AI识别几何特征课程链接,想了解更多,点这里

课程笔记-1.常见技术体系下的几何特征识别方法
1.数据源
点云数据:通常由激光雷达(LiDAR)、深度相机或其他3D扫描设备获取。
网格模型:由三角形面片组成的多边形网格,可以通过3D扫描、CAD软件或游戏引擎生成。
体素表示:将三维空间划分为体积单元(体素),每个体素代表空间的一部分。
特征提取:从原始数据中提取有意义的特征,如表面法线、曲率等。
2.深度学习方法
PointNet:直接处理无序的点云数据,通过共享多层感知机 (MLP) 和对称函数来学习点云特征。
PointNet++:通过层次化的采样和聚类策略来捕捉不同尺度的信息。
Graph CNNs:将点云建模为图结构,并使用图卷积网络 (Graph Convolutional Networks) 来学习节点特征。
Voxel-based CNNs:将点云转换成体素网格,然后使用传统的卷积神经网络 (CNNs) 进行处理。
Point Transformer:引入Transformer架构到点云处理中,利用自注意力机制来捕获长距离依赖关系。
课程笔记-2.三维模型的表示方法
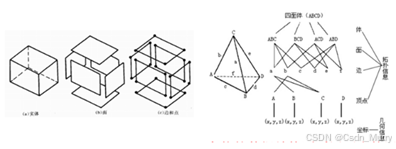
BREP(Boundary Representation)
一种基于几何实体边界的表示方法,它将几何实体分解为面、边和顶点等基本几何元素,并通过连接这些元素来表示整个几何体。BREP可以精确地表示几何体的形状和尺寸,因此非常适合进行CAD操作和工程分析。
Mesh
一种由无数小三角形组成的网格,其中每个三角形都由三个节点定义。Mesh通常用于表示复杂的曲面和非规则形状,例如数字造型和三维扫描数据等。相对于BREP,Mesh更适合进行表面重建、可视化和动画渲染等应用。
CSG(Constructive Solid Geometry)
一种基于基本几何体之间的布尔运算来生成复杂几何体的表示方法。CSG可以提供高效的建模工具,并且支持快速的几何操作,但是难以进行精确的CAD设计。
NURBS(Non-Uniform Rational B-Splines)
一种基于参数曲线和曲面的表示方法,能够非常准确地描述复杂的几何形状。NURBS在CAD建模和曲面造型等方面应用广泛,但是它们的计算量较大,处理起来比较复杂。
Voxel
一种基于像素的表示方法,将三维空间分割为小的体素(3D像素),并用每个体素的属性来表示整个几何体。Voxel通常用于表示密集的复杂几何体,例如人体、机械设备等。
| Space Dimension | Cell Type | Associated geometry |
| 0 | Vertex | Point |
| 1 | Edge | Curve |
| 2 | Face | Surface |
| 3 | Volume | 3D Space |
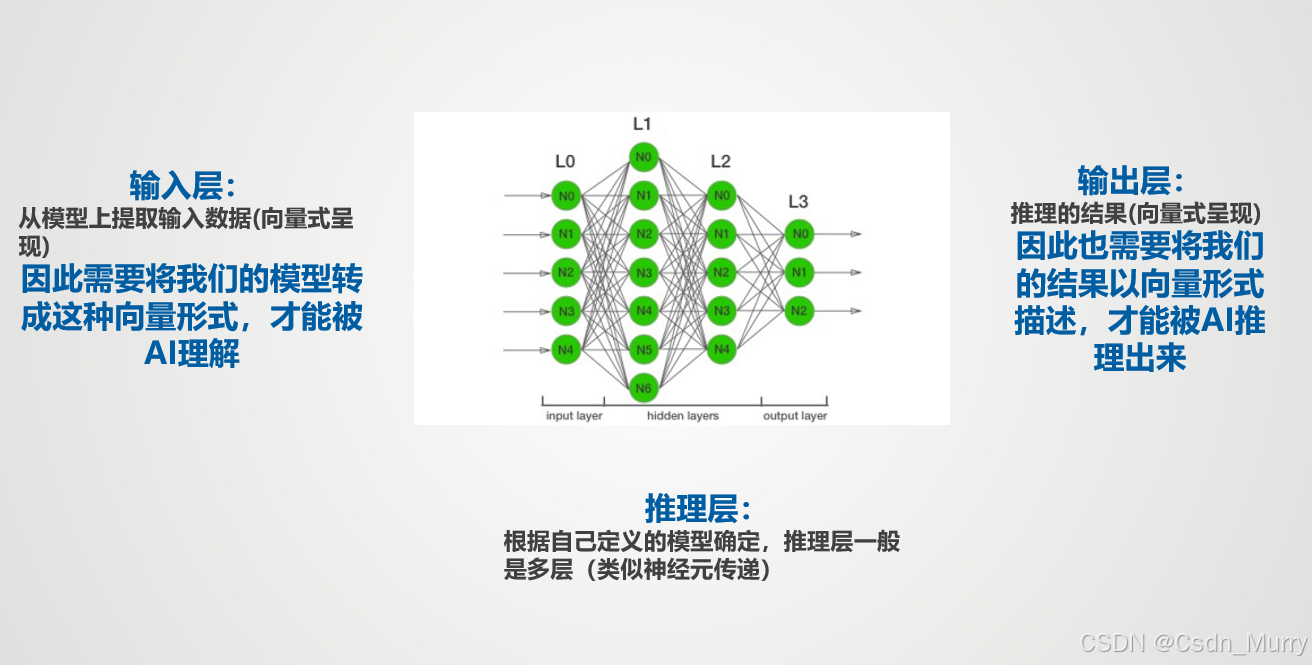
课程笔记-3.AI卷积神经网络的推理方法
课程笔记-4.基于Brep进行特征识别的优越性
