若该文为原创文章,转载请注明出处
本文章博客地址:https://hpzwl.blog.csdn.net/article/details/142454993
长沙红胖子Qt(长沙创微智科)博文大全:开发技术集合(包含Qt实用技术、树莓派、三维、OpenCV、OpenGL、ffmpeg、OSG、单片机、软硬结合等等)持续更新中…
Qt开发专栏:项目实战(点击传送门)
OSG开发专栏(点击传送门)
需求
1.使用osg三维引擎进行动力学模型仿真性能测试;
2.打开动力学仿真模型文件,.k后缀的模型文件,测试加载解析过程;
3.解决第三方company的opengl制作的三维引擎,绘制面较多与弹丸路径模拟较卡顿的问题;
4.测试时,使用的模型为公开模型,基础面数量达到160多万个;
5.测试时,模拟动画使用的时100万条弹丸路径平行飞射出去;
相关博客
《OSG开发笔记(三十):OSG加载动力学仿真K模型文件以及测试Demo》:该博文也有针对性性能测试过程
Demo V1.1.0
1.新增打开双模型,第一个模型在原来的位置,第二个模型在偏移后的位置
2.优化打开关闭重新打开模型的过程
3.对于100万线动画射击,用于测试性能
4.当前模型为160万个面,双模型的时候为320多万个元素基础面
CSDN粉丝0积分下载:https://download.csdn.net/download/qq21497936/89786375
QQ群:博客技术大全文首行QQ技术群,点击“文件”搜索“osgKFile”,群内与博文同步更新)
Demo v1.0.0
测试交互流畅性,交互无延迟!!!
模块化部署
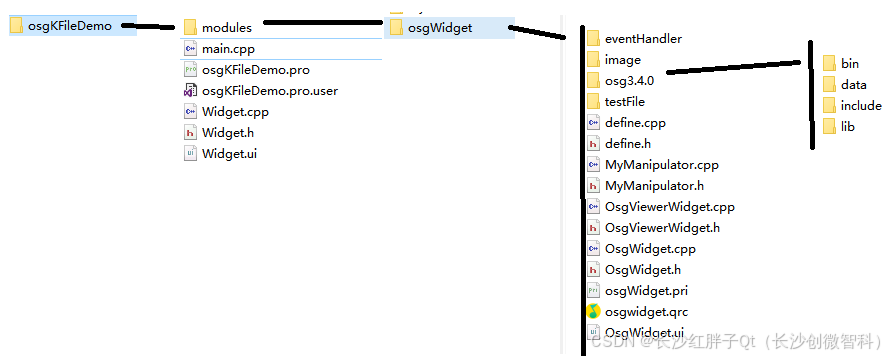
关键源码
OsgWidget.h
#ifndef OSGWIDGET_H#define OSGWIDGET_H#include <QWidget>#include "OsgViewerWidget.h"#include "MyManipulator.h"#include "osg/PolygonMode"class AnimationPathCameraMainpulator;namespace Ui {class OsgWidget;}class OsgWidget : public QWidget{ Q_OBJECTpublic: // 模型结构体 struct Element_Shell // *ELEMENT_SHELL { Element_Shell() { } qint64 eid; // 单元id qint64 pid; // 材料id qint64 n1; // 节点1,定义几何形状 qint64 n2; // 节点2,定义几何形状 qint64 n3; // 节点3,定义几何形状 qint64 n4; // 节点4,定义几何形状 qint64 n5; // 厚度,额外的节点在标准的LS-DYNA四边形壳单元定义中是没有意义的。 qint64 n6; // 积分点数,额外的节点在标准的LS-DYNA四边形壳单元定义中是没有意义的。 qint64 n7; // 额外的节点在标准的LS-DYNA四边形壳单元定义中是没有意义的。 qint64 n8; // 额外的节点在标准的LS-DYNA四边形壳单元定义中是没有意义的。 }; struct Part // *PART { Part() { } qint64 pid; // 部件的id号,唯一 qint64 secid; // 有*section关键字定义的section的id号 QList<Element_Shell> listElementShell; // 部件片元 qint64 mid; // 部件的材料号 qint64 eosid; // 部件所属材料涉及的状态方程号,由*EOS关键字定义 qint64 hgid; // 沙漏或体积粘性参数编号,由*HOURGLASS关键字定义,取0表示将采用默认的数值: qint64 grav; // 仅对实体单元有效,取0表示对所有PART进行重力初始化,取1表示仅对当前材料初始化 qint64 adpopt; // 标识该部件是否采用自适应网格划分,取0表示不采用 qint64 tmid; // 标识该部件是否采用自适应网格划分,取0表示不采用 }; struct Node { Node() { } qint64 nid; // 结点号,唯一 double x; // 三维x坐标(全局) double y; // 三维y坐标(全局) double z; // 三维z坐标(全局) int tc; // 平动自由度受约束状态,枚举值:0-无平动约束,1-X方向平动约束,2-Y方向平动约束 int rc; // 转动自由度收约束状态,枚举值:0-无转动约束,1-X方向转动约束,2-Y方向转动约束 }; struct K_Mode { K_Mode() {} QList<Part> listPart; QList<Node> listNode; QHash<int, Node> hashNid2Node; }; // 添加模型 K_Mode kMode;public: explicit OsgWidget(QWidget *parent = 0); ~OsgWidget();public: bool getFixXAxis() const; // 获取X轴固定状态 bool getFixYAxis() const; // 获取Y轴固定状态 bool getFixZAxis() const; // 获取Z轴固定状态 void getCenter(double &x, double &y, double &z); // 获取引擎中心点坐标 void getPersonPoint(double &x, double &y, double &z); // 获取初始化人眼的角度(看向引擎中心点)public: void setFixXAxis(bool fixXAxis); // 设置固定X轴 void setFixYAxis(bool fixYAxis); // 设置固定Y轴 void setFixZAxis(bool fixZAxis); // 设置固定Z轴 void setCenter(double x, double y, double z); // 设置引擎中心点坐标 void setPersonPoint(double x, double y, double z); void setEnablePolygonMode(bool enable); void startAnimation(); void pauseAnimation(); void stopAnimation();public: bool loadKFile(QString filePath); bool loadK2File(QString filePath, int num, int x, int y, int z); void clear(); void resetCoordinate();protected: void initOsg(); // osg初始化 void loadNode(osg::ref_ptr<osg::Node> pNode); // 加载场景根节点protected: osg::ref_ptr<osg::Node> createScene(); // 创建总场景 osg::ref_ptr<osg::Node> createAnimation(); // 创建动画protected: void resizeEvent(QResizeEvent *event); void keyPressEvent(QKeyEvent* event); void keyReleaseEvent(QKeyEvent* event); void mousePressEvent(QMouseEvent* event); void mouseReleaseEvent(QMouseEvent* event); void mouseDoubleClickEvent(QMouseEvent* event); void mouseMoveEvent(QMouseEvent* event); void wheelEvent(QWheelEvent* event); void timerEvent(QTimerEvent *event);private: Ui::OsgWidget *ui;private: OsgViewerWidget *_pViewer; // osg场景嵌入Qt核心类 osg::ref_ptr<osg::MatrixTransform> _pRoot; // osg场景根节点private: float _xDistance; // x轴单个tick间距 int _xTickNumber; // x轴tick数(例如:5的时候,是6个,0~5) float _yDistance; // y轴单个tick间距 int _yTickNumber; // y轴tick数(例如:5的时候,是6个,0~5) float _zDistance; // z轴单个tick间距 int _zTickNumber; // z轴tick数(例如:5的时候,是6个,0~5) QString _zUnit; // z轴单位 float _zTickLabelOffset; // z轴坐标偏移 QString _yUnit; // y轴单位 float _zTickUnitLabelOffset; // z轴坐标偏移 QColor _gridColor; // 轴颜色 QColor _labelColor; // 轴tickLabel的颜色 osg::ref_ptr<osg::Node> _pNode; // 模型 osg::ref_ptr<osg::Node> _pNode2; // 子弹 osg::ref_ptr<MyManipulator> _pManipulator; // 自定义漫游器 osg::Vec3d _eyeVect3D; // 原始坐标,用于复位原始视角 osg::Vec3d _centerVect3D; // 原始坐标,用于复位原始视角 osg::Vec3d _upVect3D; // 原始坐标,用于复位原始视角 K_Mode _kMode; int _timerId; osg::ref_ptr<osg::StateSet> _pStateSet; osg::ref_ptr<osg::PolygonMode> _pPolygonMode; osg::ref_ptr<osg::Vec3Array> _pVec3Array; // 炮弹 bool _animationPausing;};#endif // OSGWIDGET_HOsgWidget.cpp
bool OsgWidget::loadK2File(QString filePath, int num, int x, int y, int z){ if(!QFile::exists(filePath)) { LOG << "Not exist file:" << filePath; QMessageBox::information(0, "错误", QString("Not exist file: %1").arg(filePath)); return false; } QFile file(filePath); if(!file.open(QIODevice::ReadOnly)) { LOG << "Failed to open file:" << filePath; QMessageBox::information(0, "错误", QString("Failed to open file: %1").arg(filePath)); return false; } kMode = K_Mode(); QTextStream textStream(&file); QString context; qint64 rowIndex = -1; context = textStream.readLine(); rowIndex++; LOG; ... file.close(); LOG; osg::ref_ptr<osg::Group> pGroup = new osg::Group; for(int index = 0; index < num; index++) { LOG << index; // 绘图 { for(int partIndex = 0; partIndex < kMode.listPart.size(); partIndex++) { // 创建一个用户保存几何信息的对象 osg::ref_ptr<osg::Geometry> pGeometry = new osg::Geometry; // 创建四个顶点的数组 osg::ref_ptr<osg::Vec3Array> pVec3Array = new osg::Vec3Array; // 添加四个顶点 pGeometry->setVertexArray(pVec3Array.get()); // 创建四种颜色的数据 osg::ref_ptr<osg::Vec4Array> pVec4Array = new osg::Vec4Array; // 添加四种颜色 pGeometry->setColorArray(pVec4Array.get()); // 绑定颜色 pGeometry->setColorBinding(osg::Geometry::BIND_PER_VERTEX); double r, g, b; r = qrand() % 100 * 1.0f / 100; g = qrand() % 100 * 1.0f / 100; b = qrand() % 100 * 1.0f / 100; for(int elementShellIndex = 0; elementShellIndex < kMode.listPart.at(partIndex).listElementShell.size(); elementShellIndex++) { // x y z pVec3Array->push_back(osg::Vec3(kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n1).x + index * x, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n1).y + index * y, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n1).z + index * z)); pVec3Array->push_back(osg::Vec3(kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n2).x + index * x, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n2).y + index * y, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n2).z + index * z)); pVec3Array->push_back(osg::Vec3(kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n3).x + index * x, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n3).y + index * y, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n3).z + index * z)); pVec3Array->push_back(osg::Vec3(kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n4).x + index * x, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n4).y + index * y, kMode.hashNid2Node.value(kMode.listPart.at(partIndex).listElementShell.at(elementShellIndex).n4).z + index * z)); // r g b a(a设置无效,估计需要其他属性配合) pVec4Array->push_back(osg::Vec4(r, g, b, 1.0)); pVec4Array->push_back(osg::Vec4(r, g, b, 1.0)); pVec4Array->push_back(osg::Vec4(r, g, b, 1.0)); pVec4Array->push_back(osg::Vec4(r, g, b, 1.0)); } // 注意:此处若不绑定画笔,则表示使用之前绑定的画笔 // 为唯一的法线创建一个数组 法线: normal osg::ref_ptr<osg::Vec3Array> pVec3ArrayNormal = new osg::Vec3Array; pGeometry->setNormalArray(pVec3ArrayNormal.get()); pGeometry->setNormalBinding(osg::Geometry::BIND_OVERALL); pVec3ArrayNormal->push_back(osg::Vec3(0.0, -1.0, 0.0)); // 由保存的数据绘制四个顶点的多边形 pGeometry->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::QUADS, 0, kMode.listPart.at(partIndex).listElementShell.size() * 4)); // pGeometry->addPrimitiveSet(new osg::DrawArrays(osg::PrimitiveSet::QUADS, 0, 4)); // 向Geode类添加几何体(Drawable) osg::ref_ptr<osg::Geode> pGeode = new osg::Geode; pGeode->addDrawable(pGeometry.get());#if 0 { _pStateSet = pGeometry->getOrCreateStateSet(); // _pPolygonMode = new osg::PolygonMode(osg::PolygonMode::FRONT_AND_BACK, osg::PolygonMode::LINE); _pPolygonMode = new osg::PolygonMode(osg::PolygonMode::FRONT_AND_BACK, osg::PolygonMode::FILL); _pStateSet->setAttribute(_pPolygonMode, osg::StateAttribute::ON); }#endif pGroup->addChild(pGeode.get()); } } } // 始终是灰色,这里需要设置关闭光照:OFF,同时旋转都能看到了(光照关闭,法向量不起作用) { osg::StateSet *pStateSet = pGroup->getOrCreateStateSet(); // pStateSet->setMode(GL_LIGHTING, osg::StateAttribute::ON); pStateSet->setMode(GL_LIGHTING, osg::StateAttribute::OFF); } _pNode = pGroup.get(); if(_pNode.get() == 0) { return false; } _pRoot->addChild(_pNode); return true;}工程模板v1.1.0
