自动控制:前馈控制
前馈控制是一种在控制系统中通过预先计算和调整输入来应对已知扰动或变化的方法。相比于反馈控制,前馈控制能够更快速地响应系统的变化,因为它不依赖于系统输出的反馈信号。前馈控制的应用在工业过程中尤为广泛,尤其是在需要迅速响应和高精度控制的场合。
前馈控制的优势
系统响应速度更快:前馈控制能够提前补偿系统中预知的干扰,减少系统的响应延迟。更好地处理非线性系统:前馈控制可以预测非线性系统引起的干扰,并提前在输入控制量中进行补偿,提高控制系统的响应准确度和稳定性。对系统的模型不确定性更为鲁棒:前馈控制基于被控对象的模型,适用于模型存在误差、摩擦或其他非理想状态的情况。根据不同的控制目标,前馈控制器主要有两种类型:抗扰前馈控制器和跟踪前馈控制器。
抗扰前馈控制器
定义和原理
抗扰前馈控制器(Disturbance Rejection Feedforward Controller)主要用于抑制系统中的扰动。这种控制器在检测到扰动后,通过计算并施加一个与扰动相反的控制输入,来抵消扰动对系统的影响。其工作原理如下:
扰动检测:实时检测系统中的扰动源。扰动补偿计算:根据系统模型计算出所需的补偿量。施加补偿控制:将计算得到的补偿量施加到系统中,抵消扰动影响。应用场景
抗扰前馈控制器广泛应用于化工、热控等过程中。例如,在化工过程中,反应温度的变化会影响产品的质量,通过检测温度扰动并实时补偿,可以保持温度的稳定性。
优点
快速响应扰动:抗扰前馈控制器能够在扰动发生时立即检测并进行补偿,使系统能够迅速恢复到稳定状态。提高系统稳定性:通过提前补偿扰动,减少了系统的振荡和不稳定现象。提高控制精度:减少了扰动对系统输出的影响,提高了控制精度。实例
考虑一个化工反应器的温度控制问题,假设外界温度变化会影响反应器的温度。通过安装温度传感器,实时检测外界温度的变化,并计算出相应的补偿热量,施加到反应器中,保持反应器温度的稳定。
跟踪前馈控制器
定义和原理
跟踪前馈控制器(Tracking Feedforward Controller)主要用于精确跟踪系统的参考输入。它通过预测参考输入的变化,并提前计算和施加相应的控制输入,使系统能够快速、准确地跟踪参考信号。其工作原理如下:
参考信号预测:根据系统模型预测参考信号的变化。控制输入计算:计算出使系统输出跟踪参考信号的控制输入。施加控制输入:将计算得到的控制输入施加到系统中,实现精确跟踪。应用场景
跟踪前馈控制器广泛应用于机器人控制、自动驾驶等领域。例如,在自动驾驶中,需要车辆能够精确跟踪预定的行驶路线,通过预测车辆位置和路径,提前计算转向角度和速度,可以实现高精度的路径跟踪。
优点
提高跟踪精度:跟踪前馈控制器能够使系统输出快速、准确地跟踪参考信号,提高跟踪精度。减少跟踪误差:通过提前补偿系统的动态变化,减少了跟踪误差。提高系统响应速度:能够快速响应参考信号的变化,提高系统的动态性能。实例
考虑一个机器人臂的运动控制问题,假设机器人臂需要按照预定的轨迹运动。通过提前计算轨迹上的位置、速度和加速度,并相应调整关节的驱动力矩,可以使机器人臂精确地跟踪预定轨迹。
Python代码示例
下面我们通过一个简单的Python代码示例,演示前馈控制的基本原理。假设我们有一个简单的温度控制系统,目标是通过前馈控制来补偿外界温度的扰动,保持系统温度的稳定。
import numpy as npimport matplotlib.pyplot as plt# 定义系统参数dt = 0.1 # 时间步长t = np.arange(0, 10, dt) # 时间数组n = len(t)# 初始化状态变量temperature = np.zeros(n) # 系统温度desired_temperature = np.ones(n) * 0 # 期望温度external_disturbance = np.sin(t) * 10 # 外界扰动# 前馈控制器feedforward_control = -external_disturbance # 直接补偿扰动# 模拟系统for i in range(1, n): # 施加前馈控制 temperature[i] = temperature[i-1] + feedforward_control[i] * dt# 绘制结果plt.figure(figsize=(10, 4))plt.plot(t, desired_temperature, label='Desired Temperature')plt.plot(t, temperature, label='Actual Temperature')plt.plot(t, external_disturbance, label='External Disturbance')plt.xlabel('Time [s]')plt.ylabel('Temperature')plt.legend()plt.title('Feedforward Control for Temperature System')plt.grid(True)plt.show()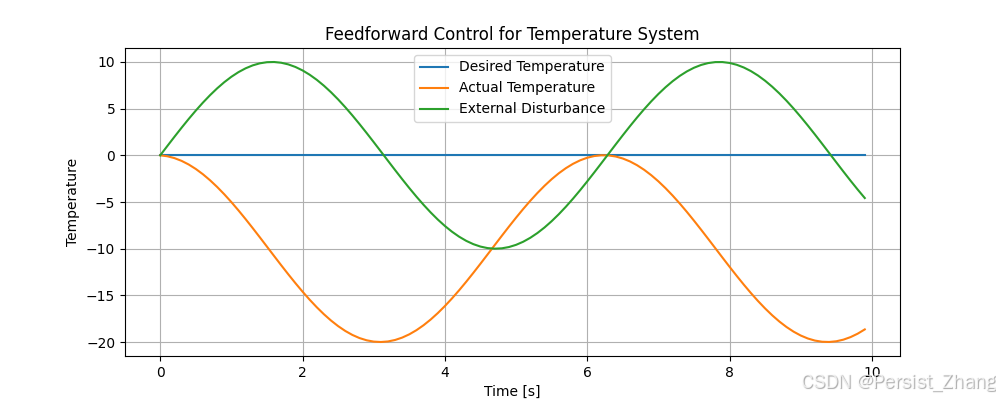
代码说明
系统参数和时间数组:首先定义了时间步长dt 和时间数组 t,用来模拟系统在一段时间内的行为。状态变量初始化:初始化了系统温度 temperature、期望温度 desired_temperature 和外界扰动 external_disturbance。前馈控制器:直接将外界扰动 external_disturbance 作为前馈控制量 feedforward_control 进行补偿。系统模拟:通过迭代计算,在每个时间步长内施加前馈控制量,更新系统温度。结果绘制:使用 matplotlib 绘制系统温度、期望温度和外界扰动的变化曲线。 结论
前馈控制通过提前预测系统的扰动或参考信号变化,并计算出相应的控制输入,能够快速响应系统的变化,提高系统的控制精度和稳定性。抗扰前馈控制器主要用于抑制系统中的扰动,而跟踪前馈控制器则用于精确跟踪参考输入。在实际应用中,前馈控制通常与反馈控制相结合,形成复合控制策略,以充分发挥两者的优势,提高系统的控制性能。