文章目录
前言一、更新系统软件包二、安装依赖项三、下载 PCL 源码四、编译和安装 PCL五、测试安装成功1、 pcd_write.cpp2、CMakeLists.txt3、build
前言
PCL(Point Cloud Library)是一个开源的大型项目,专注于2D/3D图像和点云处理。PCL为点云数据的处理和分析提供了丰富的功能和算法,这些功能包括但不限于点云滤波、特征提取、表面重建、模型拟合、配准、分割等。下面我们再 Ubuntu 环境下安装 PCL 库。
一、更新系统软件包
首先确保 Ubuntu 系统上的软件包都是最新的,打开终端更新软件包。
sudo apt updatesudo apt upgrade二、安装依赖项
PCL 依赖于一些其他的库和工具,使用以下命令安装这些依赖项。
sudo apt install git cmake libboost-all-dev libeigen3-dev libflann-dev libvtk7-dev libqhull-devPCL 编译与安装需要 make 与 camke,使用以下命令安装这些。
sudo apt-get install git build-essential linux-libc-devsudo apt-get install cmake三、下载 PCL 源码
在终端执行以下命令,将 PCL 源码下载到 Ubuntu 环境中。
sudo apt-get install gitgit clone https://github.com/PointCloudLibrary/pcl.git四、编译和安装 PCL
进入下载好的 PCL 库源码目录,并创建一个新的目录用于构建。
cd pclmkdir releasecd releasecmake -DCMAKE_BUILD_TYPE=None -DCMAKE_INSTALL_PREFIX=/usr\ -DCMAKE_GPU=ON -DBUILD_apps=ON -DBUILD_examples=ON \ -DCMAKE_INSTALL_PREFIX=/usr ..makesudo make install五、测试安装成功
新建文件夹 test ,并新建 pcd_write.cpp,CMakeLists.txt,build 文件夹。
1、 pcd_write.cpp
#include <iostream> #include <pcl/io/pcd_io.h> #include <pcl/point_types.h> int main () { pcl::PointCloud<pcl::PointXYZ> cloud; // 创建一个PointXYZ类型的点云对象 // 设置点云的基本属性 cloud.width = 5; // 设置点云的宽度(点数) cloud.height = 1; // 设置点云的高度(通常为1,表示非组织化点云) cloud.is_dense = false; // 设置点云是否稠密(false表示点云可能包含NaN或无穷值) cloud.resize (cloud.width * cloud.height); // 根据宽度和高度调整点云的大小 // 使用随机数填充点云数据 for (auto& point: cloud) { point.x = 1024 * rand () / (RAND_MAX + 1.0f); // 为点的x坐标赋一个0到1024之间的随机浮点数 point.y = 1024 * rand () / (RAND_MAX + 1.0f); // 为点的y坐标赋一个0到1024之间的随机浮点数 point.z = 1024 * rand () / (RAND_MAX + 1.0f); // 为点的z坐标赋一个0到1024之间的随机浮点数 } // 将点云数据保存为PCD文件 pcl::io::savePCDFileASCII ("test_pcd.pcd", cloud); // 使用ASCII编码保存点云到文件 std::cerr << "Saved " << cloud.size () << " data points to test_pcd.pcd." << std::endl; // 输出保存的点云大小信息 // 遍历并打印点云中的每个点 for (const auto& point: cloud) std::cerr << " " << point.x << " " << point.y << " " << point.z << std::endl; // 输出每个点的x, y, z坐标 return (0); }2、CMakeLists.txt
cmake_minimum_required(VERSION 2.6 FATAL_ERROR) project(MY_GRAND_PROJECT) find_package(PCL 1.3 REQUIRED) # 将PCL的包含目录添加到项目的包含目录列表中,以便能够找到PCL的头文件 include_directories(${PCL_INCLUDE_DIRS}) # 将PCL的库目录添加到链接器搜索路径中 link_directories(${PCL_LIBRARY_DIRS}) add_definitions(${PCL_DEFINITIONS}) # 添加一个可执行文件目标,名为pcd_write_test,源文件为pcd_write.cpp add_executable(pcd_write_test pcd_write.cpp) # 将PCL的库链接到pcd_write_test可执行文件目标。这里${PCL_LIBRARIES}包含了PCL及其依赖的所有库 target_link_libraries(pcd_write_test ${PCL_LIBRARIES})3、build
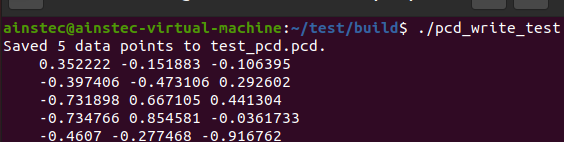
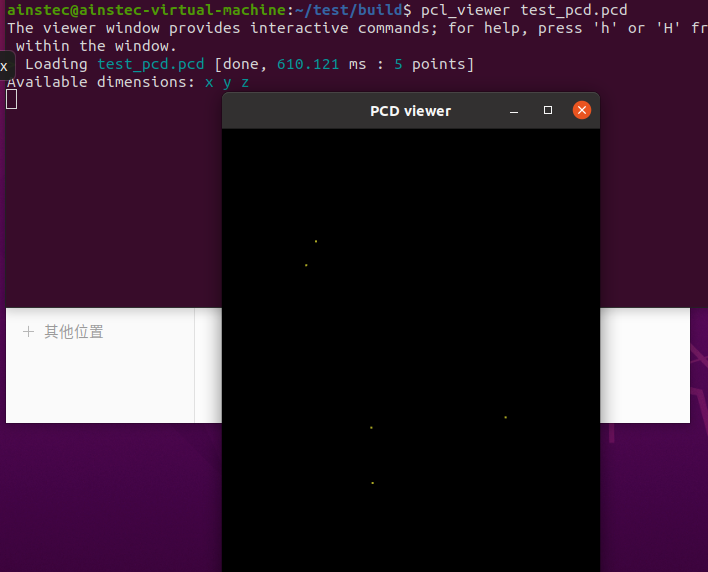
cd buildcmake ..make 当我们完成以上操作就会生成一个可执行文件,执行后会发现我们成功的生成了五个点云。

其他:
更多专栏订阅推荐:
? 【开卷数据结构】? 【备战蓝桥,冲击省一】 ? 从零开始的 c++ 之旅 ? 【OpenCV • c++】计算机视觉