自动控制——过阻尼、欠阻尼、临界阻尼及无阻尼
引言
在自动控制系统和振动分析中,系统的阻尼特性对于系统的动态响应至关重要。阻尼决定了系统在受到扰动或输入信号后,如何恢复到稳定状态。本文将详细介绍过阻尼(overdamped)、欠阻尼(underdamped)、临界阻尼(critically damped)和无阻尼(undamped)的定义、公式,并通过Python代码演示不同阻尼条件下系统的响应。
系统的阻尼特性
考虑一个典型的二阶线性系统,其传递函数可以表示为:
H ( s ) = ω n 2 s 2 + 2 ζ ω n s + ω n 2 H(s) = \frac{\omega_n^2}{s^2 + 2\zeta\omega_n s + \omega_n^2} H(s)=s2+2ζωns+ωn2ωn2
其中:
- ω n \omega_n ωn是系统的自然频率。
- ζ \zeta ζ是阻尼比,定义为 ζ = c 2 m k \zeta = \frac{c}{2\sqrt{mk}} ζ=2mk c,其中 c c c是阻尼系数, m m m是质量, k k k是弹簧常数。
根据阻尼比 ζ \zeta ζ的不同,系统的动态响应分为以下几种类型:
1. 无阻尼(Undamped)
当 ζ = 0 \zeta = 0 ζ=0时,系统没有阻尼力的影响,其响应为纯粹的正弦波动,永不衰减。无阻尼系统在自然频率 ω n \omega_n ωn下振荡。
x ( t ) = A cos ( ω n t ) + B sin ( ω n t ) x(t) = A \cos(\omega_n t) + B \sin(\omega_n t) x(t)=Acos(ωnt)+Bsin(ωnt)
2. 欠阻尼(Underdamped)
当 0 < ζ < 1 0 < \zeta < 1 0<ζ<1时,系统处于欠阻尼状态。系统响应在频率 ω d = ω n 1 − ζ 2 \omega_d = \omega_n \sqrt{1-\zeta^2} ωd=ωn1−ζ2 下振荡,并随着时间指数衰减。
x ( t ) = e − ζ ω n t ( A cos ( ω d t ) + B sin ( ω d t ) ) x(t) = e^{-\zeta\omega_n t} \left( A \cos(\omega_d t) + B \sin(\omega_d t) \right) x(t)=e−ζωnt(Acos(ωdt)+Bsin(ωdt))
欠阻尼系统的特征是系统会振荡几次,然后逐渐趋于平衡。
3. 临界阻尼(Critically Damped)
当 ζ = 1 \zeta = 1 ζ=1时,系统处于临界阻尼状态。此时系统响应速度最快,不会出现振荡,但也不会像过阻尼那样慢慢回到平衡状态。
x ( t ) = ( A + B t ) e − ω n t x(t) = (A + Bt) e^{-\omega_n t} x(t)=(A+Bt)e−ωnt
临界阻尼是最理想的阻尼状态,它能确保系统迅速回到平衡而不出现振荡。
4. 过阻尼(Overdamped)
当 ζ > 1 \zeta > 1 ζ>1时,系统处于过阻尼状态。系统响应不再振荡,但相比于临界阻尼系统,它恢复到平衡所需的时间更长。
x ( t ) = A e ( λ 1 t ) + B e ( λ 2 t ) x(t) = A e^{(\lambda_1 t)} + B e^{(\lambda_2 t)} x(t)=Ae(λ1t)+Be(λ2t)
其中, λ 1 \lambda_1 λ1和 λ 2 \lambda_2 λ2是系统的特征根,且 λ 1 , λ 2 < 0 \lambda_1, \lambda_2 < 0 λ1,λ2<0。
Python代码实现
下面的Python代码演示了一个简单的二阶系统在不同阻尼条件下的时间响应。
import numpy as npimport matplotlib.pyplot as pltfrom scipy.signal import lti, step# 定义系统的自然频率和时间范围omega_n = 5.0 # 自然频率t = np.linspace(0, 5, 500)# 定义不同阻尼比的系统systems = { 'Undamped (ζ=0)': lti([omega_n**2], [1, 0, omega_n**2]), 'Underdamped (ζ=0.5)': lti([omega_n**2], [1, 2*0.5*omega_n, omega_n**2]), 'Critically Damped (ζ=1)': lti([omega_n**2], [1, 2*1.0*omega_n, omega_n**2]), 'Overdamped (ζ=2)': lti([omega_n**2], [1, 2*2.0*omega_n, omega_n**2])}# 绘制每个系统的阶跃响应plt.figure(figsize=(10, 6))for label, system in systems.items(): t, y = step(system, T=t) plt.plot(t, y, label=label)# 图表设置plt.title('不同阻尼条件下的系统阶跃响应')plt.xlabel('时间 [s]')plt.ylabel('响应')plt.grid(True)plt.legend()plt.show()代码解释
lti: scipy.signal.lti 函数用于定义线性时不变(LTI)系统。step: step 函数用于计算系统的阶跃响应。systems: 定义了四种不同阻尼比 ζ \zeta ζ的系统:无阻尼、欠阻尼、临界阻尼和过阻尼。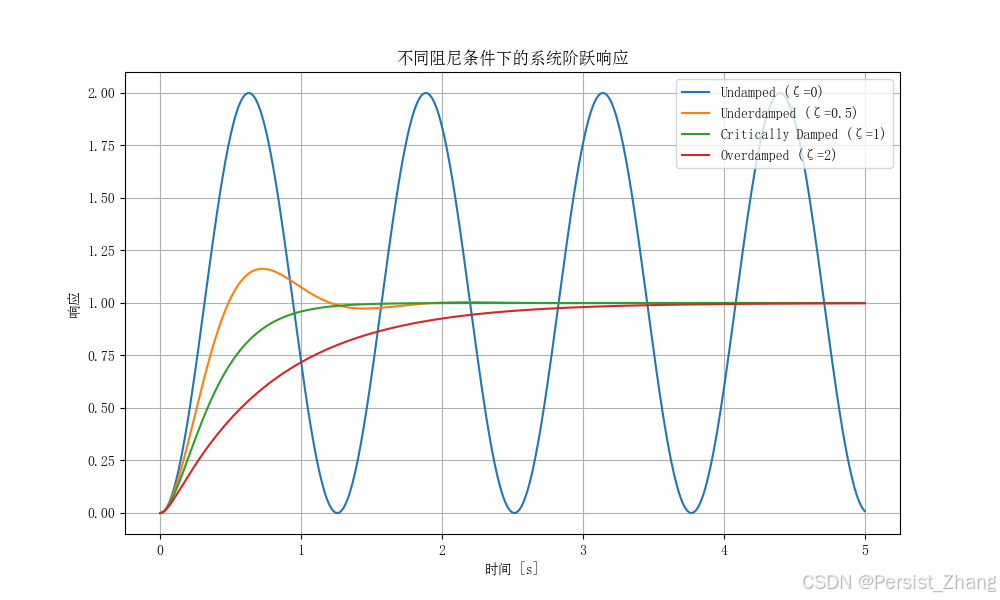
结论
通过上述分析和代码演示,我们可以看到阻尼比 ζ \zeta ζ对系统动态响应的影响:
无阻尼系统( ζ = 0 \zeta = 0 ζ=0)会永远振荡,不会衰减。欠阻尼系统( 0 < ζ < 1 0 < \zeta < 1 0<ζ<1)会振荡几次,随着时间的推移逐渐平稳。临界阻尼系统( ζ = 1 \zeta = 1 ζ=1)是理想的,它在不振荡的情况下快速回到平衡。过阻尼系统( ζ > 1 \zeta > 1 ζ>1)不会振荡,但比临界阻尼系统更慢地回到平衡状态。理解和设计适当的阻尼对于工程应用至关重要,能够有效避免系统的过冲、延迟或持续振荡。在实际应用中,通常会设计系统使其接近临界阻尼状态,以确保快速而稳定的响应。