1.外观
2.物理参数
| 底座尺寸 | 180mm×180mm |
| 高度 | 700mm |
| 质量 | 25kg |
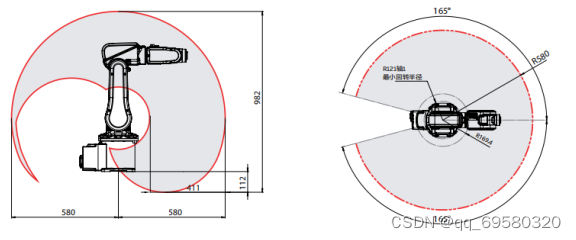
3.基本尺寸
工作范围:580mm
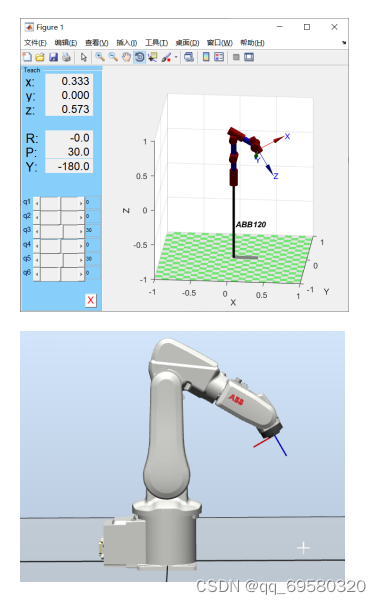
建立坐标系
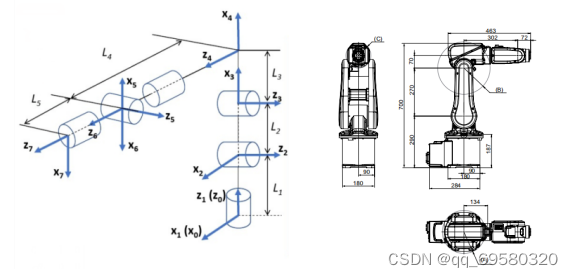
IRB120的D—H参数表如表所示。表中,Θ1是机械臂相邻两个连杆之间的夹角;Di是机械臂两个连杆之间的距离,也就是第n个关节的偏距;αi是机械臂关节n的轴线和关节规n-1轴线的角度;ai是机械臂第i个连杆的长度。
DH参数表
| 连杆i | 变量θi(°) | αi(°) | ai(mm) | Di(mm) | 变量范围 |
| 轴1旋转 | Θ1(0) | -90 | 0 | L1(290) | +165°~-165° |
| 轴2手臂 | Θ2(0) | 0 | L2(270) | 0 | +110°~-110° |
| 轴3手臂 | Θ3(30) | -90 | L3(70) | 0 | +70°~-110° |
| 轴4手腕 | Θ4(0) | 90 | 0 | L4(302) | +160°~-160° |
| 轴5弯曲 | Θ5(30) | -90 | 0 | 0 | +120°~-120° |
| 轴6翻转 | Θ6(0) | 0 | 0 | L5(72) | +400°~-400° |
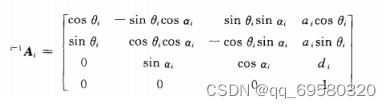
相邻连杆之间的D—H坐标系变换矩阵由
i-1A=Rot(Zi-1,Θi)Trans(0,0,di)Transai(ai,0,0)Rot(Xi,ai)
{![]() }
}
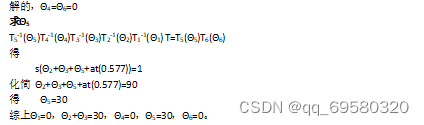
可以得到
利用MATLAB计算
T1 =
1.0000 0 0 0
0 0 1.0000 0
0 -1.0000 0 0.2900
0 0 0 1.0000
T2 =
1.0000 0 0 0.2700
0 1.0000 0 0
0 0 1.0000 0
0 0 0 1.0000
T3 =
0.8660 0 -0.5000 0.0606
0.5000 0 0.8660 0.0350
0 -1.0000 0 0
0 0 0 1.0000
T4 =
1.0000 0 0 0
0 0 -1.0000 0
0 1.0000 0 0.3020
0 0 0 1.0000
T5 =
0.8660 0 -0.5000 0
0.5000 0 0.8660 0
0 -1.0000 0 0
0 0 0 1.0000
T6 =
1.0000 0 0 0
0 1.0000 0 0
0 0 1.0000 0.0720
0 0 0 1.0000
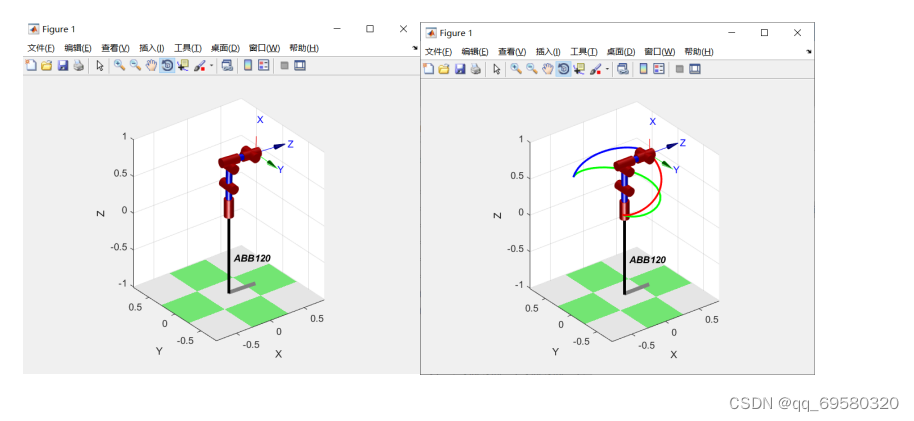
T=T1×T2×T3×T4×T5×T6
T =
0.5000 0 -0.8660 0.1173
0 -1.0000 0 0
-0.8660 0 -0.5000 -0.0425
0 0 0 1.0000
(贴的图片)

DH参数表
| 连杆i | 变量θi(°) | αi(°) | ai(mm) | Di(mm) | 变量范围 |
| 轴1旋转 | Θ1(0) | -90 | 0 | L1(290) | +165°~-165° |
| 轴2手臂 | Θ2(0) | 0 | L2(270) | 0 | +110°~-110° |
| 轴3手臂 | Θ3(30) | -90 | L3(70) | 0 | +70°~-110° |
| 轴4手腕 | Θ4(0) | 90 | 0 | L4(302) | +160°~-160° |
| 轴5弯曲 | Θ5(30) | -90 | 0 | 0 | +120°~-120° |
| 轴6翻转 | Θ6(0) | 0 | 0 | L5(72) | +400°~-400° |
(需要原文件可以私聊。)