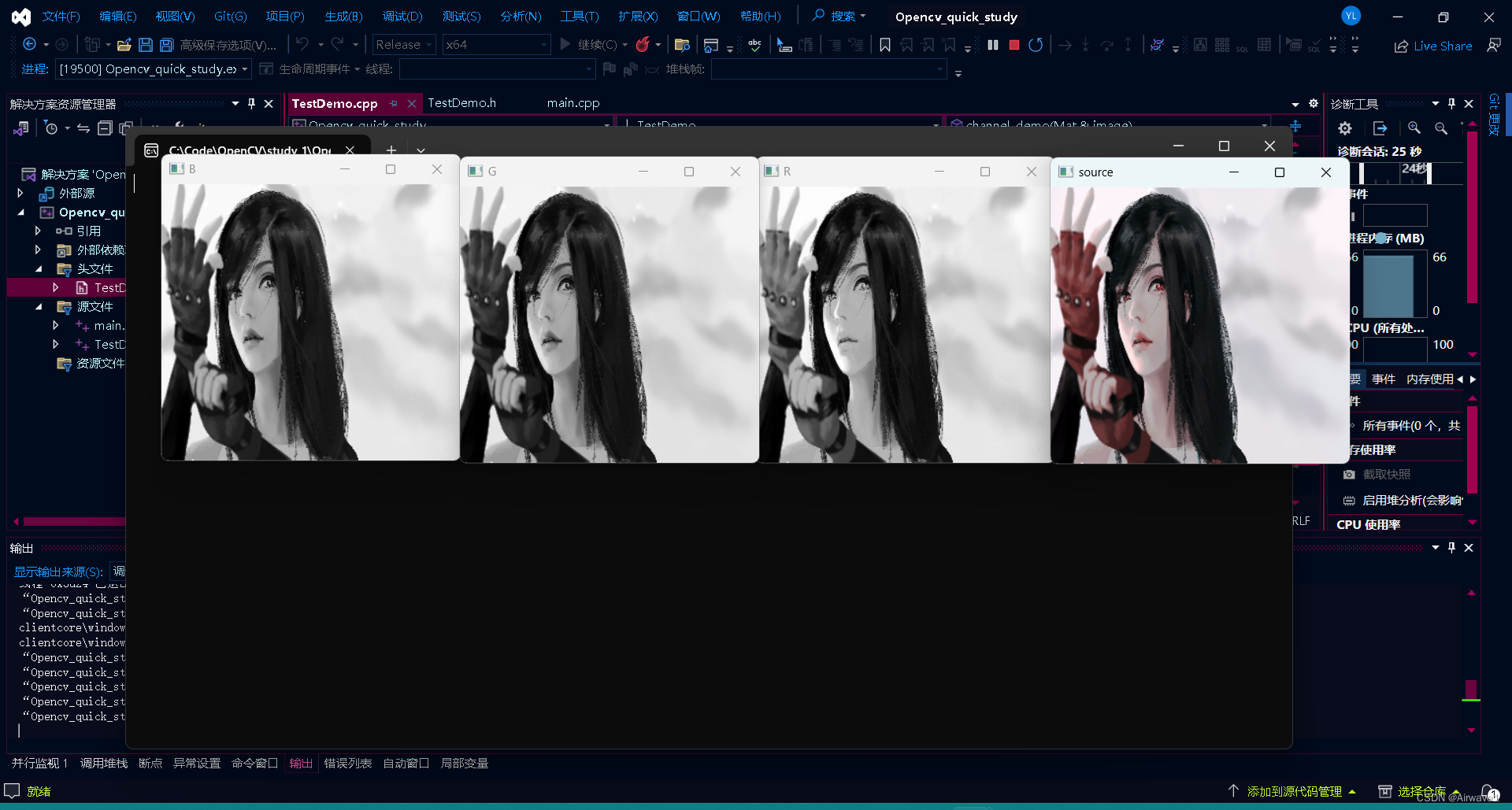
11.通道分离与合
void TestDemo::channel_demo(Mat& image){Mat bgr[3];split(image, bgr);// 通道分离namedWindow("B", WINDOW_FREERATIO);namedWindow("G", WINDOW_FREERATIO);namedWindow("R", WINDOW_FREERATIO);imshow("B", bgr[0]);imshow("G", bgr[1]);imshow("R", bgr[2]);Mat dst;bgr[1] = 0;// 将 G 通道置为 0bgr[2] = 0;// 将 R 通道置为 0merge(bgr, 3, dst);// 通道合并namedWindow("channel_demo", WINDOW_FREERATIO);imshow("channel_demo", dst);}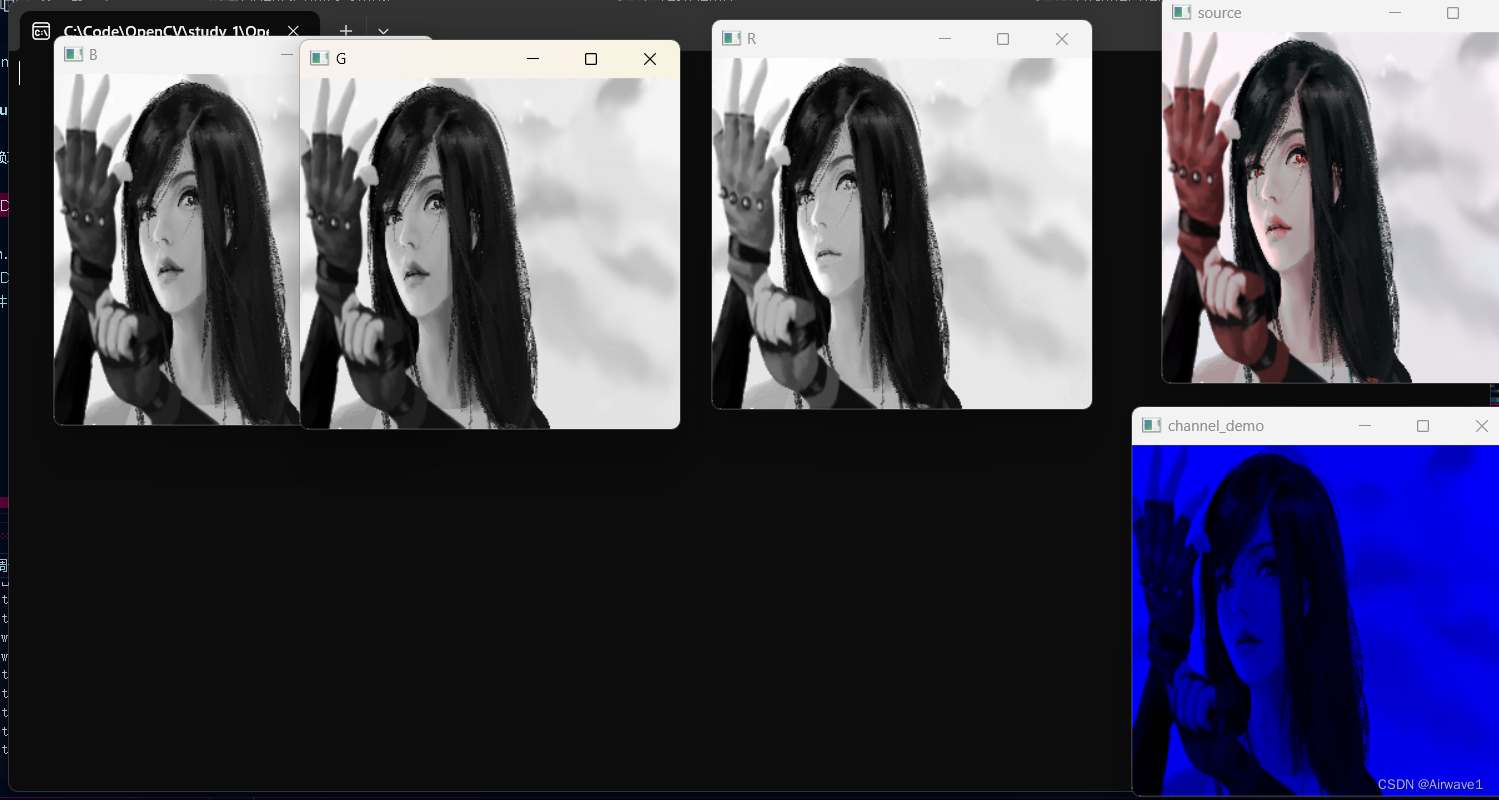
混合图像
//混合图像Mat src1 = image;Mat src2 = dst;Mat dst2;addWeighted(src1, 0.5, src2, 0.5, 0, dst2);// 图像混合namedWindow("channel_demo2", WINDOW_FREERATIO);imshow("channel_demo2", dst2);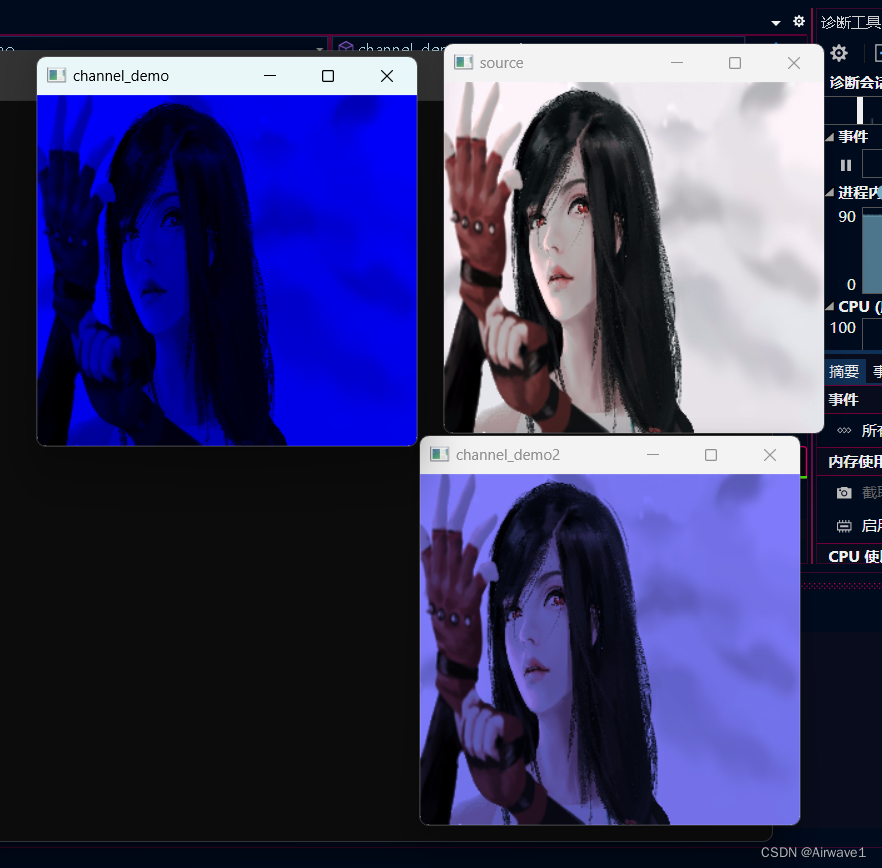
12.像素值统计
void TestDemo::pixel_statistics(Mat& image){double minVal, maxVal;Point minLoc, maxLoc;std::vector<Mat> mv;split(image, mv);// 通道分离for (int i = 0; i < mv.size(); i++){minMaxLoc(mv[i], &minVal, &maxVal, &minLoc, &maxLoc);// 获取最大最小值std::cout << "channel " << i << " minVal: " << minVal << " maxVal: " << maxVal << std::endl;}Mat mean, stddev;meanStdDev(image, mean, stddev);// 获取均值和标准差std::cout << "mean: " << mean << std::endl << "stddev: " << stddev << std::endl;}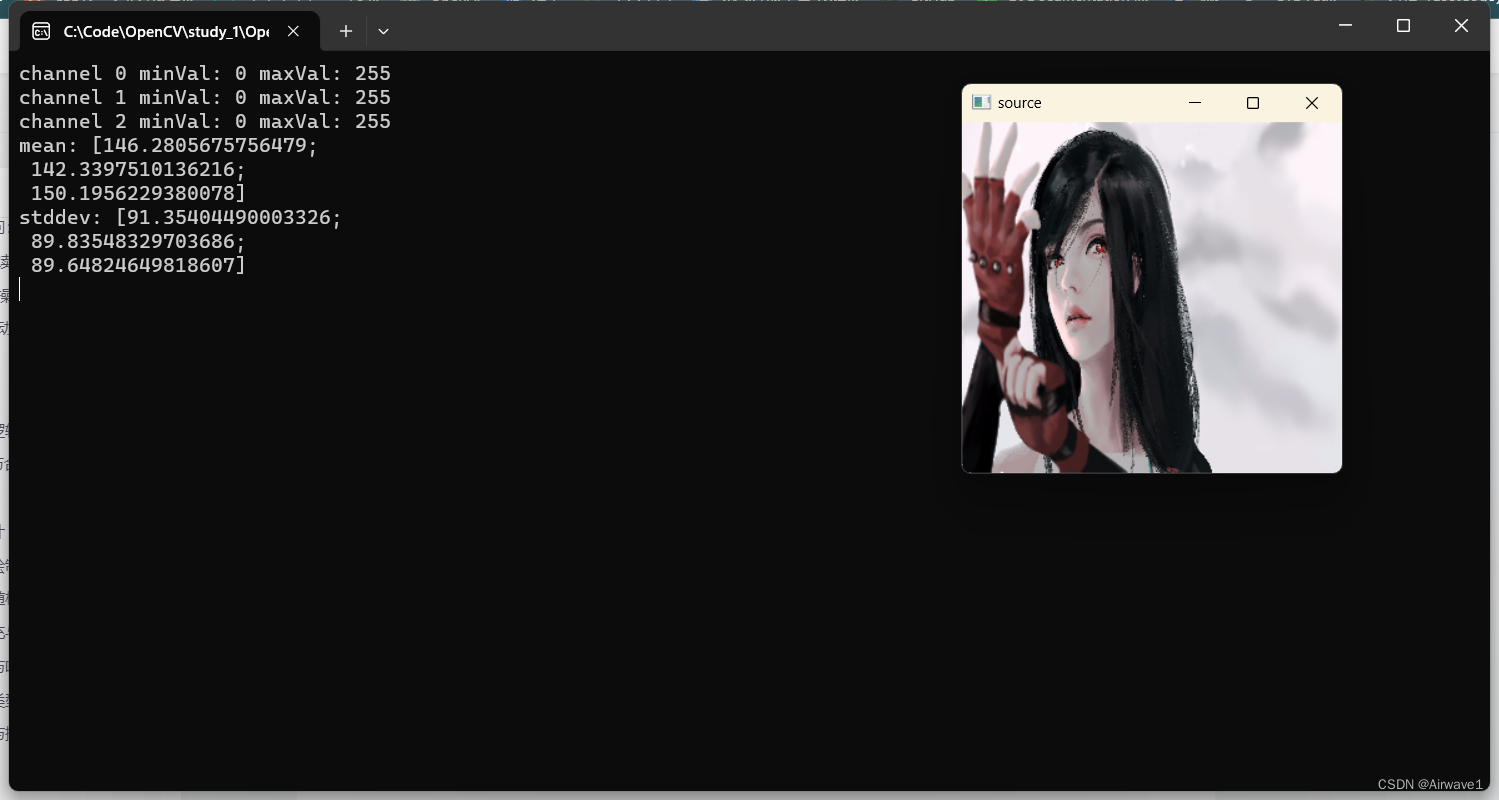
13.几何形状绘制
void TestDemo::draw_demo(){//创建一个白色底板的图像Mat image = Mat::zeros(Size(512, 512), CV_8UC3);image = Scalar(255, 255, 255);//绘制直线line(image, Point(100, 100), Point(200, 200), Scalar(0, 0, 255), 2, LINE_8, 0);// 直线绘制,颜色为红色,线宽为2,线型为8连通,起点坐标为(100,100),终点坐标为(200,200)//绘制矩形rectangle(image, Rect(200, 200, 100, 100), Scalar(0, 255, 0), 2, LINE_8, 0);// 矩形绘制,颜色为绿色,线宽为2,线型为8连通,矩形左上角坐标为(200,200),宽高为100//绘制圆形circle(image, Point(300, 300), 50, Scalar(255, 0, 0), 2, LINE_8, 0);// 圆形绘制,颜色为蓝色,线宽为2,线型为8连通,圆心坐标为(300,300),半径为50//绘制椭圆ellipse(image, Point(400, 400), Size(100, 50), 0, 0, 360, Scalar(255, 255, 0), 2, LINE_8, 0);// 椭圆绘制,颜色为黄色,线宽为2,线型为8连通,椭圆中心坐标为(400,400),长轴宽度为100,短轴宽度为50//绘制多边形std::vector<Point> points;points.push_back(Point(100, 400));points.push_back(Point(200, 300));points.push_back(Point(300, 400));points.push_back(Point(400, 300));points.push_back(Point(500, 400));const Point* ppt[1] = { points.data() };int npt[] = { points.size() };fillPoly(image, ppt, npt, 1, Scalar(0, 255, 255), LINE_8, 0);//显示图像namedWindow("draw_demo", WINDOW_FREERATIO);imshow("draw_demo", image);}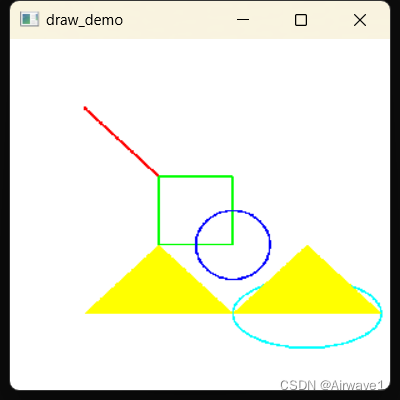
在图像上绘制
void TestDemo::draw_demo(Mat& image){//在图像的人脸上绘制矩形Mat img = image.clone();rectangle(img, Rect(380, 400, 700, 700), Scalar(0, 255, 0), 3, 0, 0);//显示图像namedWindow("draw_demo", WINDOW_FREERATIO);imshow("draw_demo", img);//保存图像imwrite(image_path + "/draw_demo.jpg", img);}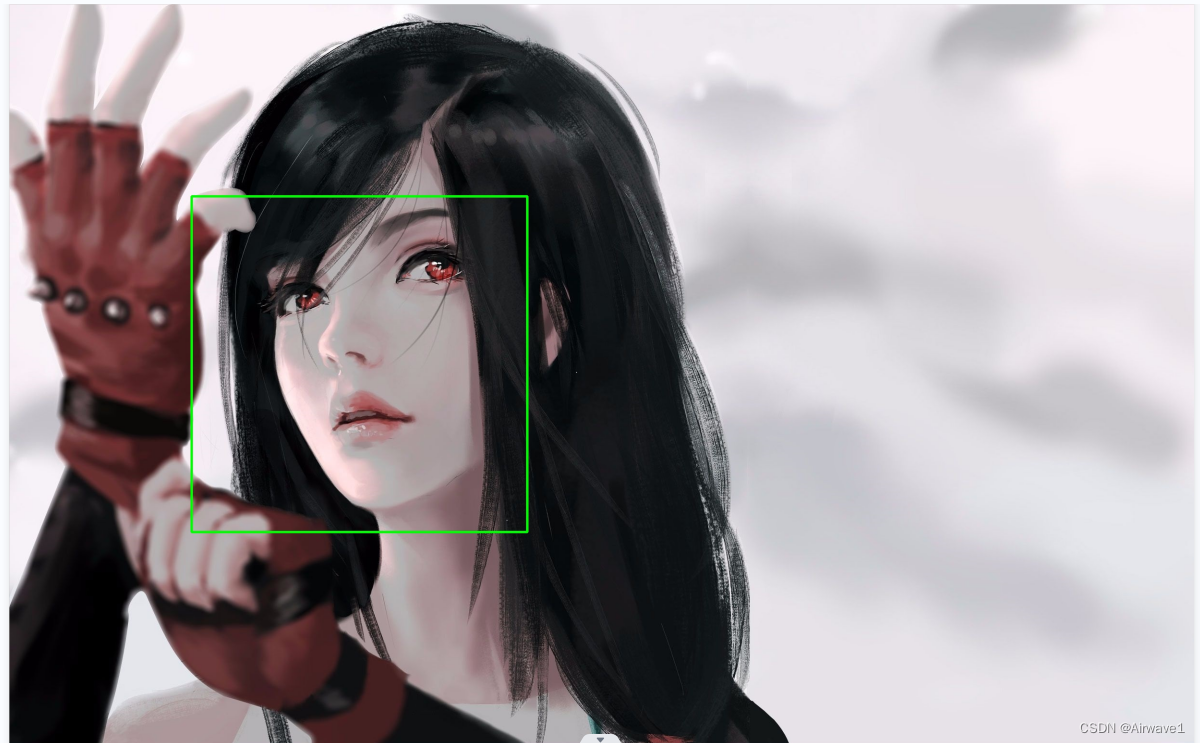
14.随机数与随机颜色
void TestDemo::draw_demo_random_color(Mat& image){//创建一个白色底板的图像Mat img = Mat::zeros(Size(512, 512), CV_8UC3);img = Scalar(255, 255, 255);//绘制随机颜色的直线RNG rng(12345);for (int i = 0; i < 100; i++){Point pt1, pt2;pt1.x = rng.uniform(0, 512);pt1.y = rng.uniform(0, 512);pt2.x = rng.uniform(0, 512);pt2.y = rng.uniform(0, 512);line(img, pt1, pt2, Scalar(rng.uniform(0, 255), rng.uniform(0, 255), rng.uniform(0, 255)), 2, LINE_8, 0);}//显示图像namedWindow("draw_demo_random_color", WINDOW_FREERATIO);imshow("draw_demo_random_color", img);//保存图像imwrite(image_path + "/draw_demo_random_color.jpg", img);}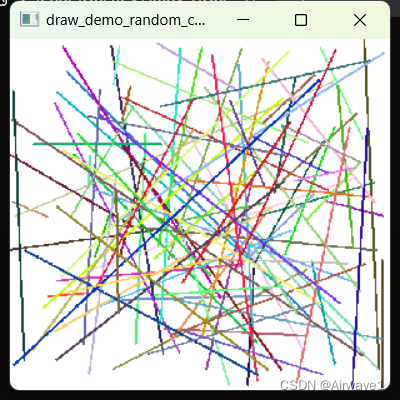
15.多边形填充与绘制
void TestDemo::draw_polyline(){//创建一个白色底板的图像Mat img = Mat::zeros(Size(512, 512), CV_8UC3);img = Scalar(255, 255, 255);//绘制多边形std::vector<Point> points;points.push_back(Point(100, 400));points.push_back(Point(200, 300));points.push_back(Point(300, 400));points.push_back(Point(400, 300));points.push_back(Point(500, 400));const Point* ppt[1] = { points.data() };int npt[] = { points.size() };polylines(img, ppt, npt, 1, true, Scalar(0, 255, 255), 2, LINE_8, 0);//显示图像namedWindow("draw_polyline", WINDOW_FREERATIO);imshow("draw_polyline", img);}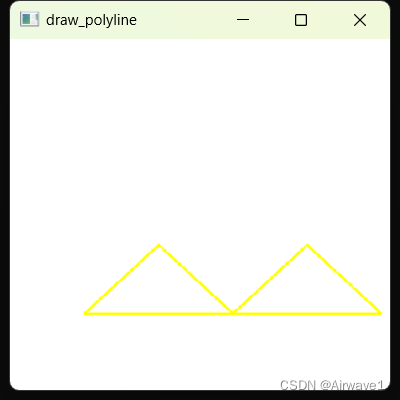
16.鼠标操作与响应
void TestDemo::mouse_demo(Mat& image){//检测鼠标所在的位置,在图像右下角显示鼠标所在的位置,以及像素值namedWindow("mouse_demo", WINDOW_FREERATIO);imshow("mouse_demo", image);setMouseCallback("mouse_demo", on_mouse, (void*)(&image));}void TestDemo::on_mouse(int event, int x, int y, int flags, void* data){Mat image = *(Mat*)data;std::cout << "x: " << x << " y: " << y << std::endl;if (event == EVENT_LBUTTONDOWN){std::cout << "Left button of the mouse is clicked - position (" << x << ", " << y << ")" << std::endl;}if (event == EVENT_RBUTTONDOWN){std::cout << "Right button of the mouse is clicked - position (" << x << ", " << y << ")" << std::endl;}}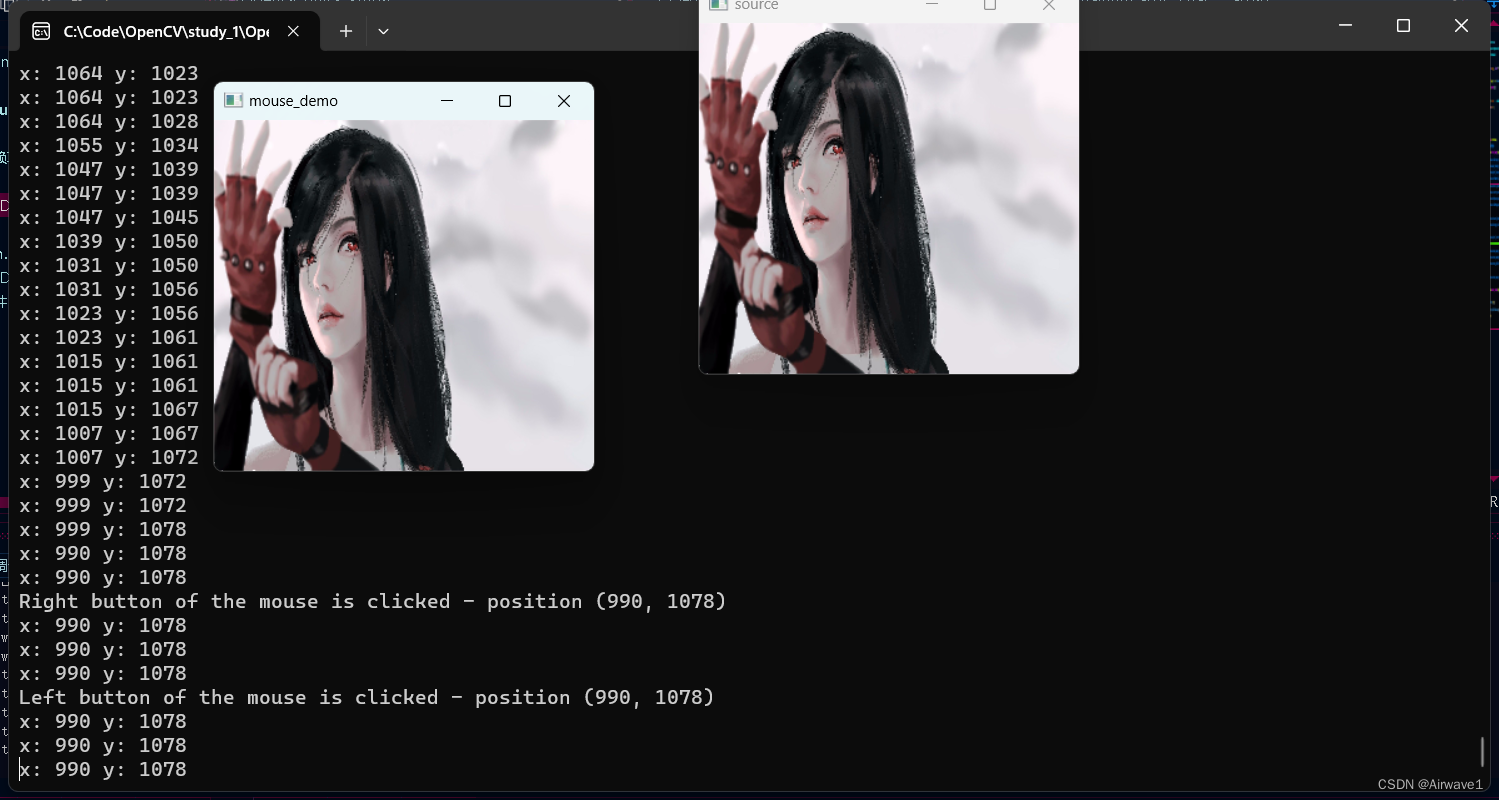
17.图像像素类型转化与归一化
void TestDemo::pixel_type_conversion(Mat& image){namedWindow("pixel_type_conversion", WINDOW_FREERATIO);namedWindow("pixel_type_conversion_normalize", WINDOW_FREERATIO);//图像像素类型转化与归一化Mat gray;cvtColor(image, gray, COLOR_BGR2GRAY);// 将图像转换为灰度图imshow("pixel_type_conversion", gray);//像素归一化Mat dst;normalize(gray, dst, 0, 255, NORM_MINMAX, CV_8UC1);imshow("pixel_type_conversion_normalize", dst);}18.图像缩放与插值
void TestDemo::resize_demo(Mat& image, int x, int y){Mat dst;// 图像缩放,参数为输入图像、输出图像、目标图像大小、x方向缩放因子、y方向缩放因子、插值方式resize(image, dst, Size(x, y), 0, 0, INTER_LINEAR);//namedWindow("resize_demo", WINDOW_FREERATIO);imshow("resize_demo", dst);}
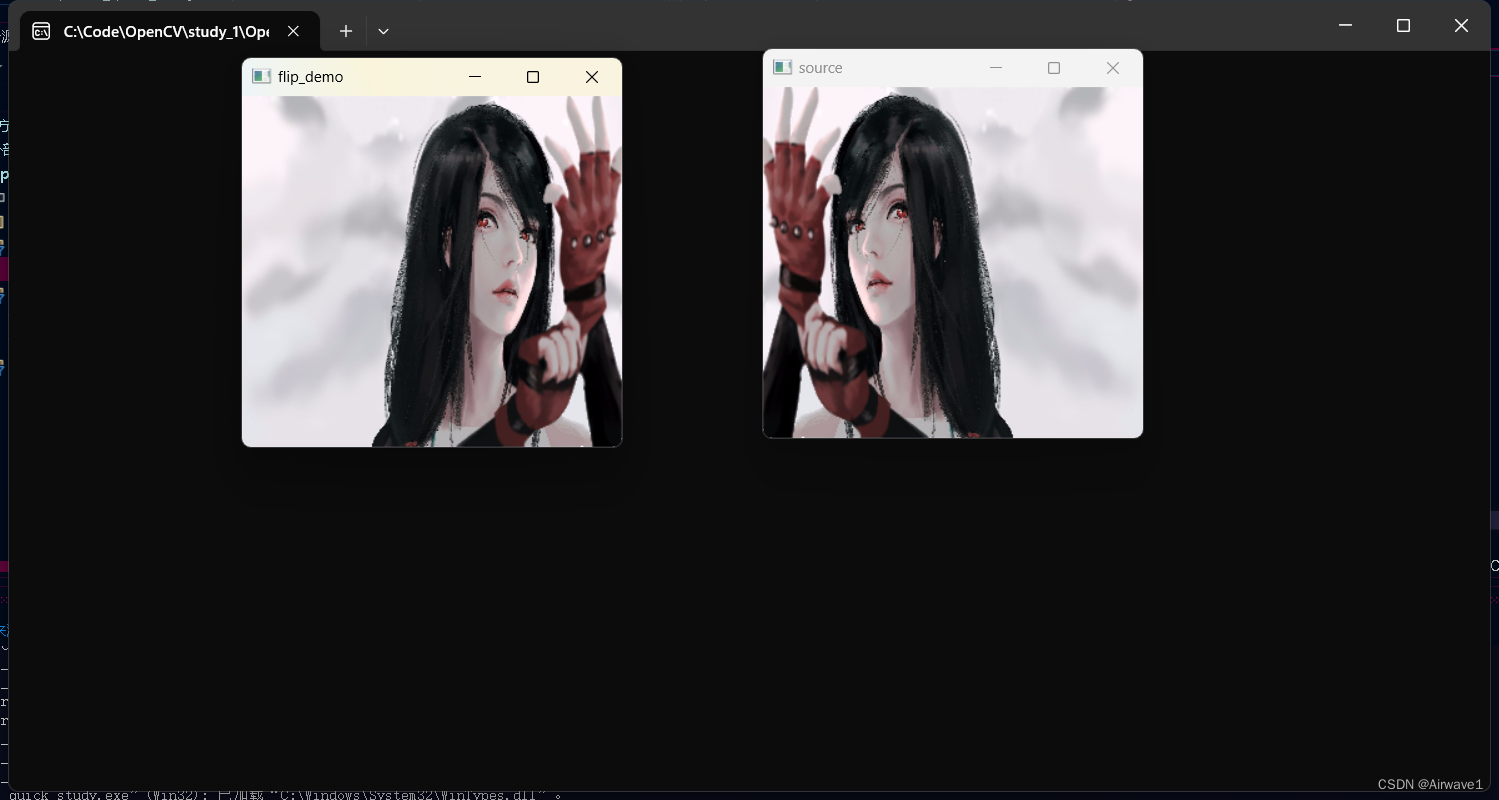
19.图像翻转
void TestDemo::flip_demo(Mat& image, int flipCode){Mat dst;// 图像翻转,参数为输入图像、输出图像、翻转方式//flipCode=0表示绕x轴翻转,flipCode>0表示绕y轴翻转,flipCode<0表示绕x轴和y轴同时翻转flip(image, dst, flipCode);namedWindow("flip_demo", WINDOW_FREERATIO);imshow("flip_demo", dst);}绕x轴翻转

绕y翻转
同时绕x,y翻转

20.图像旋转
void TestDemo::rotate_demo(Mat& image, double angle, double scale){/*参数angle表示旋转角度,正值表示逆时针旋转,负值表示顺时针旋转参数scale表示缩放因子,大于1表示放大,小于1表示缩小*/Mat dst, M;int w = image.cols;int h = image.rows;M = getRotationMatrix2D(Point(w / 2, h / 2), angle, scale);// 获取旋转矩阵double cos = abs(M.at<double>(0, 0));double sin = abs(M.at<double>(0, 1));int nw = cos * w + sin * h;int nh = sin * w + cos * h;M.at<double>(0, 2) += (nw - w) / 2;M.at<double>(1, 2) += (nh - h) / 2;warpAffine(image, dst, M, Size(nw, nh));// 图像旋转namedWindow("rotate_demo", WINDOW_FREERATIO);imshow("rotate_demo", dst);}
21.视频文件/摄像头使用
void TestDemo::video_demo(){VideoCapture capture(0);// 打开摄像头if (!capture.isOpened())// 摄像头打开失败{std::cout << "摄像头打开失败" << std::endl;return;}Mat frame;while (1){capture >> frame;// 读取摄像头图像//翻转摄像头显示flip_demo(frame, 1);imshow("video_demo", frame);// 显示摄像头图像if (waitKey(30) == 27)// 按下 ESC 键{break;}}capture.release();// 释放摄像头destroyAllWindows();// 销毁所有窗口}22.视频处理与保存
//保存视频VideoWriter writer;writer.open(image_path + "/video_demo.avi", VideoWriter::fourcc('M', 'J', 'P', 'G'), 25, Size(frame.cols, frame.rows));while (1){capture >> frame;// 读取摄像头图像writer.write(frame);// 写入视频imshow("video_demo", frame);// 显示摄像头图像if (waitKey(30) == 27)// 按下 ESC 键{break;}}writer.release();// 释放视频23.图像直方图
直方图(Histogram)是图像处理中常用的工具,它表示图像中每个像素强度值的分布情况。在OpenCV中,可以使用 cv::calcHist 函数来计算图像的直方图。
图像直方图是一种展示图像像素强度分布的统计图表。它显示了图像中每个像素强度值的频率,有助于分析图像的亮度、对比度和色调等特征。以下是图像直方图的一些主要作用:
亮度和对比度分析: 直方图可以用于分析图像的整体亮度和对比度。通过观察直方图的形状,可以了解图像中亮度的分布情况,从而调整图像的亮度和对比度,使其更符合需求。
图像增强: 直方图均衡化是一种常见的图像增强方法,通过调整图像的直方图,使其更均匀地分布在整个灰度范围内,从而增强图像的细节和对比度。
颜色分析: 对于彩色图像,可以对每个颜色通道分别绘制直方图,以了解图像中各个颜色通道的分布情况。这对于颜色校正和调整非常有帮助。
阈值选择: 直方图可以帮助选择图像的二值化阈值。通过观察直方图的波峰和波谷,可以找到合适的阈值,将图像转换为二值图像。
检测图像质量问题: 异常的直方图形状可能指示图像质量问题,例如曝光不足或曝光过度。通过检查直方图,可以识别并纠正这些问题。
void TestDemo::histogram_demo(Mat& image){//创建一个白色底板的图像Mat img = Mat::zeros(Size(512, 512), CV_8UC3);img = Scalar(255, 255, 255);//绘制直方图Mat gray;cvtColor(image, gray, COLOR_BGR2GRAY);// 将图像转换为灰度图int histSize = 256;// 直方图尺寸float range[] = { 0, 256 };// 像素值范围const float* histRange = { range };Mat hist;calcHist(&gray, 1, 0, Mat(), hist, 1, &histSize, &histRange, true, false);// 计算直方图int hist_w = 512;// 直方图宽度int hist_h = 400;// 直方图高度int bin_w = cvRound((double)hist_w / histSize);// 直方图每个条的宽度Mat histImage(hist_h, hist_w, CV_8UC3, Scalar(255, 255, 255));// 创建直方图图像normalize(hist, hist, 0, histImage.rows, NORM_MINMAX, -1, Mat());// 直方图归一化for (int i = 1; i < histSize; i++){line(histImage, Point(bin_w * (i - 1), hist_h - cvRound(hist.at<float>(i - 1))), Point(bin_w * (i), hist_h - cvRound(hist.at<float>(i))), Scalar(0, 0, 0), 2, 8, 0);// 绘制直方图}namedWindow("histogram_demo", WINDOW_FREERATIO);imshow("histogram_demo", histImage);}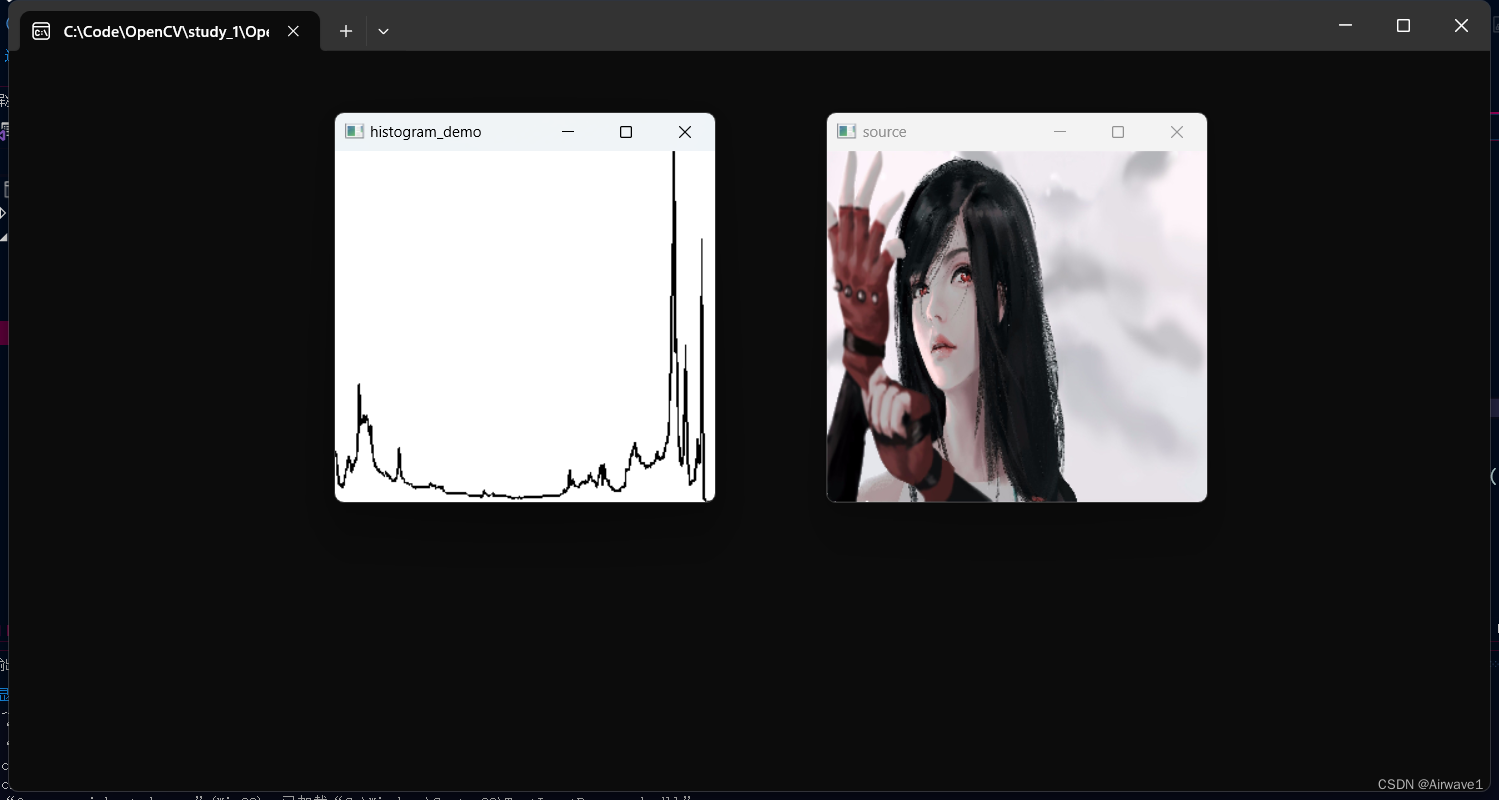
24.二维直方图
二维直方图是在图像处理中用于描述两个变量(通常是图像的两个通道)之间关系的直方图。在图像处理中,最常见的是彩色图像的二维直方图,其中横轴和纵轴分别表示两个颜色通道。
以下是二维直方图的一些主要特点和应用:
颜色分布: 对于彩色图像,二维直方图可以显示不同颜色通道之间的关系。例如,对于RGB图像,横轴和纵轴可以分别表示红色和绿色通道,通过颜色在直方图中的分布,可以了解图像中不同颜色的占比。
色调相关性: 二维直方图可以用于分析图像中颜色通道之间的相关性。通过观察直方图的形状,可以了解图像中颜色的相关性,从而更好地理解图像的色调。
色彩校正: 通过分析二维直方图,可以识别和调整图像中不同通道的色彩偏差。这对于颜色校正非常有帮助,确保图像的颜色表现准确。
图像分割: 二维直方图在图像分割中有广泛的应用。通过选择合适的阈值,可以将图像分割成不同的区域,从而实现物体的检测和识别。
通道选择: 通过分析二维直方图,可以确定哪些颜色通道对于特定任务最为重要。这对于图像特征提取和图像识别非常有帮助。
void TestDemo::histogram_2d_demo(Mat& image){//创建一个白色底板的图像Mat img = Mat::zeros(Size(512, 512), CV_8UC3);img = Scalar(255, 255, 255);//绘制二维直方图Mat hsv;cvtColor(image, hsv, COLOR_BGR2HSV);// 将图像转换为 HSV 图int hbins = 30, sbins = 32;// H、S 通道直方图尺寸int histSize[] = { hbins, sbins };float hranges[] = { 0, 180 };// H 通道像素值范围float sranges[] = { 0, 256 };// S 通道像素值范围const float* ranges[] = { hranges, sranges };MatND hist;int channels[] = { 0, 1 };calcHist(&hsv, 1, channels, Mat(), hist, 2, histSize, ranges, true, false);// 计算二维直方图double maxVal = 0;minMaxLoc(hist, 0, &maxVal, 0, 0);int scale = 10;Mat histImg = Mat::zeros(sbins * scale, hbins * 10, CV_8UC3);for (int h = 0; h < hbins; h++){for (int s = 0; s < sbins; s++){float binVal = hist.at<float>(h, s);int intensity = cvRound(binVal * 255 / maxVal);rectangle(histImg, Point(h * scale, s * scale), Point((h + 1) * scale - 1, (s + 1) * scale - 1), Scalar::all(intensity), FILLED);}}namedWindow("histogram_2d_demo", WINDOW_FREERATIO);imshow("histogram_2d_demo", histImg);}
25.直方图均衡化
图像直方图均衡化是一种用于增强图像对比度的方法,通过调整图像的灰度分布,使得各个灰度级均匀分布,从而提高图像的视觉效果。下面详细讲解一下图像直方图均衡化的原理和步骤:
原理:
灰度直方图: 图像的灰度直方图表示了图像中各个灰度级的分布情况,即每个灰度级的像素数量。
累积分布函数(CDF): CDF 是灰度直方图的累积形式,表示每个灰度级以下的像素累积数量。
均衡化变换: 均衡化变换的目标是将图像的灰度分布映射到均匀分布,即让 CDF 尽可能平滑。
步骤:
计算灰度直方图: 对图像进行灰度化,统计各个灰度级的像素数量。
计算累积分布函数(CDF): 利用灰度直方图计算各个灰度级的累积概率。
均衡化变换: 利用均衡化变换公式,对每个灰度级进行映射。
生成均衡化后的图像: 根据均衡化变换,生成均衡化后的图像。
26.图像卷积操作
图像卷积是图像处理中的一种基本操作,它通过在图像上滑动一个卷积核(也称为滤波器或窗口),对图像的每个像素进行加权和的操作。这一过程可以用来实现一系列的图像处理任务,如模糊、锐化、边缘检测等。下面是图像卷积的基本原理和步骤:
原理:
卷积核: 卷积核是一个小矩阵,包含了一组权重值。卷积操作时,卷积核在图像上滑动,与图像中的每个像素进行加权和的计算。
加权和计算: 对于图像中的每个像素,卷积核与图像的对应区域进行逐元素相乘,然后将所有乘积结果相加,得到最终的加权和。
滑动操作: 卷积核在图像上滑动,对每个像素都进行加权和的计算,得到新的图像。
步骤:
定义卷积核: 确定卷积核的大小和权重。
图像填充: 可选的步骤,对图像进行填充,以保留边缘信息。
卷积操作: 卷积核在图像上滑动,对每个像素进行加权和的计算。
输出结果: 得到卷积后的图像,即输出结果。
void TestDemo::convolution_demo(Mat& image){//创建一个白色底板的图像Mat img = Mat::zeros(Size(512, 512), CV_8UC3);img = Scalar(255, 255, 255);//图像卷积操作Mat kernel = (Mat_<float>(3, 3) << 0, -1, 0, -1, 5, -1, 0, -1, 0);// 创建卷积核Mat dst;filter2D(image, dst, -1, kernel);// 图像卷积namedWindow("convolution_demo", WINDOW_FREERATIO);imshow("convolution_demo", dst);}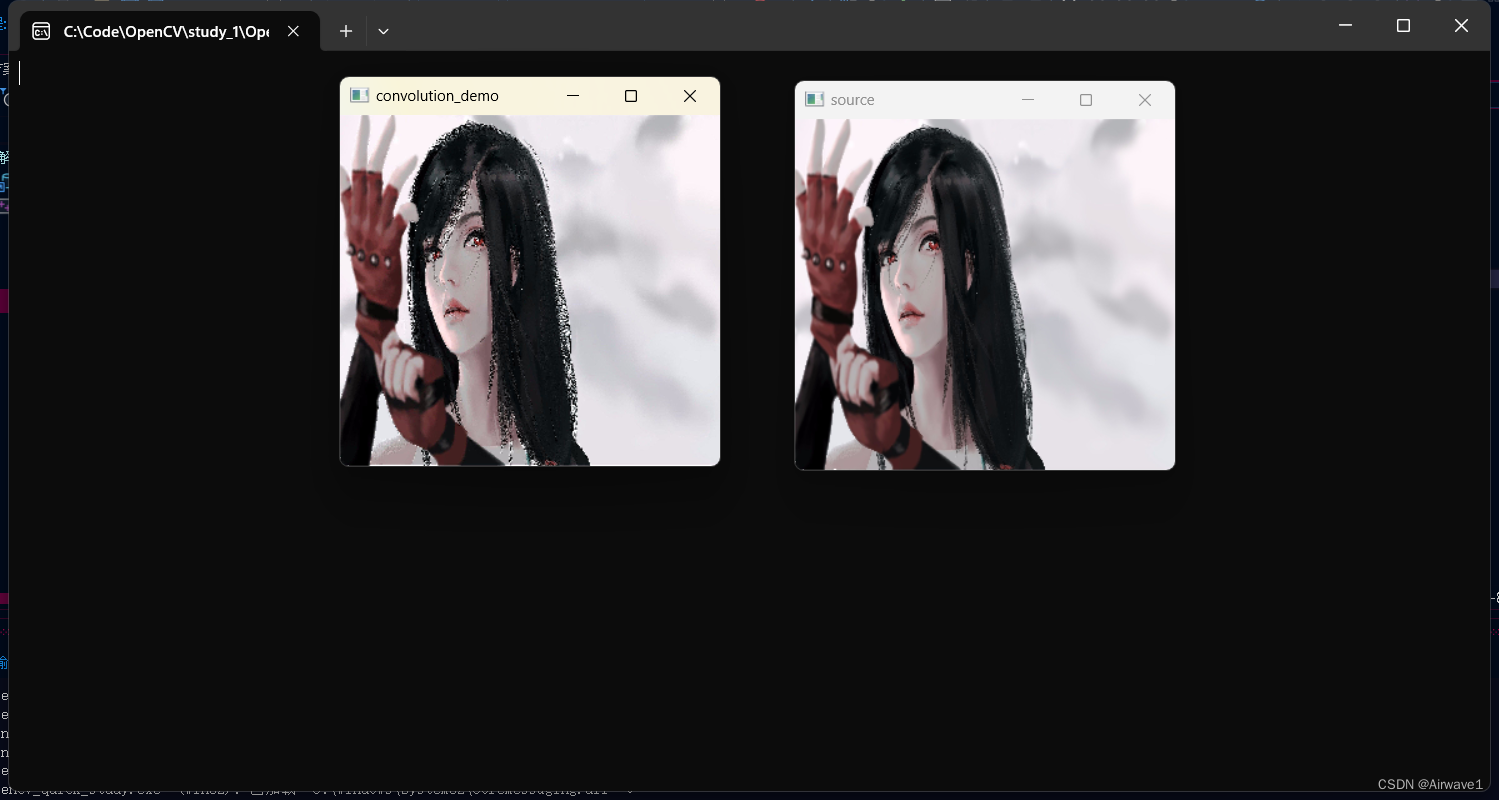
27.高斯模糊
高斯模糊(Gaussian Blur)是一种常用的图像模糊技术,它使用高斯函数对图像进行卷积,从而实现图像平滑处理。高斯模糊的主要目的是去除图像中的高频噪声,使图像更加平滑,减少细节信息,常用于图像预处理、边缘检测前的图像平滑等任务。
高斯模糊的原理:
高斯函数: 高斯函数是一种数学函数,通常用于表示正态分布。在图像处理中,高斯函数用于生成一个二维的高斯核(卷积核)。
卷积操作: 高斯核在图像上滑动,对图像中的每个像素进行加权和的计算。不同位置的像素受到的权重由高斯函数的形状决定,距离中心越远的像素权重越小。
权重计算: 高斯函数的形状由标准差(σ)决定,标准差越大,权重分布越广。权重计算采用二维高斯函数的值,将其归一化,得到最终的权重。
高斯模糊的步骤:
定义高斯核: 定义一个二维高斯核,指定标准差。
图像卷积: 将高斯核与图像进行卷积操作。
输出结果: 得到经过高斯模糊处理后的图像。
void TestDemo::gaussian_blur_demo(Mat& image){// 定义高斯核大小和标准差int kernel_size = 35;double sigma = 35;// 高斯模糊Mat dst;GaussianBlur(image, dst, Size(kernel_size, kernel_size), sigma);//GaussianBlur参数为输入图像、输出图像、高斯核大小、标准差namedWindow("gaussian_blur_demo", WINDOW_FREERATIO);imshow("gaussian_blur_demo", dst);}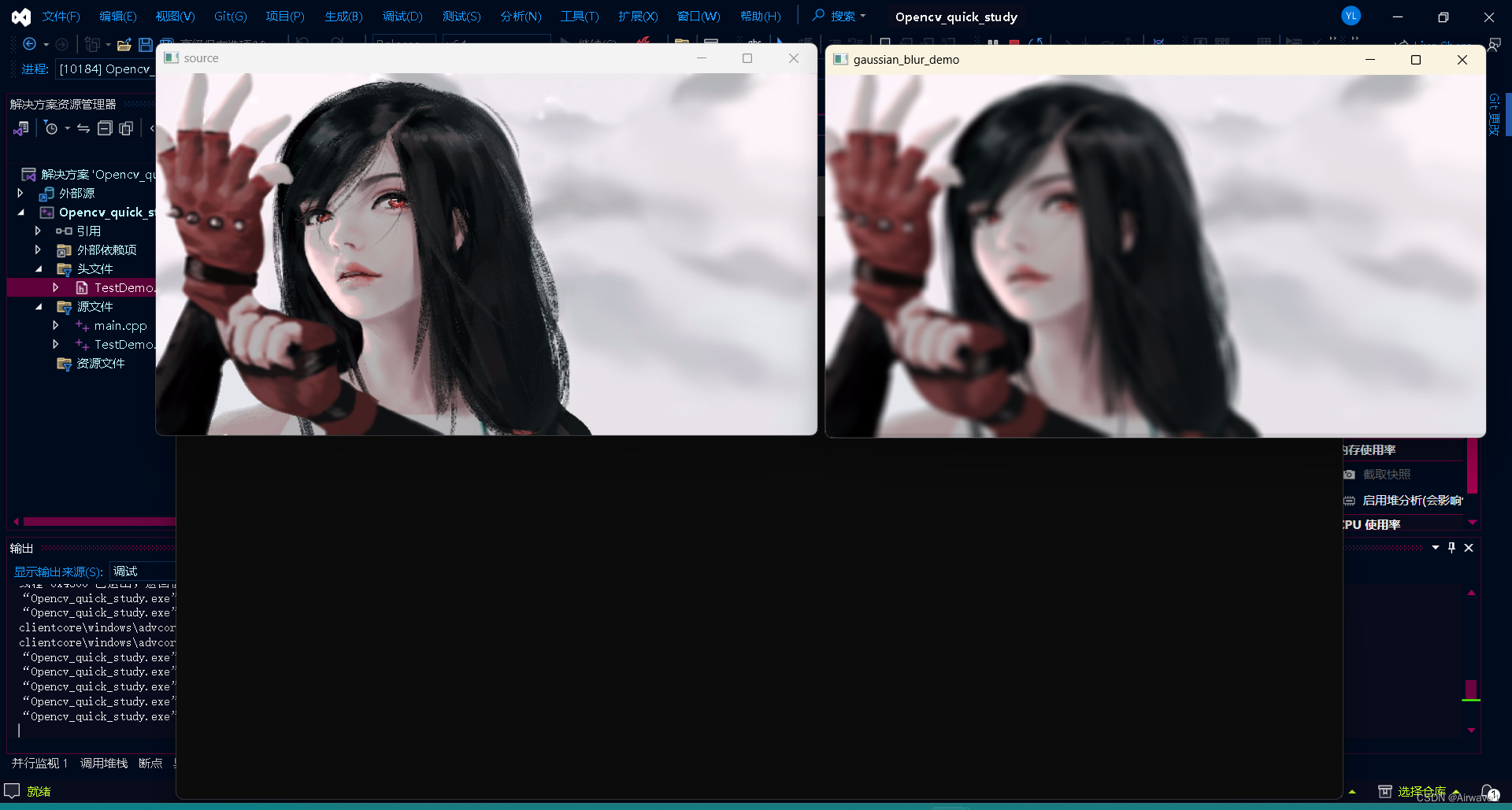
28.高斯双边模糊
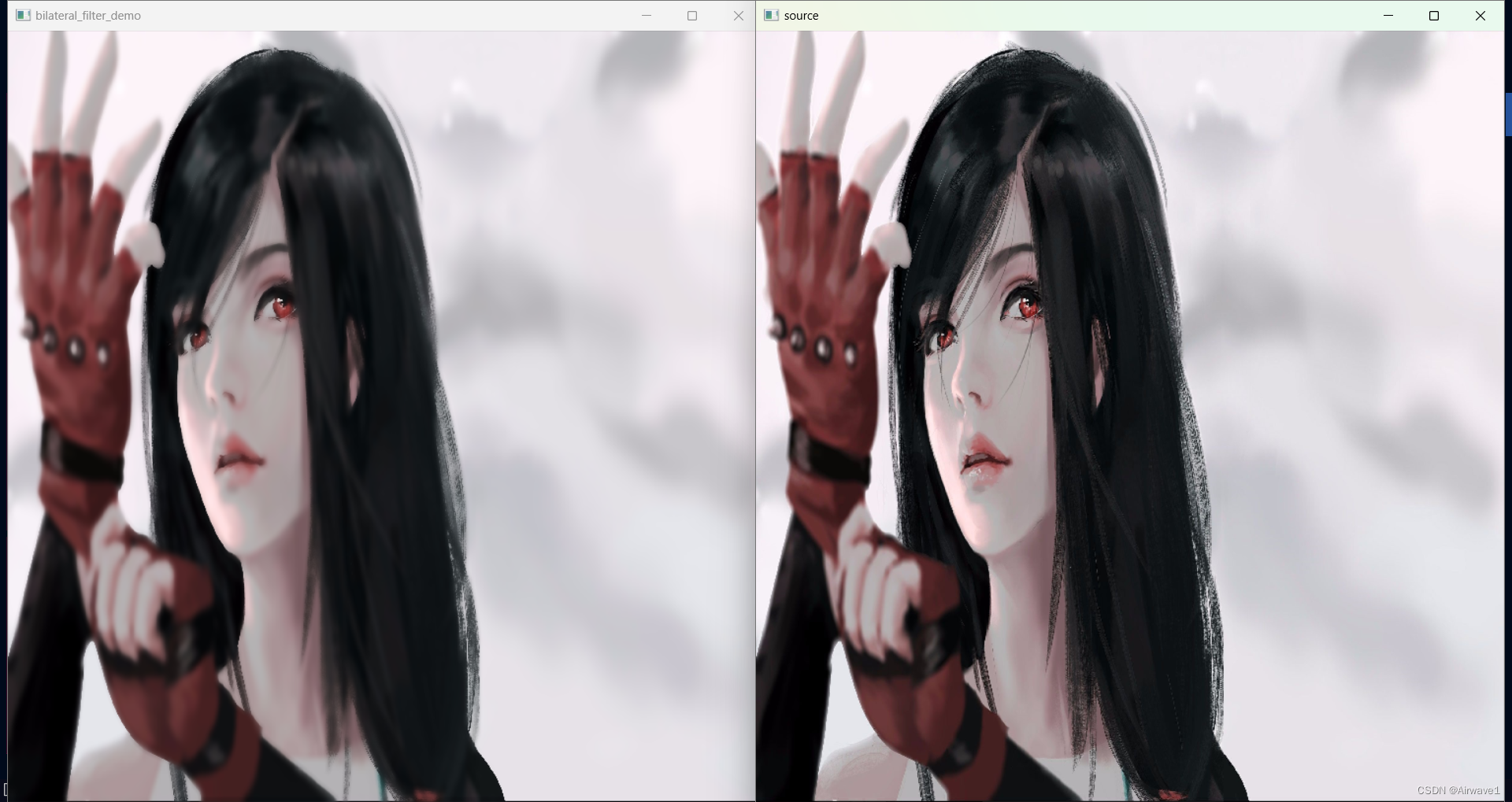
高斯双边滤波是一种保留边缘信息的模糊技术,它在模糊图像的同时保持图像的边缘细节。与简单的高斯模糊不同,高斯双边滤波考虑像素之间的空间距离和像素值之间的差异。
void TestDemo::bilateral_filter_demo(Mat& image){// 定义参数int diameter = 20; // 直径double sigma_color = 175.0; // 颜色空间标准差double sigma_space = 175.0; // 空间空间标准差// 高斯双边滤波Mat dst;bilateralFilter(image, dst, diameter, sigma_color, sigma_space);// 显示结果namedWindow("bilateral_filter_demo", WINDOW_FREERATIO);imshow("bilateral_filter_demo", dst);}diameter表示像素领域的直径,sigma_color表示颜色空间的标准差,sigma_space表示空间空间的标准差。调整这些参数可以影响滤波效果。
与高斯模糊不同,高斯双边滤波在模糊图像的同时会保留边缘信息,适用于需要模糊但又不希望失去图像边缘细节的场景。
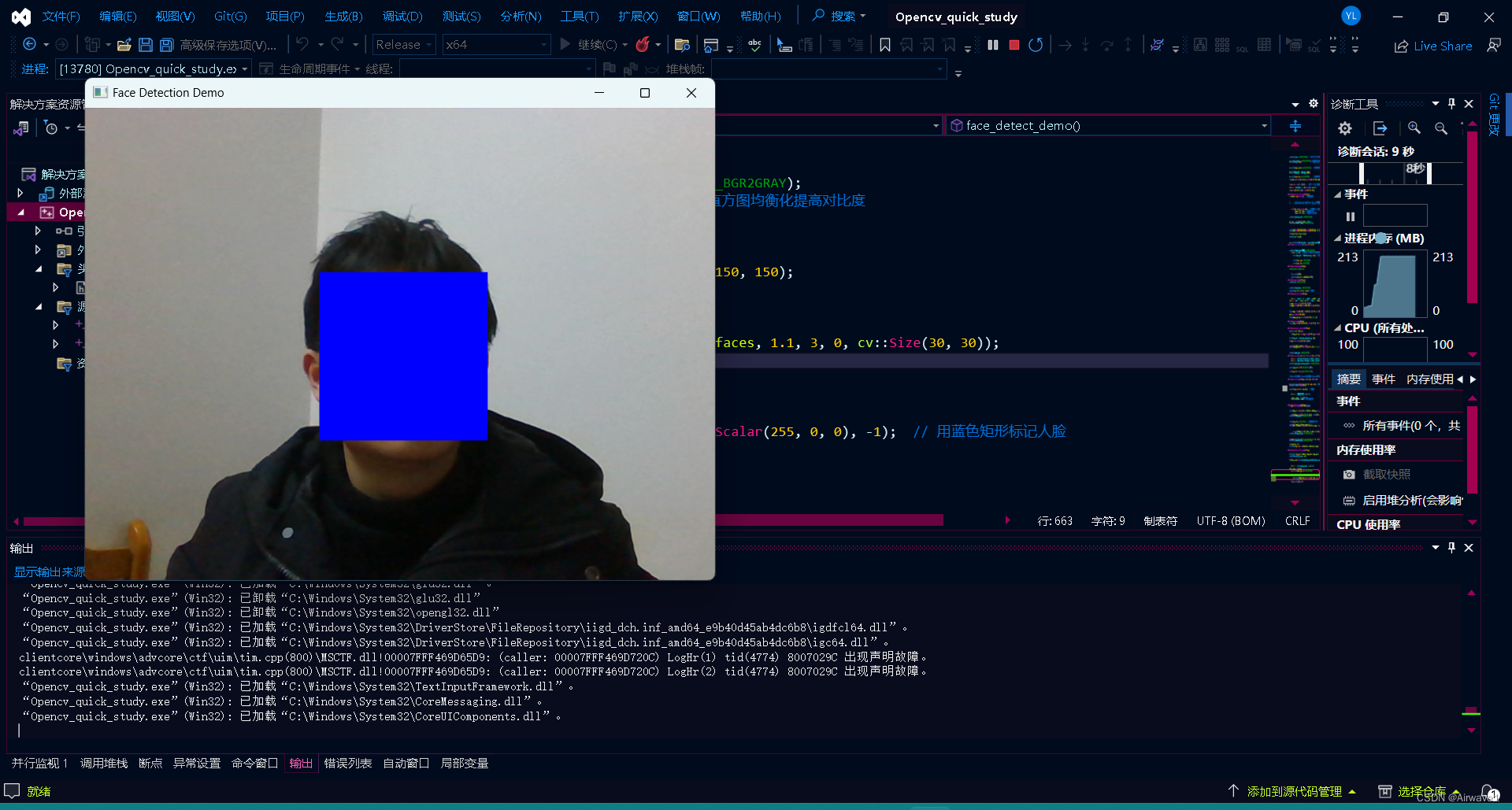
29.实时人脸检测
void TestDemo::face_detect_demo(){// 加载人脸检测器模型cv::CascadeClassifier face_cascade;if (!face_cascade.load("C:/tools/OpenCV/opencv/build/etc/haarcascades/haarcascade_frontalface_default.xml")){std::cerr << "Error loading face cascade model!" << std::endl;return;}// 在这里添加进行人脸检测的代码// 例如,可以在摄像头捕获的每一帧上运行人脸检测cv::VideoCapture capture(0); // 打开默认摄像头if (!capture.isOpened()){std::cerr << "Error opening camera!" << std::endl;return;}cv::Mat frame;while (capture.read(frame)){// 转换图像为灰度图cv::Mat gray;cv::cvtColor(frame, gray, cv::COLOR_BGR2GRAY);cv::equalizeHist(gray, gray); // 直方图均衡化提高对比度//进行双边滤波cv::Mat dst;cv::bilateralFilter(gray, dst, 20, 150, 150);// 进行人脸检测std::vector<cv::Rect> faces;face_cascade.detectMultiScale(dst, faces, 1.1, 3, 0, cv::Size(30, 30));// 在图像上标记检测到的人脸for (const auto& face : faces){cv::rectangle(frame, face, cv::Scalar(255, 0, 0), 2); // 用蓝色矩形标记人脸}// 显示结果cv::imshow("Face Detection Demo", frame);// 检测按键,按下ESC键退出循环if (cv::waitKey(30) == 27){break;}}}