无迹卡尔曼滤波(Unscented Kalman Filter, UKF)是一种用于处理非线性系统状态估计的递归滤波器。相比于扩展卡尔曼滤波(EKF),UKF在处理非线性问题时通常表现得更为精确和稳健。它通过一种称为“无迹变换”(Unscented Transform, UT)的技术来近似非线性函数,从而避免了对雅可比矩阵的计算,这使得它对非线性系统有更好的适应性。
一、无迹卡尔曼滤波算法的基本原理
UKF的核心思想是通过选择一组称为“sigma点”的离散点来近似系统的状态分布。通过对这些sigma点进行非线性变换,然后计算这些点变换后的均值和协方差,从而得到对系统状态的估计。
主要步骤
1. 生成sigma点
对于状态向量![]() 和协方差矩阵
和协方差矩阵 ![]() ,生成一组sigma点。这些sigma点通过以下公式计算:
,生成一组sigma点。这些sigma点通过以下公式计算:
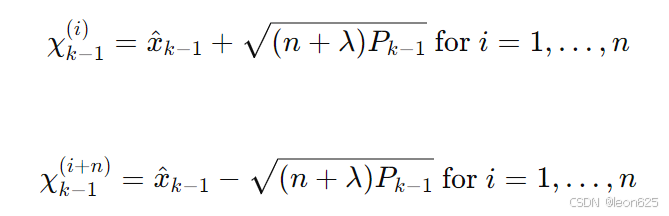
其中,λ 是缩放参数,n 是状态维度。
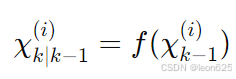
2.预测sigma点
将生成的sigma点通过状态转移函数![]() 进行非线性变换,得到预测的sigma点。
进行非线性变换,得到预测的sigma点。
3. 计算预测均值和协方差
根据预测的sigma点计算预测状态的均值和协方差:
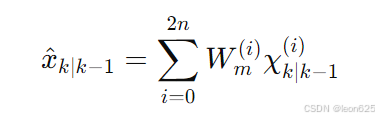

其中,![]() 和
和 ![]() 是sigma点的权重,Q是过程噪声协方差矩阵。
是sigma点的权重,Q是过程噪声协方差矩阵。
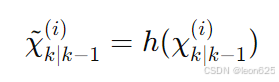
4. 预测测量
将预测的sigma点通过测量函数 ![]() 进行非线性变换,得到预测的测量sigma点:
进行非线性变换,得到预测的测量sigma点:
5. 计算测量均值和协方差
根据预测的测量sigma点计算测量的均值和协方差:


其中,![]() 是测量协方差矩阵,
是测量协方差矩阵,![]() 是状态与测量的交叉协方差矩阵,R是测量噪声协方差矩阵。
是状态与测量的交叉协方差矩阵,R是测量噪声协方差矩阵。
6. 更新
计算卡尔曼增益并更新状态估计和协方差矩阵:
![]()

其中,![]() 是实际测量值。
是实际测量值。
二、无迹卡尔曼滤波的优点
处理非线性:UKF比EKF能更好地处理强非线性系统,因为它避免了线性化误差。不需要计算雅可比矩阵:无迹卡尔曼滤波直接通过sigma点近似非线性函数,简化了计算。稳定性:在处理高非线性问题时比扩展卡尔曼滤波器更稳定。三、应用场景
无人驾驶汽车:实时估计车辆状态和环境感知。机器人控制:复杂机器人运动和位置估计。飞行控制:航天器和飞行器的状态估计与导航。金融数据分析:用于预测和风险评估。无迹卡尔曼滤波器由于其处理非线性问题的能力和较高的估计精度,在许多实际应用中都具有很大的优势。
四、MATLAB仿真程序
1. 设置系统模型
% 系统参数n = 4; % 状态维度m = 2; % 观测维度% 初始状态x0 = [0; 0; 1; 1];P0 = eye(n); % 状态协方差矩阵的初始值% 系统噪声Q = 0.1 * eye(n); % 过程噪声协方差R = 0.1 * eye(m); % 观测噪声协方差% 观测函数h = @(x) [x(1)^2; x(2)^2]; % 非线性观测函数% 状态转移函数f = @(x) [x(1) + x(3); x(2) + x(4); x(3); x(4)]; % 非线性状态转移函数% 时间参数dt = 0.1; % 时间步长T = 10; % 仿真总时间time = 0:dt:T; % 时间向量2. 无迹卡尔曼滤波器实现
% UKF参数设置alpha = 1e-3; % 控制sigma点的分布beta = 2; % 先验知识参数kappa = 0; % 可选参数,通常设为0lambda = alpha^2 * (n + kappa) - n; % 计算lambdac = n + lambda; % 权重常数% 权重Wm = [lambda / c; repmat(1 / (2 * c), 2 * n, 1)]; % 预测权重Wc = [lambda / c + (1 - alpha^2 + beta); repmat(1 / (2 * c), 2 * n, 1)]; % 更新权重% 初始化UKFx = x0; % 初始状态P = P0; % 初始协方差矩阵% 记录数据X_est = zeros(n, length(time)); % 状态估计X_true = zeros(n, length(time)); % 实际状态Y_meas = zeros(m, length(time)); % 观测数据% 仿真循环for t = 1:length(time) % 生成sigma点 sqrt_P = sqrtm(P); % 协方差矩阵的平方根 X_sig = [x, x + sqrt_P, x - sqrt_P]; % sigma点 % 状态传播 X_sig_pred = zeros(n, 2*n + 1); for i = 1:2*n + 1 X_sig_pred(:,i) = f(X_sig(:,i)); end % 计算预测均值和协方差 x_pred = X_sig_pred * Wm; P_pred = Q; for i = 1:2*n + 1 P_pred = P_pred + Wc(i) * (X_sig_pred(:,i) - x_pred) * (X_sig_pred(:,i) - x_pred)'; end % 生成观测sigma点 Y_sig_pred = zeros(m, 2*n + 1); for i = 1:2*n + 1 Y_sig_pred(:,i) = h(X_sig_pred(:,i)); end % 计算观测均值和协方差 y_pred = Y_sig_pred * Wm; P_yy = R; P_xy = zeros(n, m); for i = 1:2*n + 1 P_yy = P_yy + Wc(i) * (Y_sig_pred(:,i) - y_pred) * (Y_sig_pred(:,i) - y_pred)'; P_xy = P_xy + Wc(i) * (X_sig_pred(:,i) - x_pred) * (Y_sig_pred(:,i) - y_pred)'; end % 计算卡尔曼增益 K = P_xy / P_yy; % 更新状态和协方差矩阵 z = h(x) + sqrt(R) * randn(m,1); % 模拟观测 x = x_pred + K * (z - y_pred); P = P_pred - K * P_yy * K'; % 记录数据 X_est(:,t) = x; X_true(:,t) = f(x) + sqrt(Q) * randn(n,1); % 模拟真实状态 Y_meas(:,t) = h(X_true(:,t)) + sqrt(R) * randn(m,1); % 模拟观测end3. 绘制结果
% 绘制状态估计与真实状态figure;subplot(2,1,1);plot(time, X_true(1,:), 'g', time, X_est(1,:), 'b--');legend('True Position X', 'Estimated Position X');xlabel('Time (s)');ylabel('Position X');subplot(2,1,2);plot(time, X_true(2,:), 'g', time, X_est(2,:), 'b--');legend('True Position Y', 'Estimated Position Y');xlabel('Time (s)');ylabel('Position Y');说明
系统模型:
定义了非线性的状态转移函数和观测函数。设置了系统噪声和观测噪声的协方差矩阵。UKF参数设置:
选择适当的参数alpha、beta 和 kappa。计算sigma点的权重和lambda值。 无迹卡尔曼滤波器实现:
生成sigma点。传播状态和观测,计算预测均值和协方差。更新状态和协方差矩阵。结果绘制:
比较真实状态与估计状态的时间序列数据。这个示例程序展示了如何在MATLAB中实现无迹卡尔曼滤波算法,处理非线性系统的状态估计。实际应用中,可以根据具体系统和需求调整参数和模型。