张士玉小黑屋
一个关注IT技术分享,关注互联网的网站,爱分享网络资源,分享学到的知识,分享生活的乐趣。
当前位置:首页 - 第13720页
敬姝陆瓒昼山月小说全章节最新阅读
发布 : hao1 | 分类 : 《休闲阅读》 | 评论 : 0 | 浏览 : 96次
目录:《被暴君读心后,他以爱为名囚我终生》小说介绍《被暴君读心后,他以爱为名囚我终生》小说试读《被暴君读心后,他以爱为名囚我终生》小说介绍无删减版本古代言情小说《被暴君读心后,他以爱为名囚我终生》,文章的原创作者叫做 昼山月,男女主角分别是敬姝陆瓒,小说简介如下:倒是陆瓒,听到她这媚意横生的声音,气息越发不稳,手上的力道也渐渐加重。待他一只手沿着她纤细的眼线……《被暴君读心后,他以爱为名囚我终生》小说试读皇后便看着陆瓒半搂着他最宠爱的贵妃,一路往永寿宫的方向走去。她温婉含笑的眼底,透出一丝别人看不到的苦涩。今夜十五,圣上本该去她的坤宁宫的。片刻后,皇后便定下心神,起身说道:“好了,时候不早了,都散了吧。”随后,就安置吴晚玉吴美人进宫事宜。今
Elasticsearch:从 ES|QL 到 PHP 对象
发布 : jing | 分类 : 《我的小黑屋》 | 评论 : 0 | 浏览 : 196次
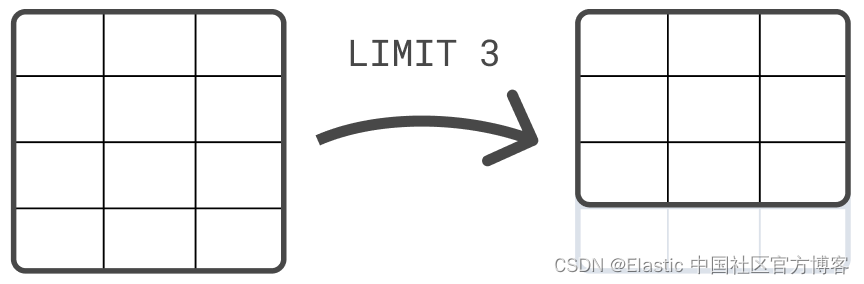
作者:来自Elastic EnricoZimuel从elasticsearch-phpv8.13.0开始,你可以执行ES|QL 查询并将结果映射到stdClass或自定义类的PHP对象。ES|QLES|QL是Elasticsearch8.11.0中引入的一种新的Elasticsearch查询语言。目前,它在技术预览版中可用。它提供了一种强大的方法来过滤、转换和分析存储在Elasticsearch中的数据。它利用“管道”(|)逐步操作和转换数据。这种方法允许用户组合一系列操作,其中一个操作的输出成为下一个操作的输入,从而实现复杂的数据转换和分析。例如,以下查询返回sample_data索引的前3个文档(行):FROMsam
Qt下使用QWebEngineView实现百度地图的显示
发布 : 云 | 分类 : 《关注互联网》 | 评论 : 0 | 浏览 : 269次
文章目录前言一、前期准备二、HTML文件创建三、实现步骤四、示例完整代码总结前言本文讲述了在Qt下使用QWebEngineView来加载HTML页面,实现该需求是需要连接网络的,这里进行了百度地图的嵌入显示,主要内容将结合相应的示例进行讲解,以便大家学习,如有错误之处,欢迎大家批评指正。项目效果提示:以下是本篇文章正文内容,下面案例可供参考一、前期准备下面是我的示例相关信息:Qt构建环境:Qt5.14_MSVC2017_64bit地图文件:baiduMap.html交互工具:qwebchannel.js这里的构建环境使用的是MSVC编译器,这样才能使用qwebengineview,在项目的pro文件中需要添加下列代码:QT+=webenginewidget
基于Selenium+Python的web自动化测试框架(附框架源码+项目实战)
发布 : zhihu | 分类 : 《随便一记》 | 评论 : 0 | 浏览 : 207次

目录一、什么是Selenium?二、自动化测试框架三、自动化框架的设计和实现四、需要改进的模块五、总结总结感谢每一个认真阅读我文章的人!!!重点:配套学习资料和视频教学一、什么是Selenium?Selenium是一个基于浏览器的自动化测试工具,它提供了一种跨平台、跨浏览器的端到端的web自动化解决方案。Selenium主要包括三部分:SeleniumIDE、SeleniumWebDriver和SeleniumGrid。SeleniumIDE:Firefox的一个扩展,它可以进行录制回放,并把录制的操作以多种语言(例如java、python等)的形式导出成测试用例。SeleniumWebDriver:提供Web自动化所需的API,主要用作浏览器控制、
《我再婚后,渣前夫疯了》小说章节在线试读,《我再婚后,渣前夫疯了》最新章节目录
发布 : 难哄 | 分类 : 《休闲阅读》 | 评论 : 0 | 浏览 : 131次

陆梨季之臣作为《我再婚后,渣前夫疯了》这本书的主角,佚名写的内容很吸引人,是一本不可多得的总裁豪门小说了。主要讲述了:“小敏,道歉。”季老夫人怒声道。季敏被季老夫人那么一瞪,不太服气,她又没有说错。秦眉了解自己的女儿,她捏着季敏的手,警告她,“跟秦先生道歉。”“不是跟我道歉,让她跟小梨子道歉。”秦志突…《我再婚后,渣前夫疯了》精彩章节试读“小敏,道歉。”季老夫人怒声道。季敏被季老夫人那么一瞪,不太服气,她又没有说错。秦眉了解自己的女儿,她捏着季敏的手,警告她,“跟秦先生道歉。”“不是跟我道歉,让她跟小梨子道歉。”秦志突然收敛自己冷漠的气势,淡淡的说道。“我孙女不太懂事,让秦先生看笑话了。”季老夫人苦笑。此时楼上书房。季之臣警告陆梨,“陆梨,秦志是个危险的男人,你最好离他远
主人公叫赵潜龙陈玉华的小说《官途:从文旅科长开始》免费阅读
发布 : hao1 | 分类 : 《关于电脑》 | 评论 : 0 | 浏览 : 99次

《官途:从文旅科长开始》此书作为平和心境的一本男频小说,主角赵潜龙陈玉华人物性格刻画鲜明,深刻情节曲折且丰富,题材相对新颖,跌宕起伏值得一看。主要讲述了:第7章当场羞辱听说明轩任职消息,马水蓉满脸笑意地说道:“哎呦,明轩,你以后就是董局了。你放心,只要你不嫌弃玉华跟那废物结过婚,我肯定好好给玉华做思想工作。”“阿姨,我确实喜欢玉华,以后肯定会对她好的…《官途:从文旅科长开始》精彩章节试读第7章当场羞辱听说明轩任职消息,马水蓉满脸笑意地说道:“哎呦,明轩,你以后就是董局了。你放心,只要你不嫌弃玉华跟那废物结过婚,我肯定好好给玉华做思想工作。”“阿姨,我确实喜欢玉华,以后肯定会对她好的。”董明轩立即表态。看着未来的丈母娘,董明轩已经脑补出旗袍遮盖下的无限风景,甚至一副母女同床的画面,
无删减版《官途:从文旅科长开始》小说免费阅读
发布 : shanchahua | 分类 : 《关于电脑》 | 评论 : 0 | 浏览 : 113次

《官途:从文旅科长开始》精彩章节试读第5章美好总是短暂赵潜龙原先根本不会打听女人的情况,现在两个人已经发生了亲密关系,还不知道人家的名字,好像是不负责任。只是这个女人叹了一口气,悠悠地说道:“你不用知道我是干什么的?叫什么名字?以后我们应该不会再见面了。”“还有我已经结婚,只不过和他一直没什么感情,但是也不能让他知道此事,所以今天的事情你一定要保密。”<p为了让女人放心,赵潜龙立即发誓:“姐,我保证不说,我绝对不说。你放心,就算被人打死,今天的事情我也不会说。”发完誓,赵潜龙又疑惑地问道:“姐,既然你们之间没有感情,为什么不离婚?”这个女人脸色一暗:“许多事情一时说不清楚,你也难以明白。我有我的难处。其实很多夫妻一辈子形同陌路,却不会离婚。”她出身于京城的权贵家庭,身
小说完结推荐穿越荒年开局猛打渣女姐姐免费阅读萧毅谢玉姝_穿越荒年开局猛打渣女姐姐免费阅读(萧毅谢玉姝)好看的小说推荐完结 -
发布 : yang | 分类 : 《我的小黑屋》 | 评论 : 0 | 浏览 : 120次

《穿越荒年开局猛打渣女姐姐免费阅读》中的人物萧毅谢玉姝拥有超高的人气,收获不少粉丝。作为一部小说推荐,“月光微凉”创作的内容还是有趣的,不做作,以下是《穿越荒年开局猛打渣女姐姐免费阅读》内容概括:见他如此,谢玉姝心下倒松了口气,看样子不会留下什么后遗症,人也没傻!还好没事,否则在她眼皮子底下出事,她还真觉得对不住原主!原主家里穷归穷,但家人之间感情却很好,也从不像旁人家那样苛待女儿,否则也不会在这荒年里留她到十五岁才嫁人。就算后来将她嫁给萧毅这个瘸子,也是她被退婚坏了名声在先。整整一年,给说...第8章谢宝田和谢宝树听了都点头“这倒是,你奶奶管你们严也是为你们好!”谢玉姝点点头她由老实变的“活泼”的事就这么过关了!“谢玉
继承道观后小道姑她主业算命简兮冯雪晴最新全本小说_无弹窗全文免费阅读继承道观后小道姑她主业算命(简兮冯雪晴) -
发布 : tong | 分类 : 《我的小黑屋》 | 评论 : 0 | 浏览 : 113次
经典力作《继承道观后小道姑她主业算命》,目前爆火中!主要人物有简兮冯雪晴,由作者“悦悦爱瞅瞅”独家倾力创作,故事简介如下:霍承熙成功的被她转移了话题,有些骄傲的说道:“那是,这B大可是国内的第一学府呢,你六师兄我可是凭实力考进来的,而且还是第一名哦!”简兮白了他一眼,切了一声,“六师兄,我没瞎,你这脑袋上就差直接写着‘我是文曲星下凡’这几个大字了!”霍承熙难得不好意思的挠了挠头两人这一番互动简直是惊呆了一众过来打探的人她们虽然隔得远,听不见两人说的什么,但是两人的动作她们可是看的一清二楚,霍承熙竟然抱了那个女生!...第50章这人好像有点蠢啊!他示意一下徐岩,徐岩秒懂,掏出手机去一边给程北打电话。“徐助理不用打电话了!”
小说完结推荐我离开后,冷面大佬红了眼眶陆北墨南浅_我离开后,冷面大佬红了眼眶陆北墨南浅无弹窗小说免费阅读 -
发布 : 难哄 | 分类 : 《我的小黑屋》 | 评论 : 0 | 浏览 : 106次
《我离开后,冷面大佬红了眼眶》,是作者大大“小洋伞”近日来异常火爆的一部高分佳作,故事里的主要描写对象是陆北墨南浅。小说精彩内容概述:”兰川说着,扶起南浅。南浅本不想去医院的,她刚才从医院跑出来。可胃里实在难受,这地方离医院又近。“兰川,我还是想参演钢琴独奏,我知道你有门路,再换别家吧...第43章听到兰川声音,南浅抬眼看着他:“兰川,你、怎么来了?”“我不放心,找了你很久。”兰川说着,看到她捂住胸口,问道:“胃不舒服吗?”“应该、是吧。”南浅也不太确定。“是和你情绪有关系,你这么伤心难过,身体怎么吃得消?我送你去医院检查—下。”兰川说着,扶起南浅。南浅本不想去医院的,她刚才从医院跑出来。可胃里实在难受,这地方离医院又近
search zhannei
最新文章
-
- 实习期遭遇职场霸凌,我杀疯了(吴丽华)全书浏览_实习期遭遇职场霸凌,我杀疯了全书浏览
- 重回支教第一天(白倩陈露)_重回支教第一天
- 人生不相见章节目录_傅夜霁周明珠江离全文阅读
- 《姜璃蒋曦方文玥》大结局免费试读_《姜璃蒋曦方文玥》最新章节目录
- 《平妻入门日,圣旨和离时》苏妤迩萧临川平妻入门日,圣旨和离时精选章节章节列表在线试读
- 《沈玉薇顾昀川》小说章节目录精彩试读_绣榻春残小说阅读
- 小三将女儿丢在车里活活热死,偏心的丈夫的让我杀疯了傅天行叶金莲完整篇在线阅读
- 江禾江黎小说阅读_灼焰归禾精选章节
- 说好只炒房,你转身偷取全球财富小说试读_许哲薛洋小说全文章节列表
- 刘美娥王玉成穿成六零后老太:瞧着奇葩一家子小说免费试读全文章节目录精彩章节
- 《陈良张阿牛》小说章节列表免费阅读_我,宗门杂役,绝品宝药当饭吃!小说阅读
- 《苏晴楚曜》小说章节列表精彩阅读_逆命影姬:七皇子的掌心娇小说全文
Copyright © 2020-2022 ZhangShiYu.com Rights Reserved.豫ICP备2022013469号-1